
二维平面坐标系转换
平移:
点P(x,y)平移得到点P'(x',y'),
讯享网
矩阵表示:
缩放:
![]()
矩阵表示:

旋转:
矩阵表示:
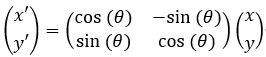
旋转证明:
点P向逆时针旋转了θ度,坐标系如下图,
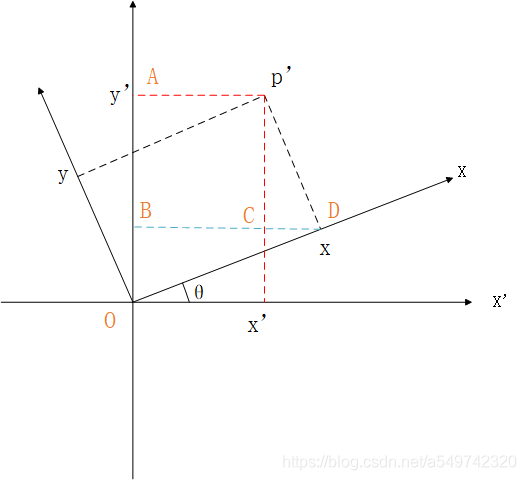
依图可知,


其中的旋转角度θ求法:已知对应坐标系下的两点坐标,求两向量的夹角,两向量的夹角的cos值等于两向量的数量积除以两向量的模的乘积
假设,已知物料坐标系中两点坐标p1(x1,y1),p2(x2,y2),其两点在载台坐标系中的坐标为p3(x3,y3),p4(x4,y4),那么

坐标转换矩阵
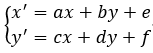
如果一个点同时进行了平移,缩放,旋转,用以下坐标变换矩阵:
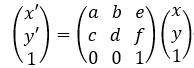
即就是a,b,c,d为缩放、旋转的系数,e,f为平移量
eg:
物料坐标系与载台坐标系如下:
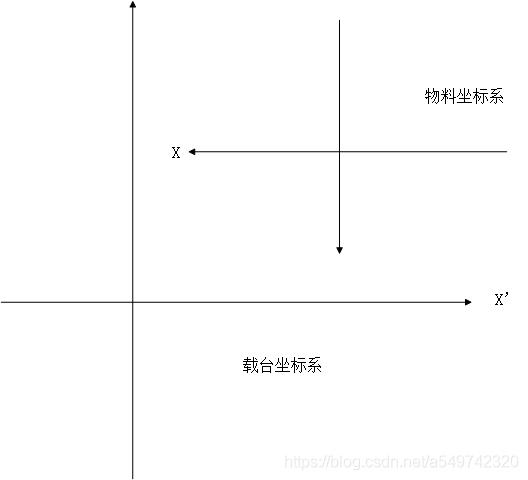
先旋转物料坐标系180°,使其与载台坐标系一致:

C#实现坐标转换矩阵:
using MathNet.Numerics.LinearAlgebra; using MathNet.Numerics.LinearAlgebra.Double; class CoorTransform { public CoorTransform() { } public double Mark1_cust_position_x { get; set; } public double Mark1_cust_position_y { get; set; } public double Mark2_cust_position_x { get; set; } public double Mark2_cust_position_y { get; set; } public double Mark1_stage_position_x { get; set; } public double Mark1_stage_position_y { get; set; } public double Mark2_stage_position_x { get; set; } public double Mark2_stage_position_y { get; set; } Matrix<double> matrix_rotation { get; set; } //转换矩阵 // 设置转换矩阵矩阵 如不同坐标系应先完成坐标系转换(这里的不同指左手坐标系和右手坐标系) public void SetMatrix() { double s1_x = Mark2_cust_position_x - Mark1_cust_position_x; double s1_y = Mark2_cust_position_y - Mark1_cust_position_y; double s2_x = Mark2_stage_position_x - Mark1_stage_position_x; double s2_y = Mark2_stage_position_y - Mark1_stage_position_y; double k = 1; var vectorA = new DenseVector(new[] { s1_x, s1_y }); var vectorB = new DenseVector(new[] { s2_x, s2_y }); double d = vectorA * vectorB; //两向量的夹角的cos值=向量的数量积/向量模的乘积 向量的夹角即为两坐标系间的旋转角度 var cos_sg = (vectorA * vectorB) / (Math.Sqrt(s1_x * s1_x + s1_y * s1_y) * System.Math.Sqrt(s2_x * s2_x + s2_y * s2_y)); var sin_sg = Math.Sin(Math.Acos(cos_sg)); //缩放比例 k = Math.Sqrt((s2_x * s2_x + s2_y * s2_y) / (s1_x * s1_x + s1_y * s1_y)); if (((s1_y / s1_x) > (s2_y / s2_x)) & (s1_x > 0)) { sin_sg = -sin_sg; } double[,] stage2 = { { k*cos_sg, k*-sin_sg}, { k*sin_sg,k*cos_sg}, }; matrix_rotation = DenseMatrix.OfArray(stage2); //两坐标系间的偏移 double offset_x = Mark1_stage_position_x - Mark1_cust_position_x; double offset_y = Mark1_stage_position_y - Mark1_cust_position_y; double[,] stage1 = { { k*cos_sg, k*-sin_sg,offset_x}, { k*sin_sg,k*cos_sg,offset_y}, { 0,0,1} }; matrix_rotation = DenseMatrix.OfArray(stage1); } public void Check(double x1, double y1, double x2, double y2, double x3, double y3, double x4, double y4,double x5, double y5) { Mark1_cust_position_x = x1; Mark1_cust_position_y = y1; Mark2_cust_position_x = x2; Mark2_cust_position_y = y2; Mark1_stage_position_x = x3; Mark1_stage_position_y = y3; Mark2_stage_position_x = x4; Mark2_stage_position_y = y4; SetMatrix(); //由于物料坐标系做了旋转变换(180°),故此坐标点均乘以-1,即旋转矩阵(-1 0 // 0 -1) var vectorsssss = new DenseVector(new[] { -x5, -y5, 1 }); var result = matrix_rotation * vectorsssss; } }讯享网
参考:https://blog.csdn.net/Xu_Claire/article/details/
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/50572.html