
17. 99秒马表设计
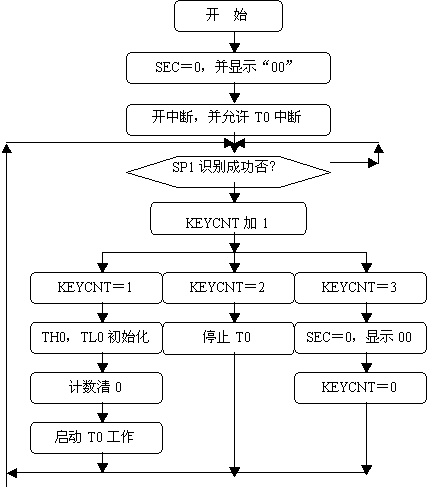
1. 实验任务
(1. 开始时,显示“00”,第1次按下SP1后就开始计时。
(2. 第2次按SP1后,计时停止。
(3. 第3次按SP1后,计时归零。
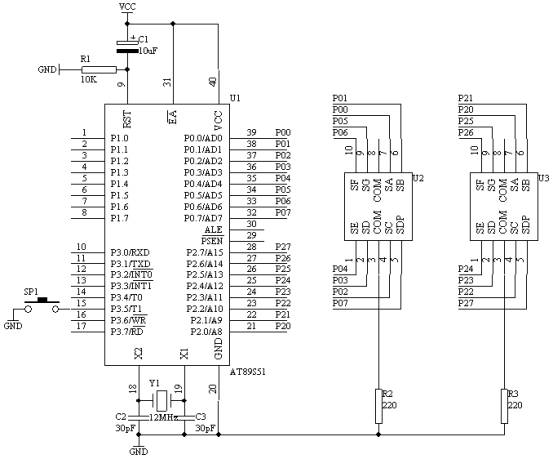
2. 电路原理图
讯享网
图4.17.1
3. 系统板上硬件连线
(1. 把“单片机系统”区域中的P0.0/AD0-P0.7/AD7端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P0.0/AD0对应着a,P0.1/AD1对应着b,……,P0.7/AD7对应着h。
(2. 把“单片机系统”区域中的P2.0/A8-P2.7/A15端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P2.0/A8对应着a,P2.1/A9对应着b,……,P2.7/A15对应着h。
(3. 把“单片机系统“区域中的P3.5/T1用导线连接到”独立式键盘“区域中的SP1端口上;

4. 程序框图
T0中断服务程序框图
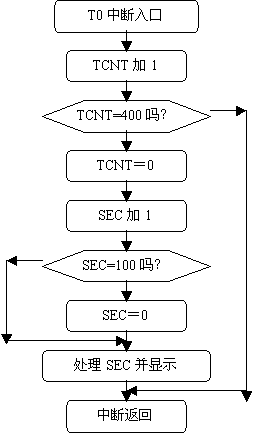
图4.17.2
5. 汇编源程序
TCNTA EQU 30H
TCNTB EQU 31H
SEC EQU 32H
KEYCNT EQU 33H
SP1 BIT P3.5
ORG 00H
LJMP START
ORG 0BH
LJMP INT_T0
START: MOV KEYCNT,#00H
MOV SEC,#00H
MOV A,SEC
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P2,A
MOV TMOD,#02H
SETB ET0
SETB EA
WT: JB SP1,WT
LCALL DELY10MS
JB SP1,WT
INC KEYCNT
MOV A,KEYCNT
CJNE A,#01H,KN1
SETB TR0
MOV TH0,#06H
MOV TL0,#06H
MOV TCNTA,#00H
MOV TCNTB,#00H
LJMP DKN
KN1: CJNE A,#02H,KN2
CLR TR0
LJMP DKN
KN2: CJNE A,#03H,DKN
MOV SEC,#00H
MOV A,SEC
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P2,A
MOV KEYCNT,#00H
DKN: JNB SP1,$
LJMP WT
DELY10MS:
MOV R6,#20
D1: MOV R7,#248
DJNZ R7,$
DJNZ R6,D1
RET
INT_T0:
INC TCNTA
MOV A,TCNTA
CJNE A,#100,NEXT
MOV TCNTA,#00H
INC TCNTB
MOV A,TCNTB
CJNE A,#4,NEXT
MOV TCNTB,#00H
INC SEC
MOV A,SEC
CJNE A,#100,DONE
MOV SEC,#00H
DONE: MOV A,SEC
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P2,A
NEXT: RETI
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
6. C语言源程序
#include <AT89X51.H> unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f, 0x66,0x6d,0x7d,0x07, 0x7f,0x6f,0x77,0x7c, 0x39,0x5e,0x79,0x71,0x00}; unsigned char second; unsigned char keycnt; unsigned int tcnt; void main(void) { unsigned char i,j; TMOD=0x02; ET0=1; EA=1; second=0; P0=dispcode[second/10]; P2=dispcode[second%10]; while(1) { if(P3_5==0) { for(i=20;i>0;i--) for(j=248;j>0;j--); if(P3_5==0) { keycnt++; switch(keycnt) { case 1: TH0=0x06; TL0=0x06; TR0=1; break; case 2: TR0=0; break; case 3: keycnt=0; second=0; P0=dispcode[second/10]; P2=dispcode[second%10]; break; } while(P3_5==0); } } } } void t0(void) interrupt 1 using 0 { tcnt++; if(tcnt==400) { tcnt=0; second++; if(second==100) { second=0; } P0=dispcode[second/10]; P2=dispcode[second%10]; } }讯享网
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/38733.html