
复制粘贴的知乎
讯享网
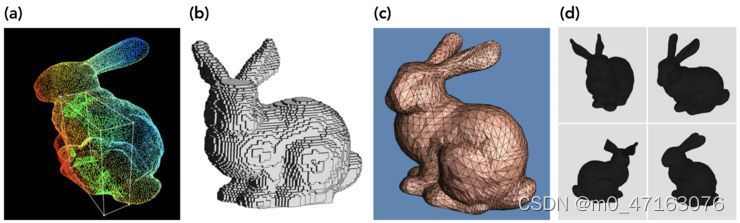
题图中是3D数据的不同表示类型:(a)点云(Point clouds);(b) 体素网格(Voxel grids); © 多边形网格(Polygon meshes); (d) 多视图表示(Multi-view representations)
其中:
a. 点云是三维空间(xyz坐标)点的集合。
b. 体素是3D空间的像素。量化的,大小固定的点云。每个单元都是固定大小和离散坐标。
c. mesh是面片的集合。
d. 多视图表示是从不同模拟视点渲染的2D图像集合。
为了解释体素网格(Voxel grid),首先我们要了解占据栅格地图(Occupancy Grid Map)
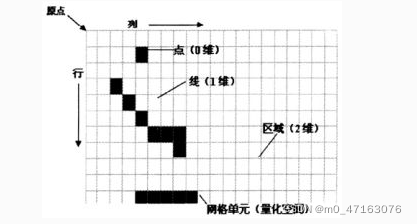
而体素就是固定分辨率的三维栅格地图。
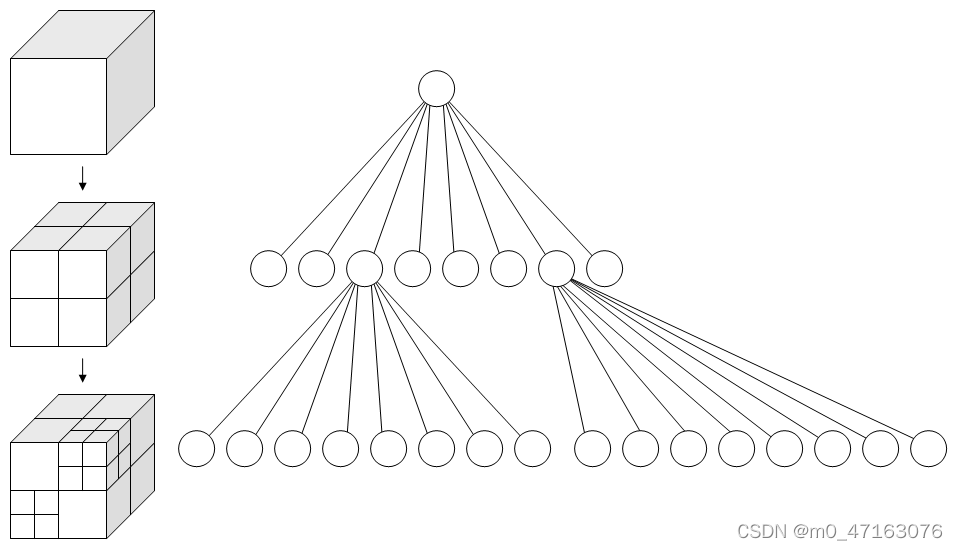
图左是八叉树地图(Octomap),图右是八叉树(Octotree)。
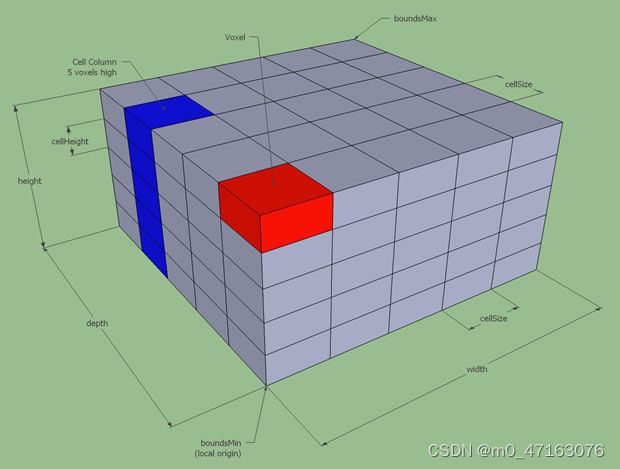
总结:
体素网格是用固定大小的立方块作为最小单元,来表示三维物体的一种数据结构。
体素可以看成粗略版的点云。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/40192.html