
最近我希望在 Jetson 上部署一个本地 Openclaw,并通过飞书机器人进行远程交互,从而让闲置的边缘设备秒变我的高级AI助手。整体目标很简单:
- 在 Jetson 上运行 OpenClaw
- 接入自己的模型 API(我使用的是阿里的Coding Plan)
- 通过飞书群聊 或者私聊机器人直接调用本地 Agent
最终希望实现这样的工作流:
这篇文章记录一下从源码部署 OpenClaw,到接通飞书机器人的完整过程,以及过程中踩到的几个关键坑。
本文使用环境如下:
Jetson 环境
GPT plus 代充 只需 145
说明
当前平台为:
- Jetson ARM64
- Ubuntu 20.04
- CUDA 11.4
这点很重要,因为后续某些依赖在 ARM64 + Ubuntu 20.04 上会遇到额外兼容性问题。
OpenClaw 是一个 Node.js 项目,因此首先需要准备 Node 环境。
建议使用 Node 22。
还需要安装 :
GPT plus 代充 只需 145
安装后检查:
这一步非常重要。
如果不配置 ,后面可能出现这些问题:
- 报错
- OpenClaw 自动构建 UI 时提示找不到 pnpm
- 全局命令不可用
建议将下面内容加入 :
GPT plus 代充 只需 145
保存后执行:
再验证:
GPT plus 代充 只需 145
我在安装过程中遇到的典型报错是:
GPT plus 代充 只需 145
因此需要手动升级 CMake。
安装新版 CMake
检查版本:
GPT plus 代充 只需 145
如果系统仍然找不到新版本,可临时加入 PATH:
必要时可以加入 。
在项目目录执行:
GPT plus 代充 只需 145
如果安装过程中出现原生模块编译问题,优先检查:
- CMake 版本
- build-essential 是否安装
- pnpm 是否在 PATH 中
