
目录
1.绝对轨迹误差(Absolute Trajectory Error, ATE)
1.1旋转+平移的均方根误差
1.2 仅计算平移的均方根误差
2.相对轨迹误差(Relative Pose Error, RPE)
2.1旋转+平移的均方根误差
2.2平移的均方根误差
3.代码部分
4.evo工具
4.1 evo工具安装以及使用说明
4.2 evo中计算ATE(APE)
4.2 evo中计算RPE
常用评估轨迹误差的方式有两种:绝对轨迹误差(ATE)与相对轨迹误差(RPE)
1.绝对轨迹误差(Absolute Trajectory Error, ATE)
绝对轨迹误差即为求每个位姿李代数的均方根
如图,有两条轨迹,一条为真实轨迹esti,一条为slam算法估算的轨迹gt, 将两条轨迹分为无数个点,并在上面分别取两个点Pesti,i和Pg,i,其相对于原点P的计算公式如下,其中T为欧式变化(属于李群)
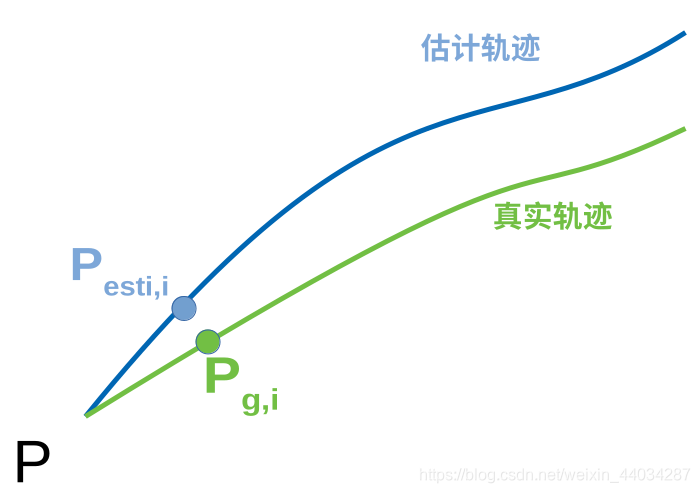

