
参考:http://wiki.ros.org/actionlib/DetailedDescription
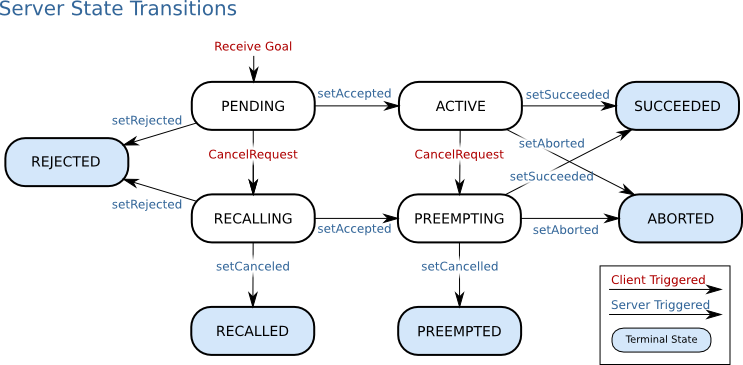
- setAccepted - After inspecting a goal, decide to start processing it
- setAccepted - 检查目标后,决定开始处理
- setRejected - After inspecting a goal, decide to never process it because it is an invalid request (out of bounds, resources not available, invalid, etc)
- setRejected - 检查目标后,决定不要处理它,因为它是一个无效的请求(超出界限,资源不可用,无效等)
- setSucceeded - Notify that goal has been successfully processed
- setSucceeded - 通知该目标已成功处理
- setAborted - Notify that goal encountered an error during processsing, and had to be aborted
- setAborted - 通知目标在处理过程中遇到错误,并且必须中止
- setCanceled - Notify that goal is no longer being processed, due to a cancel request
- setCanceled - 由于取消请求,通知该目标不再被处理
动作客户端也可以异步触发状态转换:
- CancelRequest: The client notifies the action server that it wants the server to stop processing the goal.
- CancelRequest:客户端通知操作服务器它希望服务器停止处理目标。
Intermediate States
中间状态
- Pending - The goal has yet to be processed by the action server
- 待处理 - 目标尚未由操作服务器处理
- Active - The goal is currently being processed by the action server
- 活动 - 目标正在由操作服务器处理
- Recalling - The goal has not been processed and a cancel request has been received from the action client, but the action server has not confirmed the goal is canceled
- 回想 - 目标没有被处理,并且已经从操作客户端收到取消请求,但是操作服务器尚未确认目标被取消
- Preempting - The goal is being processed, and a cancel request has been received from the action client, but the action server has not confirmed the goal is canceled
- 抢占 - 正在处理目标,并从行动客户端收到取消请求,但是行动服务器尚未确认目标已取消
Terminal States
最终状态
- Rejected - The goal was rejected by the action server without being processed and without a request from the action client to cancel
- 被拒绝 - 目标**作服务器拒绝,而不被处理,没有来自操作客户端的请求取消
- Succeeded - The goal was achieved successfully by the action server
- 成功 - 动作服务器成功实现了目标
- Aborted - The goal was terminated by the action server without an external request from the action client to cancel
- 中止 - 目标**作服务器终止,没有来自操作客户端的外部请求取消
- Recalled - The goal was canceled by either another goal, or a cancel request, before the action server began processing the goal
- 回想起来 - 在行动服务器开始处理目标之前,目标被另一个目标或取消请求取消
- Preempted - Processing of the goal was canceled by either another goal, or a cancel request sent to the action server
- 抢占 - 目标的处理被另一个目标或发送到操作服务器的取消请求取消
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/66751.html