OpenClaw 通过 进行配置。
如果目录不存在,先创建:
这是本文里一个非常关键的坑。
OpenClaw 的架构不是“CLI 直接调用模型”,而是:
GPT plus 代充 只需 145
所以 CLI 其实是 Gateway 的客户端。
既然是客户端连接服务端,就涉及认证。
为什么要加 token
如果只配置服务端 token,而没有配置客户端 token,就会出现:
因此需要让 gateway 服务端 和 客户端连接配置 使用同一个 token。
通过 进行知道如下,推荐配置如下:
GPT plus 代充 只需 145
解释
- :Gateway 服务端认证 token
- :CLI / TUI / logs 等客户端连接 Gateway 时使用的 token
这两个必须一致。
先安装 gateway service:
然后启动:
GPT plus 代充 只需 145
检查状态:
正常情况下会看到类似输出:
GPT plus 代充 只需 145
如果配置修改过,需要重启:
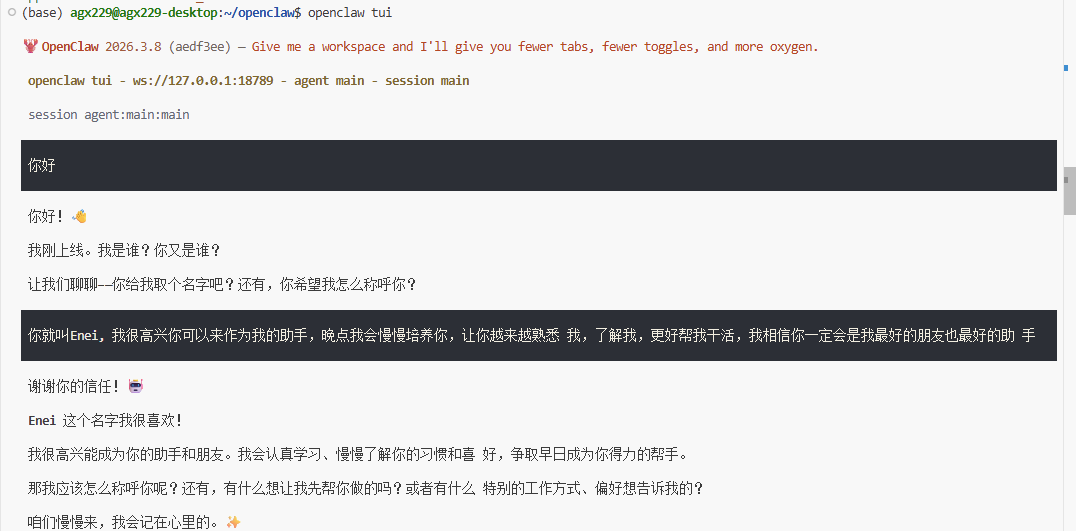
如果配置正确,可以直接运行:
GPT plus 代充 只需 145
若成功,界面会显示已连接,并能直接与模型对话。
如果出现 token mismatch,基本就是 和 不一致。
第一步:创建飞书应用
进入飞书开放平台https://open.feishu.cn/?lang=zh-CN,创建一个企业自建应用。

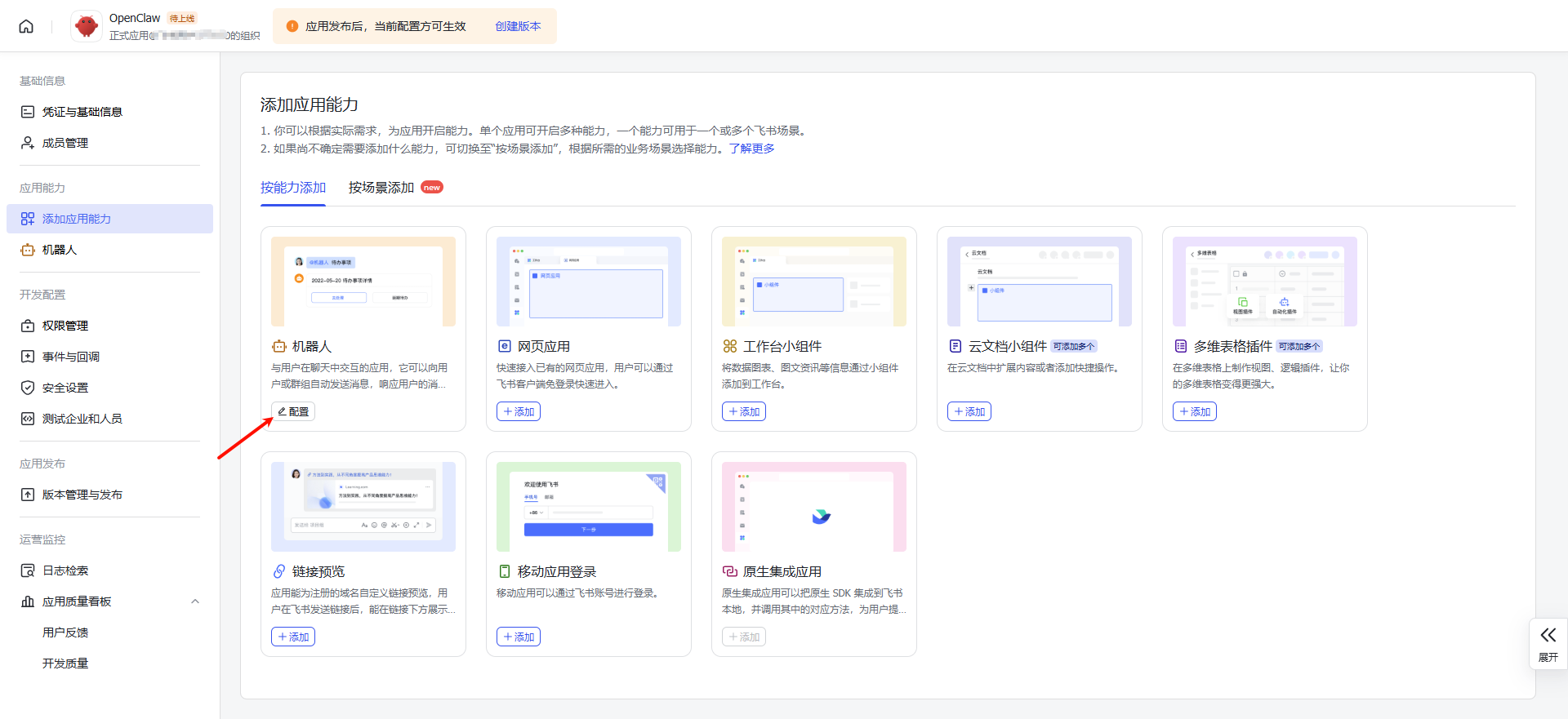
第二步:启用机器人能力
在应用后台启用机器人。


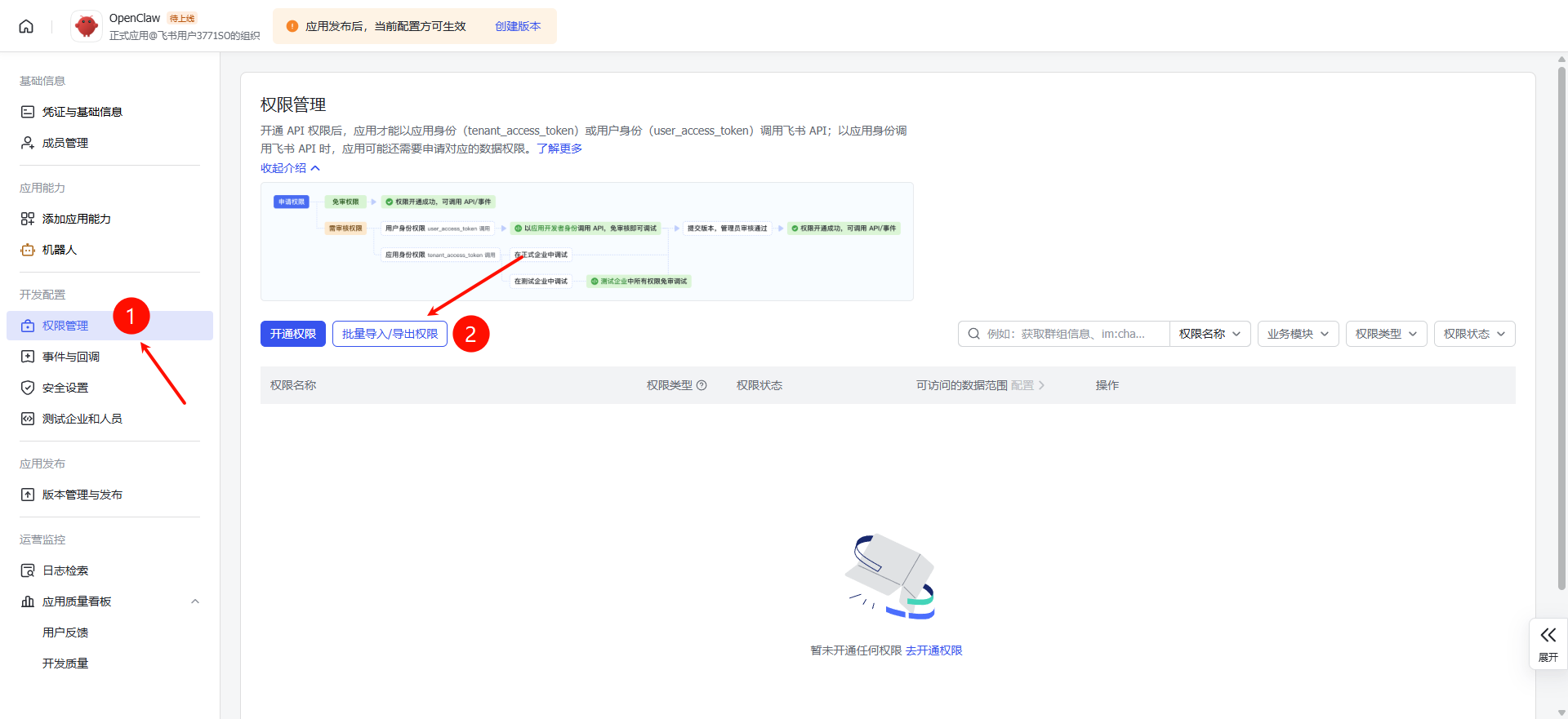
第二步:配置权限
在左侧目录树选择“开发配置 > 权限管理”,单击“批量导入/导出权限”按钮。
加入如下内容:
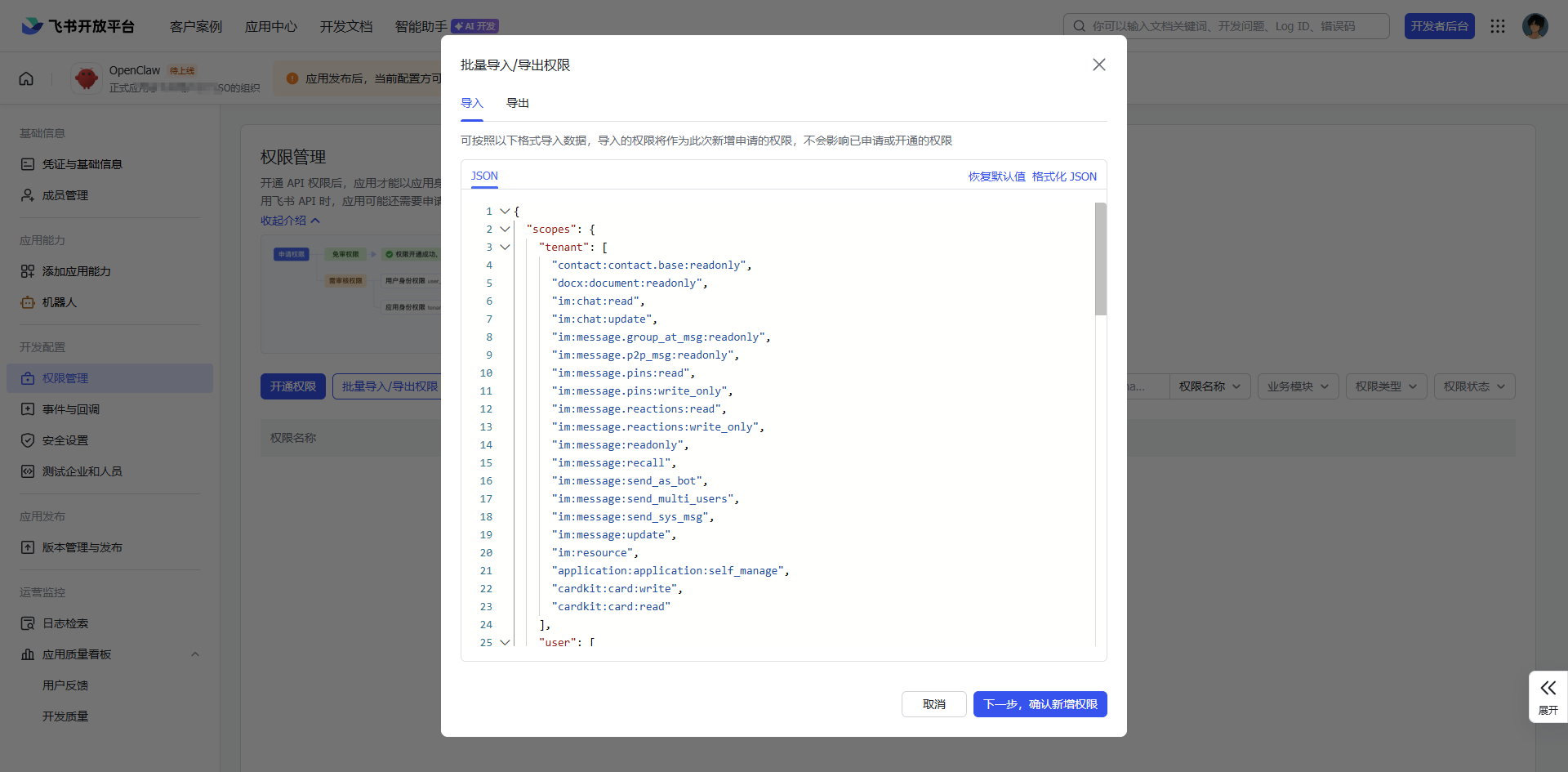
在弹窗中确认权限无误后,单击“申请开通”按钮,完成操作。

第三步:发布应用


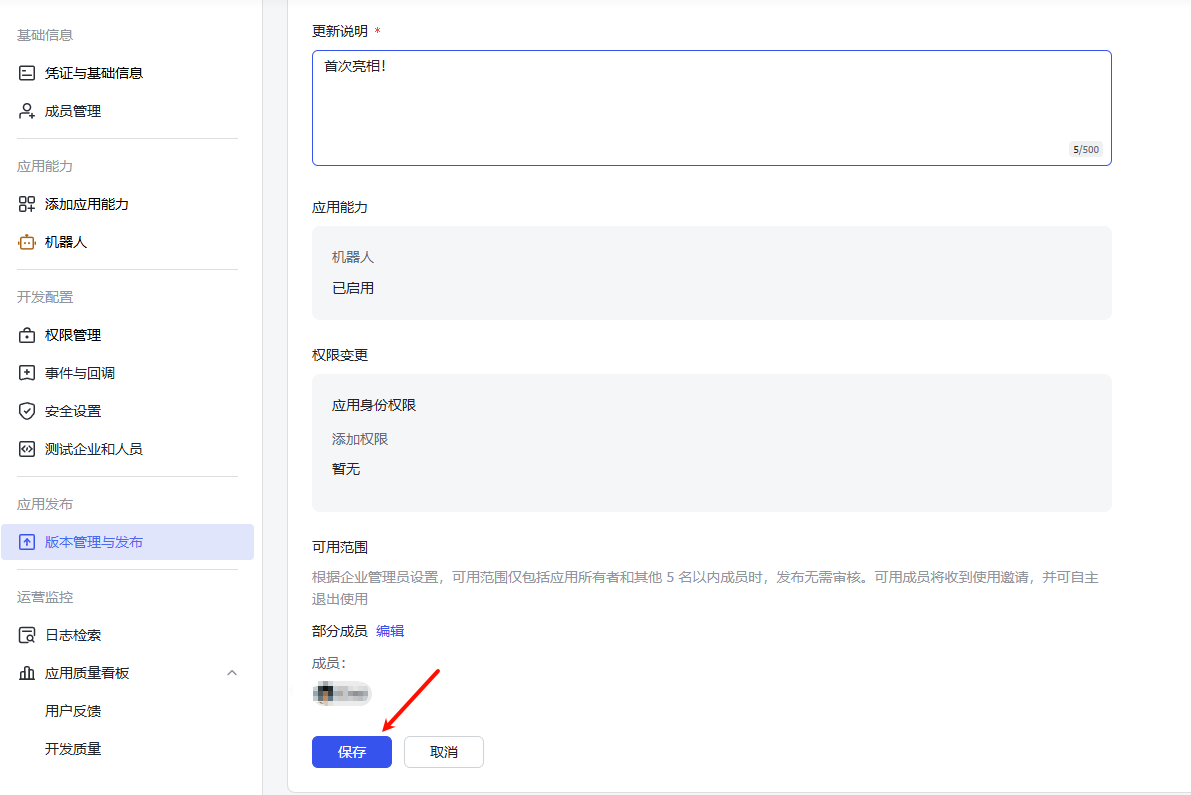
到此就可以回来Jetson去连接我们的飞书机器人了
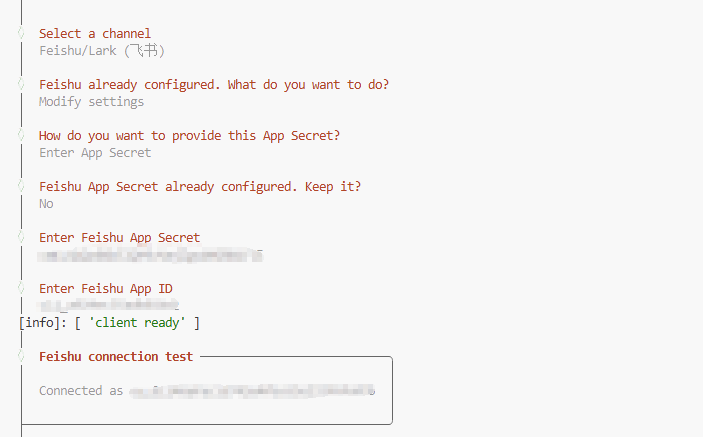
第四步:配置 Feishu Channel
运行:
GPT plus 代充 只需 145
选择:
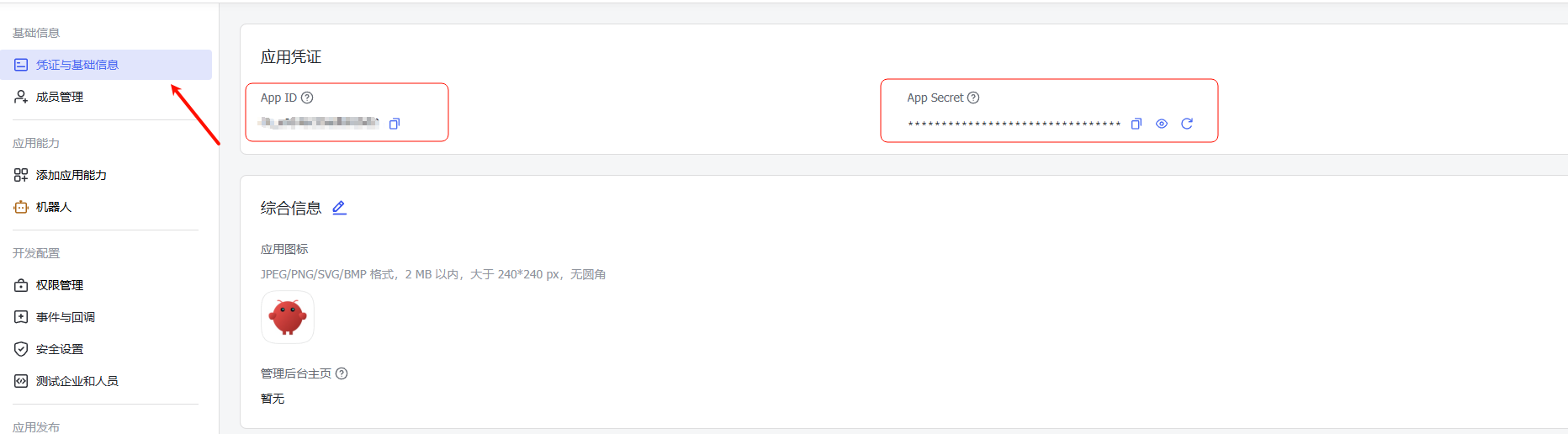
然后输入:
- App ID
- App Secret
具体过程可以选项可以参考我的
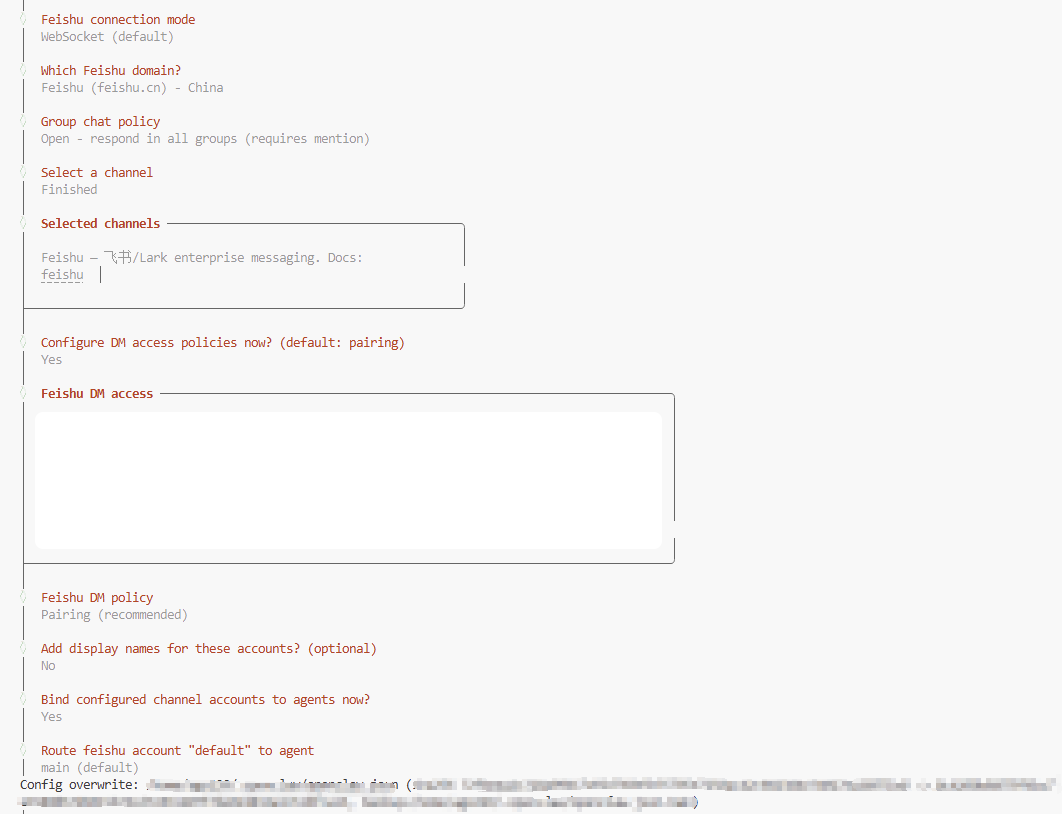
到此就基本完成了openclaw与飞书机器人的连接了,但是要实现聊天还得再继续配置。
第五步:重启Gateway
GPT plus 代充 只需 145