计算第i个点的误差error的李群形式,写成相除的形式比较好理解:
1.1旋转+平移的均方根误差
由于我们最终求的是李代数的均方根,所以先求error对应的李代数,提出一个负号(可在代码中验证)
取范数后,取均方根得到ATEall,取范数后正负号不影响
1.2 仅计算平移的均方根误差
在获取平移的均方根时,不需要转换到李代数,在欧式变换(李群)中取出其平移量计算均方根。
2.相对轨迹误差(Relative Pose Error, RPE)
2.1旋转+平移的均方根误差
相对轨迹误差是计算相隔时间的两帧之间位姿之差的精度。(有点绕)
(时间对应可能不止1帧,但是是帧数的整数比如1,2,3...帧)
还是一样,两条轨迹分别为真实轨迹gi,算法估计轨迹esti,这次需要在上面取两个点,对于任意的i点有相应后的点,两条轨迹上的四个点分别记为
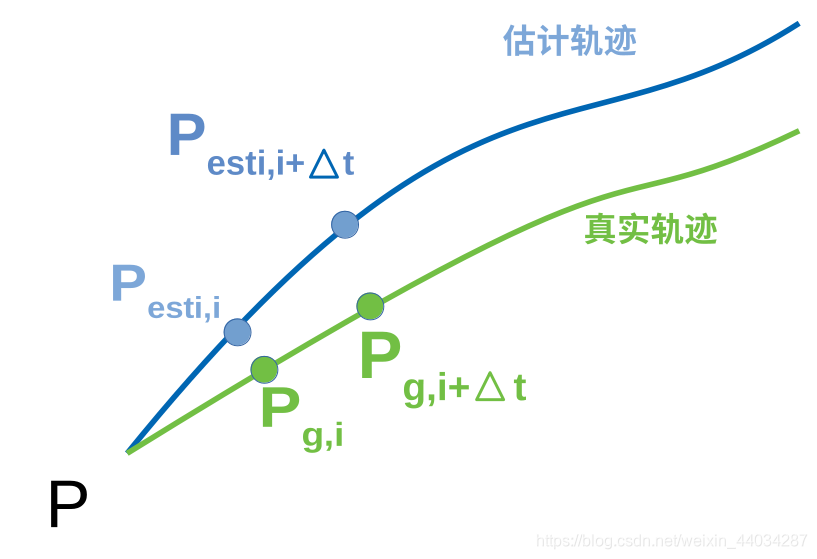
与ATE不同的是,RPE是分别计算每条轨迹上两个时刻(也就是两个点)的变化,再求这两个变化的误差。
分别求真实轨迹gi和算法估计轨迹esti的变化,还是用李代数表示:
真实轨迹上两帧之间的变化的李代数:
算法估计轨迹上两帧之间的变化的李代数:
最后在计算两帧之间变化的误差:
最后取均方根得到RPEall,注意是之前说的对应的是整数帧数,取均方根的时候取到
2.2平移的均方根误差
在获取平移的均方根时,不需要转换到李代数,在欧式变换(李群)中取出其平移量计算均方根。
3.代码部分
这部分引用高博《视觉slam14讲》ch4/example中的数据groundtruth.txt和estimated.txt(https://github.com/gaoxiang12/slambook2)
#include<pangolin/pangolin.h> #include <iostream> #include <sophus/se3.hpp> #include <fstream> #include <unistd.h> #include <Eigen/Core> #include <Eigen/Dense> using namespace std; using namespace Sophus; using namespace Eigen; string groundtruth_file = "/home/liao/workspace/slambook2/ch4/example/groundtruth.txt"; string estimated_file = "/home/liao/workspace/slambook2/ch4/example/estimated.txt"; typedef vector<Sophus::SE3d, Eigen::aligned_allocator<Sophus::SE3d>> TrajectoryType; TrajectoryType ReadTrajectory(const string& file_name); void DrawTrajectory(const TrajectoryType& gt, const TrajectoryType& esti); vector<double> calculateATE(const TrajectoryType& gt, const TrajectoryType& esti); vector<double> calculateRPE(const TrajectoryType& gt, const TrajectoryType& esti); int main(int argc, char argv) { //读取高博slam14讲中的groundtruth.txt和estimated.txt的数据 auto gi = ReadTrajectory(groundtruth_file); cout << "gi read total " << gi.size() << endl; auto esti = ReadTrajectory(estimated_file); cout << "esti read total " << esti.size() << endl; vector<double> ATE, RPE; ATE = calculateATE(gi, esti); //计算ATE RPE = calculateRPE(gi, esti); //计算RPE // DrawTrajectory(gi, esti); return 0; } vector<double> calculateATE(const TrajectoryType& gt, const TrajectoryType& esti) { double rmse_all, rmse_trans; for(size_t i = 0; i < gt.size(); i++) { //ATE旋转+平移 double error_all = (gt[i].inverse()*esti[i]).log().norm(); rmse_all += error_all * error_all; //ATE平移 double error_trans = (gt[i].inverse()*esti[i]).translation().norm(); rmse_trans += error_trans * error_trans; } rmse_all = sqrt(rmse_all / double(gt.size())); rmse_trans = sqrt(rmse_trans / double(gt.size())); vector<double> ATE; ATE.push_back(rmse_all); ATE.push_back(rmse_trans); cout << "ATE_all = " << rmse_all << " ATE_trans = " << rmse_trans << endl; } vector<double> calculateRPE(const TrajectoryType& gt, const TrajectoryType& esti) { double rmse_all, rmse_trans; double delta = 1; //delta = 2, 间隔两帧 for(size_t i = 0; i < gt.size() - delta; i++) { //RPE旋转+平移 double error_all = ((gt[i].inverse()*gt[i + delta]).inverse()*(esti[i].inverse()*esti[i + delta])).log().norm(); rmse_all += error_all * error_all; //RPE平移 double error_trans = ((gt[i].inverse()*gt[i + delta]).inverse()*(esti[i].inverse()*esti[i + delta])).translation().norm(); rmse_trans += error_trans * error_trans; } rmse_all = sqrt(rmse_all / double(gt.size())); rmse_trans = sqrt(rmse_trans / double(gt.size())); vector<double> RPE; RPE.push_back(rmse_all); RPE.push_back(rmse_trans); cout << "RPE_all = " << rmse_all << " RPE_trans = " << rmse_trans << endl; } TrajectoryType ReadTrajectory(const string& file_name) { ifstream fin(file_name); TrajectoryType trajectory; if(!fin) { cerr << "trajectory " << file_name << "not found" << endl; return trajectory; } while(!fin.eof()) { double time, tx, ty, tz, qx, qy, qz, qw; fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw; Sophus::SE3d p1(Eigen::Quaterniond(qw, qx, qy, qz), Eigen::Vector3d(tx, ty, tz)); trajectory.push_back(p1); } return trajectory; }讯享网
讯享网//结果如下: gi read total 612 esti read total 612 ATE_all = 2.20728 ATE_trans = 0.0 RPE_all = 0.0 RPE_trans = 0.0
轨迹如图,绿色的为真实轨迹,蓝色为估算轨迹。

4.evo工具
4.1 evo工具安装以及使用说明
安装参考这个帖子:https://www.guyuehome.com/18717
evo使用看这个帖子:https://blog.csdn.net/dcq/article/details/
4.2 evo中计算ATE(APE)
evo中把ATE称为APE。
高博书中的格式是数据集TUM格式,即time, tx, ty, tz, qx, qy, qz, qw
evo中默认计算平移部分,需要通过输入-r full来改为计算平移+旋转。

分别输入以下命令:
计算旋转+平移:rmse = 2., 自己写的是ATE_all = 2.20728
evo_ape tum -r full groundtruth.txt estimated.txt output max 2. mean 2. median 2. min 0. rmse 2. sse 3507.030550 std 0. 计算平移:rmse = 0.023082,自己写的是ATE_trans = 0.0
讯享网evo_ape tum groundtruth.txt estimated.txt output max 0.063891 mean 0.019498 median 0.016376 min 0.001271 rmse 0.023082 sse 0. std 0.012354
4.2 evo中计算RPE
默认为delta = 1的情况,如需更改为delta = 2,则: -r --delta 2,如下:
evo_rpe tum -r full --delta 2 groundtruth.txt estimated.txt当delta = 1时,分别输入以下命令:
计算旋转+平移:rmse = 0.078218,RPE_all = 0.0
讯享网evo_rpe tum -r full groundtruth.txt estimated.txt output for delta = 1 (frames) using consecutive pairs (not aligned) max 0. mean 0.067958 median 0.063364 min 0.005507 rmse 0.078218 sse 3. std 0.038726
计算平移:rmse = 0.031082, 自己写的是:RPE_trans = 0.0
evo_rpe tum groundtruth.txt estimated.txt output# for delta = 1 (frames) using consecutive pairs (not aligned) max 0. mean 0.025923 median 0.022008 min 0.000927 rmse 0.031082 sse 0. std 0.017148 最后,对比自己写的和evo算得还是有一点点差别。算旋转的时候会差0.1-0.2,算平移的时候比较准一点。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/58904.html