
近日,GitHub上一个名为AERIS-10的开源相控阵雷达项目引发科技社区广泛关注,该项目已累计获得超过12,000个Star。
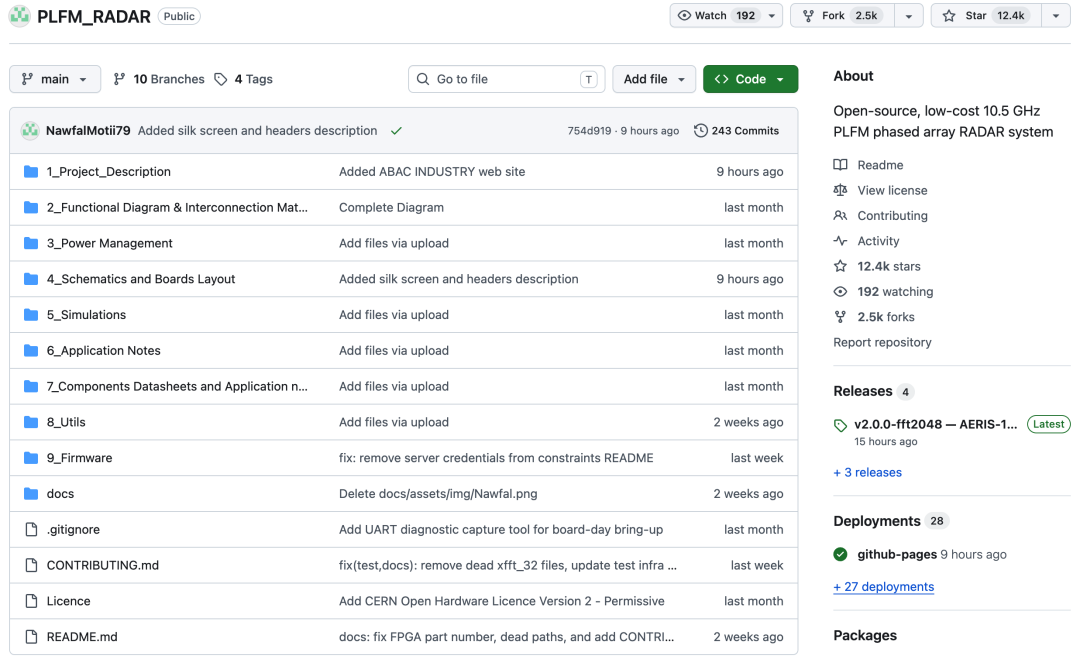
这套系统基于10.5 GHz频段,采用脉冲线性频率调制(PLFM)技术,标志着专业级雷达技术首次以完全开源的形式向公众开放,为无人机开发者、高校研究人员和电子爱好者提供了一套低成本的雷达实验平台。
AERIS-10提供两种配置版本以适应不同需求。Nexus版本采用8×16贴片天线阵列,探测距离可达3公里,适合教育实验和近距离目标追踪;Extended版本则配备32×16介质填充缝隙波导天线阵列,通过16通道10瓦GaN功率放大器将探测距离扩展至20公里,适用于无人机监测、小型飞行器预警等对距离要求更高的场景。
两个版本均支持±45°的电子波束转向,配合360°机械扫描能力,实现了全向空间覆盖。
该系统的硬件设计采用模块化思路,核心由电源管理板、频率合成器板和主控板三部分组成。主控板集成Xilinx XC7A50T FPGA和STM32F746微控制器双处理器架构,其中FPGA负责雷达信号处理的核心计算任务,包括脉冲压缩、多普勒FFT、动目标检测(MTI)和恒虚警率(CFAR)处理;STM32则承担系统管理职责,处理电源时序控制、GPS/IMU数据融合以及步进电机驱动等功能。

射频前端采用ADI公司的ADAR1000四通道移相器配合ADTR1107收发芯片,构建16单元相控阵架构。频率合成部分选用AD9523-1低抖动时钟发生器,为ADC、DAC和频率合成器提供相位对齐的时钟基准,确保系统相干性。这种高度集成化的设计方案使得整套系统的复杂度大幅降低,便于爱好者理解和复现。
项目在授权策略上进行了专业区分:硬件设计文件采用CERN-OHL-P(欧洲核子研究组织开放硬件许可证第二版——宽松型),这是目前业界公认的专业开源硬件协议,明确规定了硬件文档、产品和专利相关条款;软件代码则采用MIT许可证,给予开发者最大程度的自由度。这一安排既保护了硬件贡献者的权益,又促进了软件生态的繁荣发展。
项目仓库提供了完整的工程资料,包括原理图、PCB布局、Gerber文件、BOM清单、FPGA固件以及基于Python的图形界面软件。用户可通过GUI实时查看目标位置,界面集成了地图显示功能,并支持GPS和IMU数据的实时姿态修正。

传统相控阵雷达因其高昂的研制成本和复杂的技术门槛,长期以来仅限于军用和高端民用领域。AERIS-10的出现打破了这一格局,通过开源硬件模式将雷达技术带入创客社区。项目作者表示,其目标是“让雷达技术民主化”,使大学研究团队、无人机创业公司和资深电子爱好者都能获得实验相控阵雷达的平台。
目前该项目处于Alpha开发阶段,作者正在积极寻求射频工程师、FPGA开发者和测试用户的参与。随着项目的持续完善,开源雷达技术有望在无人机避障、气象观测、小型交通监控等领域找到更多应用场景。
参考链接
- https://github.com/NawfalMotii79/PLFM_RADAR
- https://NawfalMotii79.github.io/PLFM_RADAR/docs/
- https://ohwr.org/cern_ohl_p_v2.txt

🔥免费报名(点击文末“阅读原文”直达)oschina.net/event/
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/271182.html