第六步:配置事件与回调
选择:
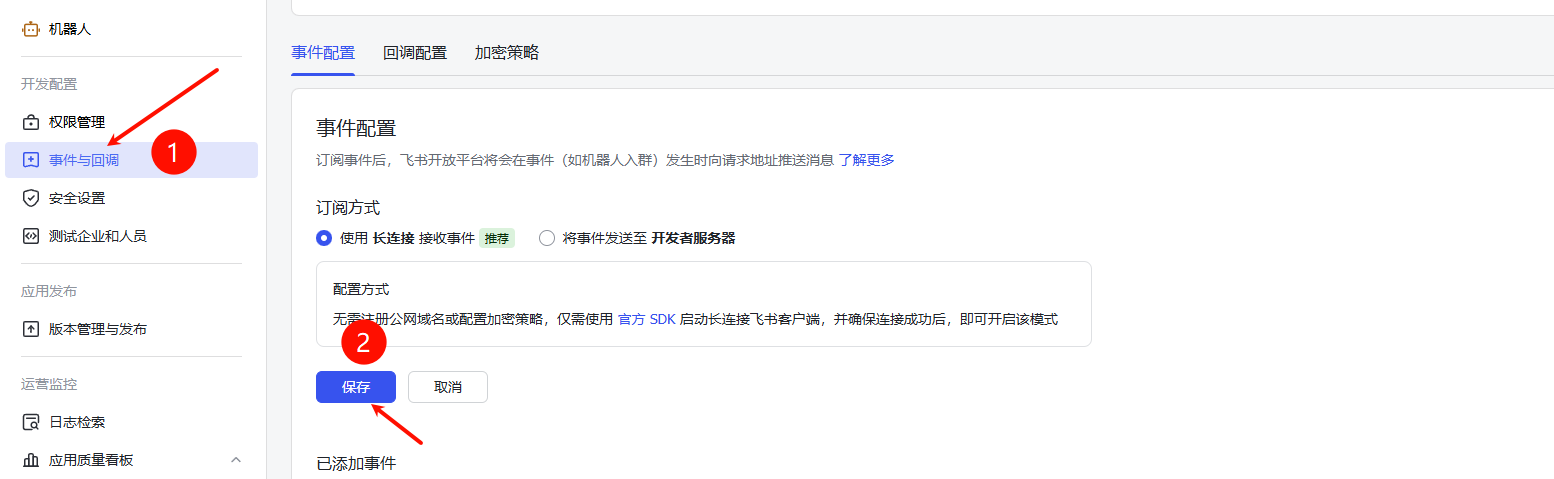
然后添加事件:
GPT plus 代充 只需 145
这是机器人接收消息所必需的事件。


继续配置回调

添加回调

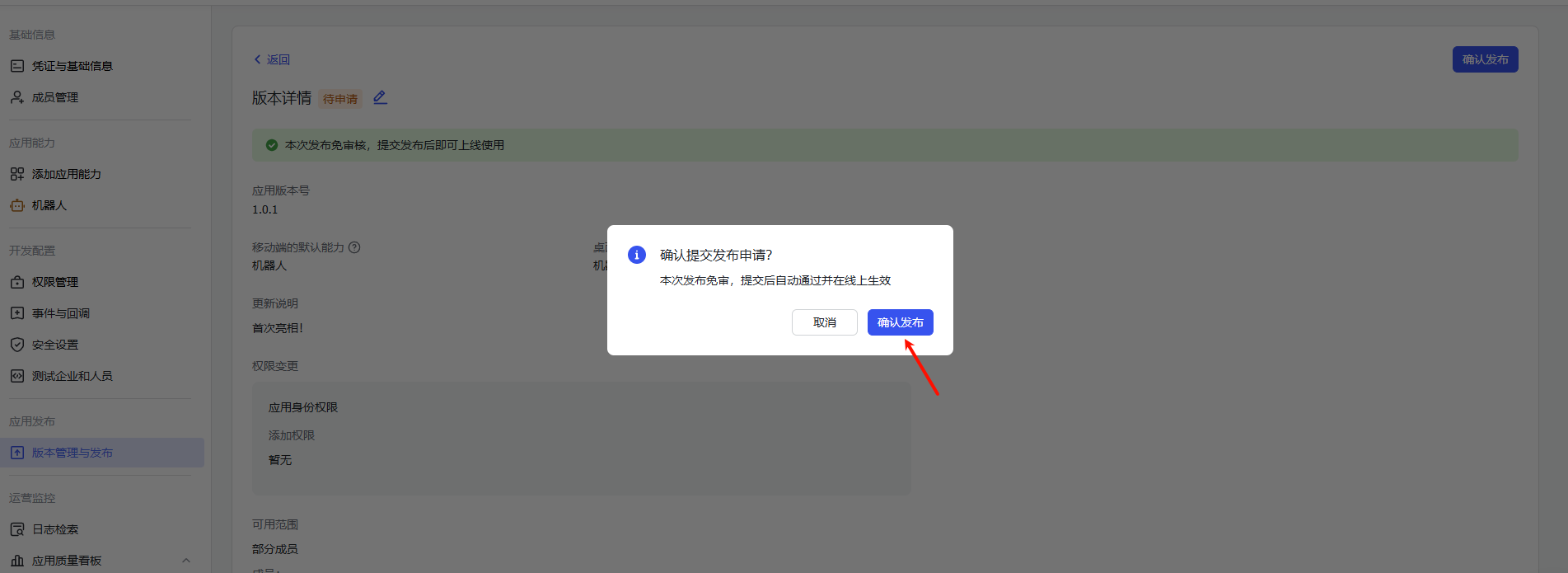
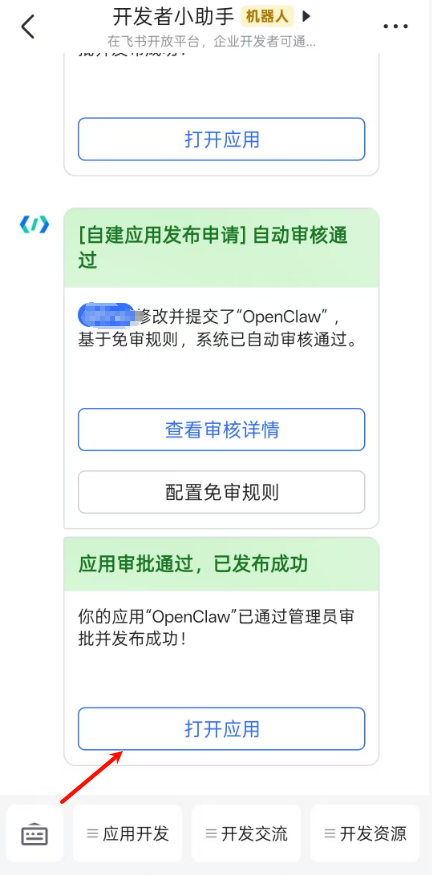
第七步:发布应用版本
这一步非常关键。(这里参考第三步)
很多时候飞书应用配置改了但机器人无效,就是因为没有发布版本。
进入:
创建版本并发布。
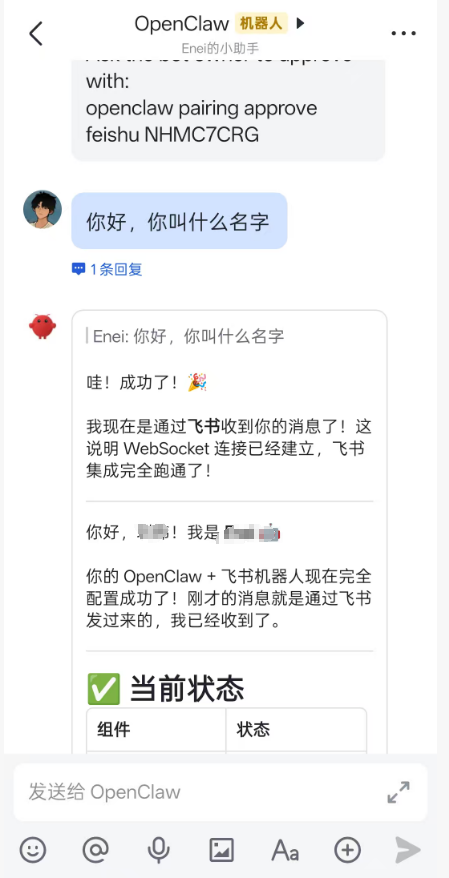
第八步:配置私聊飞书机器人
在飞书APP中找到开发者小助手
之后给机器人发送任何信息
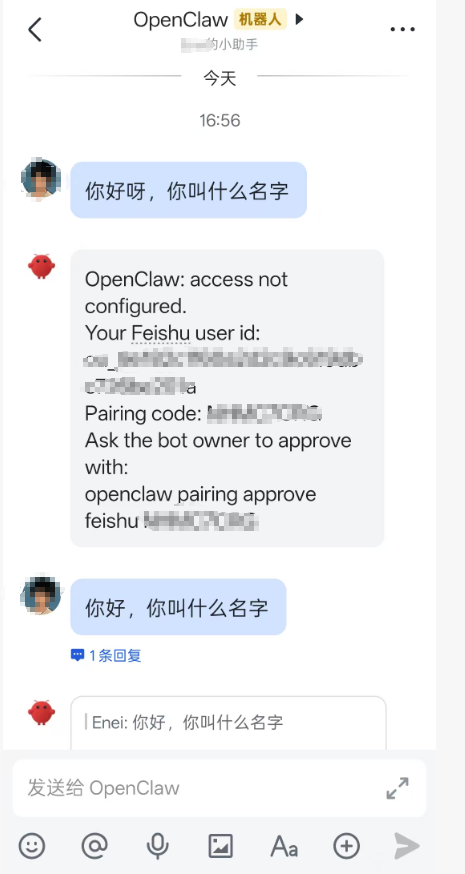
