
1.概念
1.1 ME
1.2 MC
2. 应用场景
2.1 视频编码
2.2 视频插帧
获得运动矢量后估计中间帧,与压缩不同,插帧需要对矢量处理到一半左右,不同方法具体操作不同。
24帧到60帧的插帧方式为单数后插一帧,双数后插两帧
30帧到60帧的插帧方式为每帧后插一帧
2.2.1 电影24帧为什么比游戏30帧看着流畅
2.2.2 插帧其他方法
2.3 视频超分辨率重建
2.4 轨迹追踪
主要使用稀疏光流,详见下文LK算法
2.5 视频行为识别
https://blog.csdn.net/elaine_bao/article/details/
3. 传统ME算法
由于MEMC中精准运动矢量的估计是至关重的,因此ME的研究相对较多。
3.1 块匹配 block-matching algorithm (BMA)
3.1.1 概念
应用场景
在H.264和MPEG中广泛采用,一般将RGB转为YCbCr通道,然后分别进行匹配。
基本思想
基本思想是将图像序列的每一帧分成许多互不重叠的宏块,并认为宏块内所有象素的位移量都相同,然后对每个宏块到参考帧某一给定特定搜索范围内根据一定的匹配准则找出与当前块最相似的块,即匹配块,匹配块与当前块的相对位移即为运动矢量。
缺点
在块之间引入的非连续性,通常称为块效应。
当高频分量较大时,会引起振铃效应。
3.1.2 匹配准则
- 绝对误差和(SAD, Sum of Absolute Difference)准则;
- 均方误差(MSE, Mean Square Error)准则
- 归一化互相关函数(NCCF, Normalized Cross Correlation Function)准则。
3.1.3 搜索策略-全局匹配
3.1.4 搜索策略-快速匹配
该方法按照一定的数学规则进行匹配块的搜索。这一方法的好处是速度快,坏处是可能只能得到次**的匹配块。
3.1.4.1 三步法(Log 搜索法)
类似corase-to-fine,搜索窗口逐次减半,每次在上轮最优的基础上继续。
https://blog.csdn.net/weixin_/article/details/
