

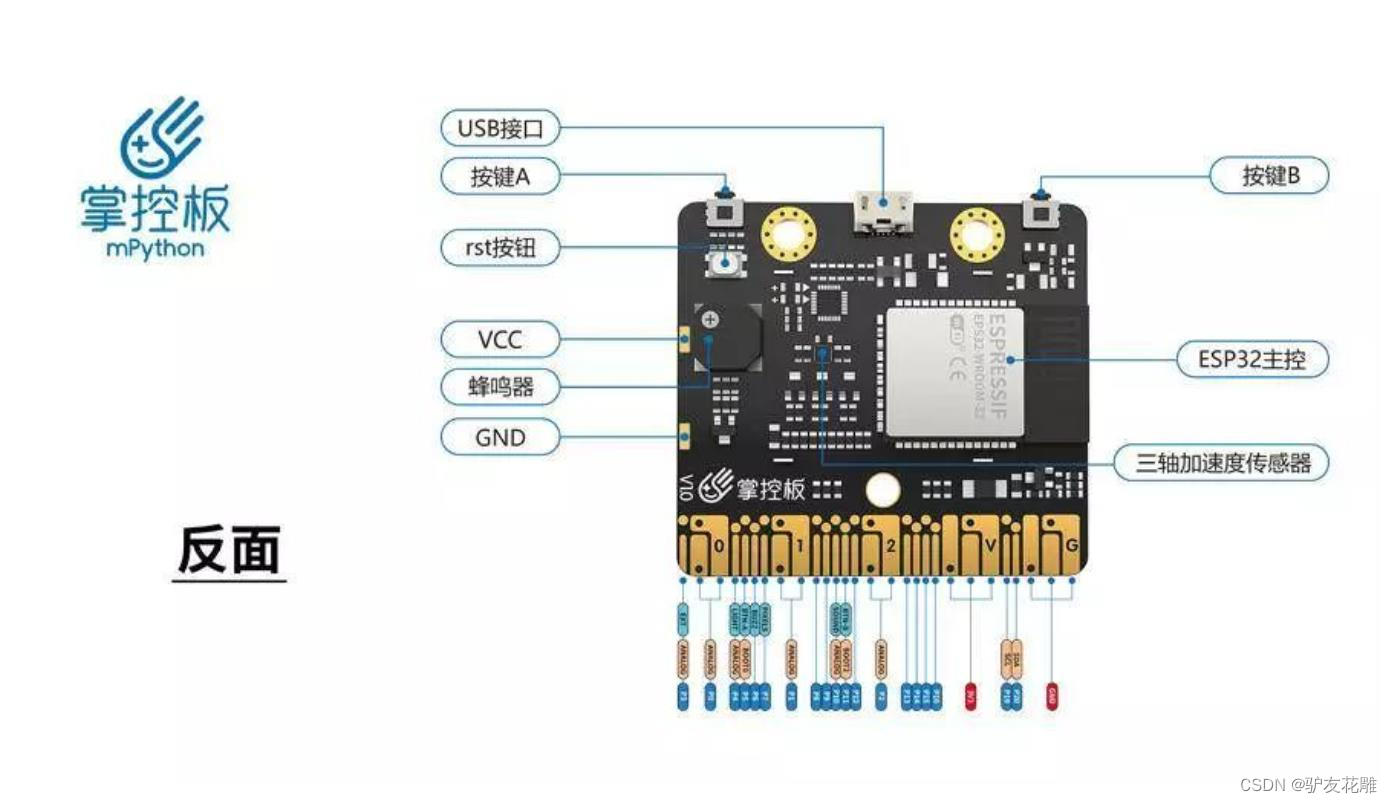
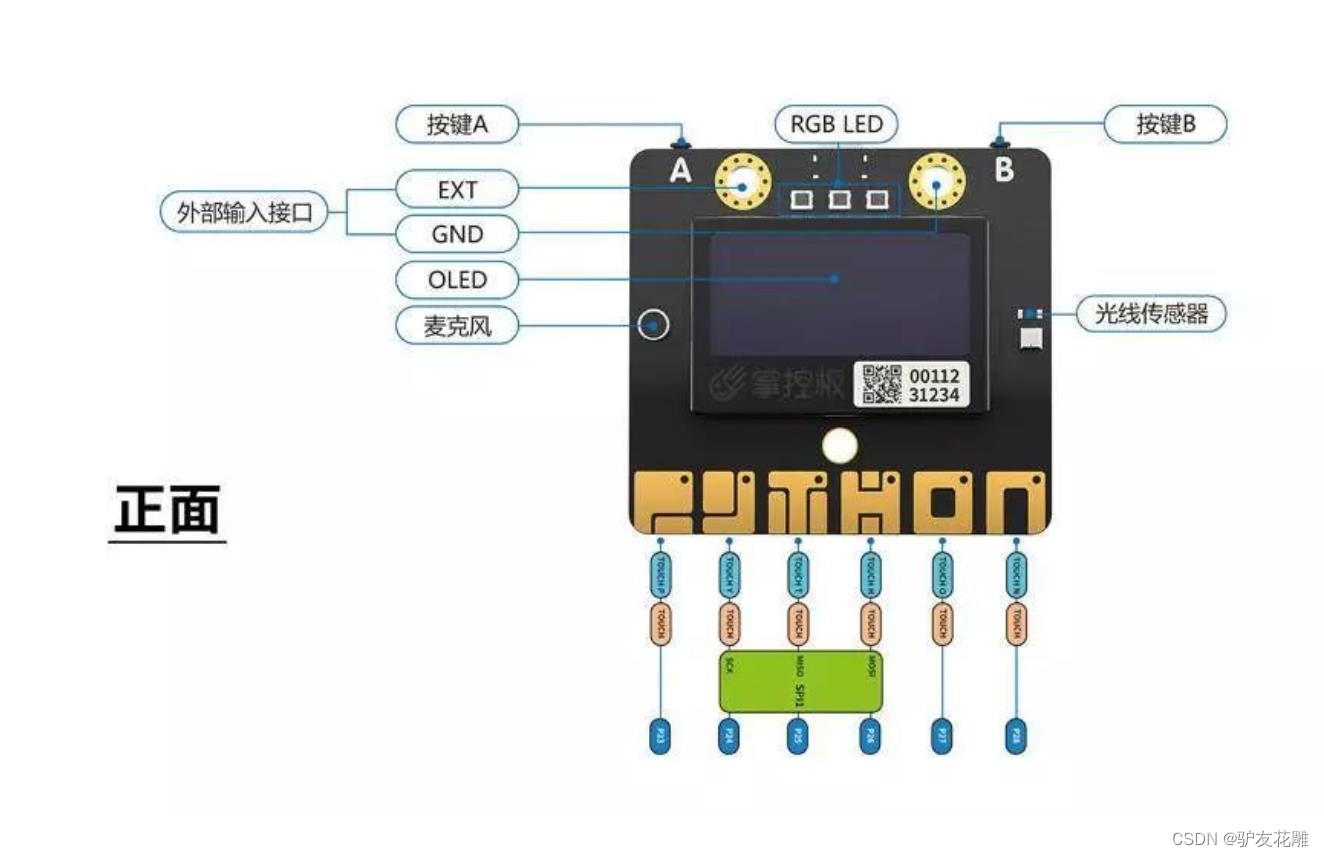
掌控板硬件特性:
ESP-32主控
处理器:Tensilica LX6双核处理器(一核处理高速连接;一核独立应用开发)
主频:高达240MHz的时钟频率
SRAM:520KB
Flash:8MB
Wi-Fi标准:FCC/CE/TELEC/KCC
Wi-Fi协议:802.11 b/g/n/d/e/i/k/r (802.11n,速度高达150 Mbps),A-MPDU和A-MSDU聚合,支持0.4us防护间隔
频率范围:2.4~2.5 GHz
蓝牙协议:符合蓝牙v4.2 BR/EDR和BLE标准
蓝牙音频:CVSD和SBC音频低功耗:10uA
供电方式:Micro USB供电
工作电压:3.3V
最大工作电流:200mA
最大负载电流:1000mA
掌控板载
三轴加速度计MSA300,测量范围:±2/4/8/16G
地磁传感器MMC5983MA,测量范围:±8 Gauss;精度0.4mGz,电子罗盘误差±0.5°
光线传感器
麦克风
3 颗全彩ws2812灯珠
1.3英寸OLED显示屏,支持16*16字符显示,分辨率128x64
无源蜂鸣器
支持2个物理按键(A/B)、6个触摸按键
支持1路鳄鱼夹接口,可方便接入各种阻性传感器
拓展接口
20通道数字I/O, (其中支持12路PWM,6路触摸输入)
5通道12bit模拟输入ADC,P0~P4
1路的外部输入鳄鱼夹接口:EXT/GND
支持I2C、UART、SPI通讯协议