将Pairing code复制然后在Jetson终端输入
GPT plus 代充 只需 145
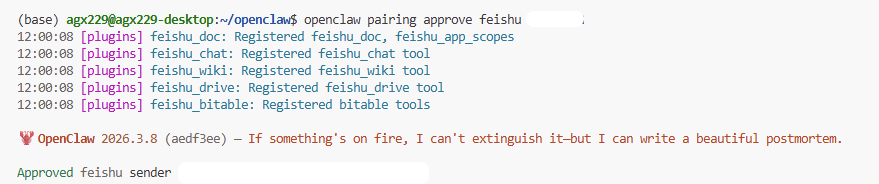
到此,基本就实现了在飞书中直接召唤我们边缘设备干活了,回到飞书,与我们小助手聊天即可。
坑 1:Jetson 上 CMake 版本过低
会导致依赖编译失败。
坑 2:没有配置 pnpm PATH
会导致全局命令或 UI 构建异常。
坑 3:误以为需要单独安装 Feishu 插件
源码版已经内置,不需要重复安装。
坑 4:没有配置
会导致 CLI 连接 Gateway 时出现 token mismatch。
坑 5:App ID / App Secret 使用了旧应用凭证
这是我这次飞书始终接不通的根因。
坑 6:飞书应用修改后未发布版本
会导致机器人看似配置好了,但实际不生效。
完成上述配置后,可以实现:
- 在 Jetson 上运行 OpenClaw Gateway
- 接入自己的模型 API
- 在飞书群中
- 机器人调用本地 Agent 并返回回复
这为后续扩展提供了很好的基础,例如:
- 远程查询 Jetson 状态
- 执行自动化任务
- 调用机器人系统接口
- 通过飞书统一管理实验设备
这次在 Jetson 上部署 OpenClaw 并接入飞书机器人的过程,整体并不算复杂,但有几个坑非常容易卡住:
- ARM 平台的依赖编译问题
- pnpm 环境变量问题
- Gateway token 机制
只要把这些关键点处理好,OpenClaw + 飞书这套链路其实是很顺的。
如果你也想在 Jetson 上搭一个可远程交互的本地 Agent,这套方案很值得尝试。
预告一下,下一期我将更新一下好用的Skills,让我们边缘设备更好的给我们干活!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/236041.html