3.1.4.2 新三步法、精简三步法、四步法
详细查看 https://blog.csdn.net/u0/article/details/
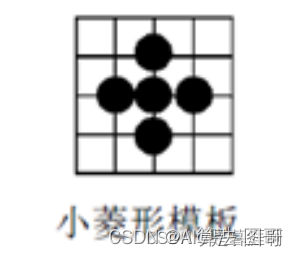
3.1.4.3 菱形搜索法(DIA)
又称钻石匹配法,按如下模板搜索,如果小于阈值停止,否则以最小点为中心继续搜索。

3.1.4.4 六边形搜索算法(HEX)
3.1.4.5 非对称十字型多层次六边形格点搜索算法(UMH)
3.1.4.6 连续消除法(ESA、TESA)
是一种全搜索算法,它对搜索区域内的点进行光栅式搜索,逐一计算并比较。
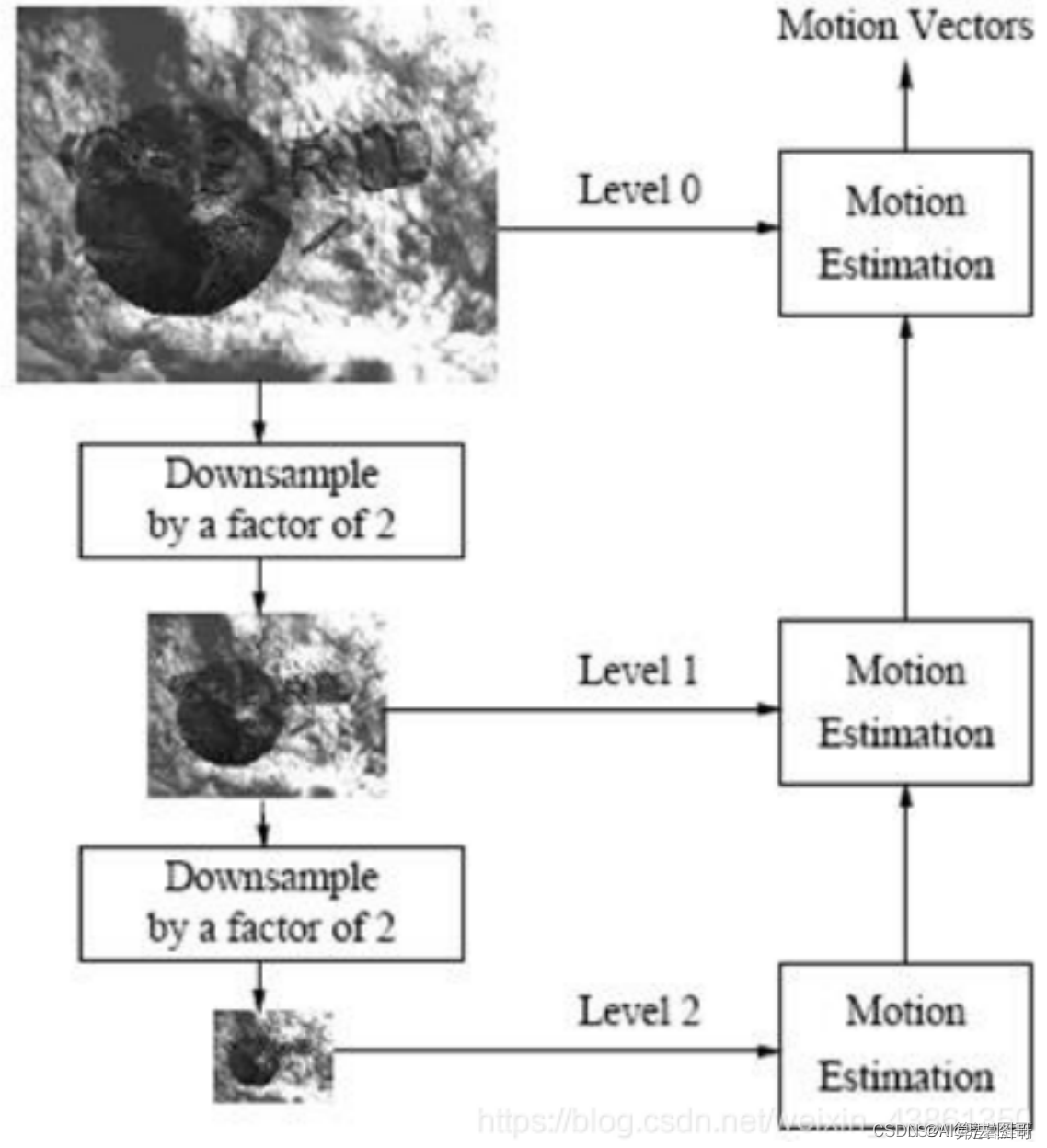
3.1.4.6 分层搜索
为解决大位移问题,提出利用图像金字塔,先搜索小图像尺寸,然后逐层优化。
3.1.4.7 其他
主要从以下几个方面着手:
- 预测搜索起点
- 中止判别条件
- 搜索模板的选择
3.1.4.8 结果对比
采用了“Foreman”(运动剧烈)、“Carphone”(中等运动)、“Claire”(运动较小)几个视频作为实验素材,搜索范围为设置为16,实验的结果如下表所示。
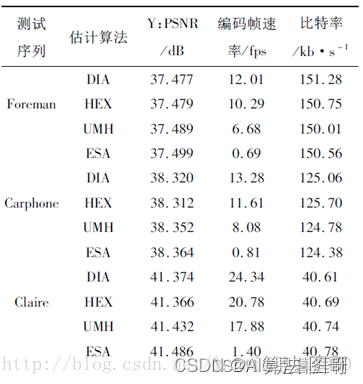
依旧来自雷神 https://blog.csdn.net/leixiaohua1020/article/details/
3.2 像素递归 pel-recursive algorithm (PRA)
对每一个像素的位移进行估计,很耗时,一般不常用。
3.3 基于能量法(频率法)
基于能量的方法又称为基于频率的方法,在使用该类方法的过程中,要获得均匀流场的准确的速度估计,就必须对输入的图像进行时空滤波处理,即对时间和空间的整合,但是这样会降低光流的时间和空间分辨率。基于频率的方法往往会涉及大量的计算,另外,要进行可靠性评价也比较困难。
3.4 光流法
3.4.1 概念
光流、光流场、光流法一文讲清 https://blog.csdn.net/_/article/details/