掌控拓展板(parrot)是掌控板衍生的一款体积小巧、易于携带的拓展板。支持电机驱动、语音播放、语音合成等功能的IO引脚扩展板,可扩展12路IO接口和2路I2C接口。

技术参数
该板具有以下特性:
两路DC马达驱动,单路电流150mA
支持音频功放和喇叭输出(掌控板P8,P9引脚)
支持文字转语音(Text To Speech)的语音合成
扩展12路IO接口、2路I2C接口
体积小巧、便携,易于携带
支持锂电池供电和外接USB电源供电两种方式
内置330mAH锂电池,支持锂电池循环充电
工作电压:3.3V
最大输出电流: 1A@3.3V
充电电流: 最大170mA


快递刚到,为做系列实验,特入手了二套拓展板掌控宝(带350ma电池)


组装好是这样的



电源指示灯状态:
v1版本
电源输出指示功能: 3.3V输出,指示灯亮;无输出则灭。
v2版本
电源输出指示功能: 3.3V输出,指示灯亮;无输出则灭。
电池电量指示功能: 通过闪烁次数反馈电量,4档电量显示。
充电指示灯状态:
v1版本
注意:只能在电源开关打开下,才能指示充电放电状态。
充电指示功能: 充电中,指示灯亮;充满,指示灯熄灭;
放电指示功能: 通过指示灯闪烁次数来反馈电池电量。频率越快电量越低,电量满时,常亮。
v2版本
充电指示功能: 充电中,指示灯闪烁;充满,指示灯熄灭;
VCC: VCC电源区别与其他3.3V电压电源。提供3.3V以上更高的电压和更大的电流驱动。用于应付较大的驱动需求。电源路径管理,当没接USB充电时,VCC由电池电压直接提供;接上USB充电时,VCC由USB提供电源。

掌控宝功能说明

电机驱动
掌控拓展板支持2路的PWM电机驱动(掌控拓展板背面标记M1和M2),你可以接入直流电机马达(如TT马达、N20)和LED灯(满天星灯带)
I/O
掌控拓展板左右两侧扩展出12路I/O接口、2路I2C接口。可以通过这些接口接入经典的传感器输入模块,输出模块。例如:按键、人体红外、超声波、LED、马达、蜂鸣器、数码管… 拓展板扩展引脚有P0、P1、P2、P3、P5、P6、P7、P11、P13、P14、P15、P16、P19(SCL)、P20(SDA)
重要
由于P5、P11是掌控板的按键A、B的IO引脚,为避免冲突,限定拓展板的P5、P11引脚只能用于数字电平输入,且拓展板会对输入电平进行翻转。在使用时,须重点注意!
喇叭—音频播放
掌控拓展板内置喇叭,支持音频播放。
语音合成(TTS)
将文本转化为文字,让机器能够说话。这样就可以给掌控板添上“嘴巴”。比如在程序内输入你想要说话的内容,让它说给你听。
Python库
parrot 模块 : 用于电机驱动功能
audio 模块 : 用于音频播放功能
1、通过音频模块播放网络歌曲
#MicroPython动手做(24)——掌控板之拓展掌控宝 #通过音频模块播放网络歌曲(掌控宝内置喇叭) from mpython import * import network import audio import time my_wifi = wifi() my_wifi.connectWiFi("zh", "zy1567") audio.player_init() audio.set_volume(70) audio.play("http://wiki.labplus.cn/images/4/4e/Music_test.mp3") while True: oled.fill(0) oled.DispChar("播放网络歌曲", 30, 16, 1) oled.DispChar("春天在哪里", 35, 32, 1) oled.show() rgb[1] = (int(0), int(51), int(0)) rgb.write() time.sleep_ms(1) 讯享网
mPython X 图形编程


2、拓展掌控宝的元件布局


3、拓展掌控宝驱动电机函数
拓展板支持2路的PWM电机驱动,可以使用直流电机马达,如TT马达、N20等。
(1)首先导入parrot模块:
讯享网import parrot
(2)M1、M2,正转速度设为80:
import parrot # 导入parrot 模块 parrot.set_speed(parrot.MOTOR_1,80) # 设置M1正转,速度为80 parrot.set_speed(parrot.MOTOR_2,80) # 设置M2正转,速度为80 (3)反转:
讯享网parrot.set_speed(parrot.MOTOR_1,-80) # 设置M1反转,速度为80 parrot.set_speed(parrot.MOTOR_2,-80) # 设置M2反转,速度为80
(4)停止:
parrot.set_speed(parrot.MOTOR_1,0) # 停止 parrot.set_speed(parrot.MOTOR_2,0) # 停止 控制电机速度使用到函数 set_speed(motor_no, speed) 。motor_no 参数为电机编号,可选编号常量有 MOTOR_1 、MOTOR_2 。 speed 参数为速度,范围-100~100,正值表示正转,负值时表示负转。 当某些时候需要知道当前设置的速度值时,你可以用 get_speed(motor_no) 返回当前电机速度。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/33955.html