光流–LK光流–基于金字塔分层的LK光流–中值流 https://blog.csdn.net/sgfmby1994/article/details/
代码实现 https://zhuanlan.zhihu.com/p/
3.4.2 Lucas-Kanade算法
是一种经典的稀疏光流估计算法,该算法为1981年由Lucas和Kanade两位科学家提出的。算法做出了三个假设
- 亮度恒定
- 时间持续性(微小移动)
- 空间一致性
三个基本假设中前两个是光流法的基本假设,第三个是LK算法特有的。
公式原理详见 https://zhuanlan.zhihu.com/p/
当计算结果不可逆时,产生的孔径效应下文所示:https://zhuanlan.zhihu.com/p/
3.4.3 改进的Lucas-Kanade算法
cv2.calcOpticalFlowPyrLK 讯享网
经常搭配 cv2.goodFeaturesToTrack 函数提前检出关键点。
算法介绍详见 https://blog.csdn.net/u0/article/details/
对视频进行估计代码可见 https://zhuanlan.zhihu.com/p/
3.4.4 Gunnar Farneback算法
讯享网cv2.calcOpticalFlowFarneback
3.5 相位法
代码: https://github.com/owang/PhaseBasedInterpolation
论文: Phase-Based Frame Interpolation for Video [Meyer et al. CVPR 2015].
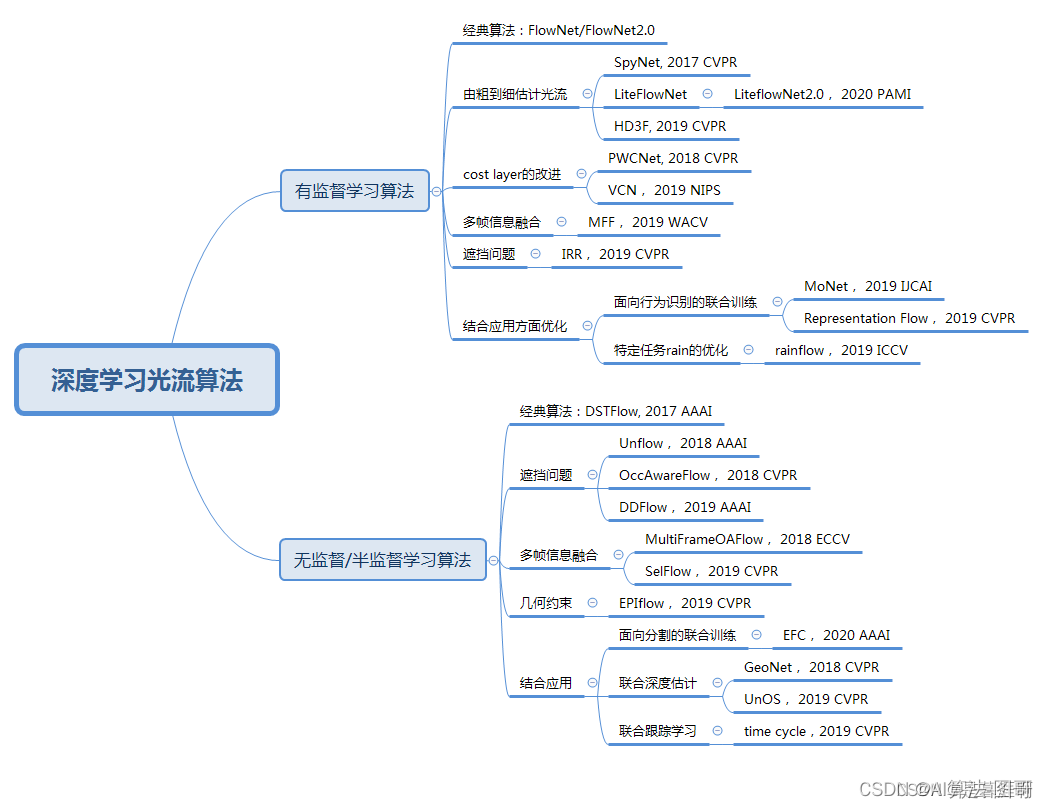
4. DNN光流估计
https://zhuanlan.zhihu.com/p/
5 DNN插帧
专辑 https://string.quest/read/
结果对比 https://zhuanlan.zhihu.com/p/
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/22639.html