
前置芝士
凸多边形
凸多边形指的是所有内角都在 ( 0 , π ] (0,\pi] (0,π] 范围内的多边形。
凸包
对于一个平面上的一个给定的点集,他们对应的凸包就是能把他们全部包含的最小凸多边形。
如果形象一点,可以把平面上的点集想象成木板上的钉子,而其对应的凸包则是一根将所有点围在内部的橡皮筋。
凸包求法
常用的凸包求法有Graham扫描法和Andrew算法,这里主要讲解Graham扫描法,Andrew算法可以看OI-Wiki对应内容。
复杂度
Graham扫描法的时间复杂度是 O ( n log n ) O(n \log n) O(nlogn),瓶颈主要在对所有点的极角排序上。
过程
选取基准点
首先我们选择一个点来当做我们的基准点。
这个点需要在整个点集的最下方,而如果有多个纵坐标相同的点我们选横坐标最小的点,所以我们直接 O ( n ) O(n) O(n) 扫一遍即可。
极角排序
然后把剩下的点以刚才我们选出的点为基准进行极角排序。
因为这个点的左下方没有点,那么任意一个点的极角只能在 ( 0 , π ] (0,\pi] (0,π] 范围内。
会的可以跳过。
下面将我们目前需要比较的两个点称作 P i P_i Pi 和 P j P_j Pj,将基准点称为 P 0 P_0 P0。
我们可以选择两种方法来进行排序。
首先是一种比较浅显的,通过极角的余弦值的相反数来排序。
通过观察,我们可以发现在 ( 0 , π ] (0,\pi] (0,π] 范围内,函数 f ( x ) = − cos ( x ) f(x)=-\cos(x) f(x)=−cos(x) 是单调递增的。
所以我们如果知道了 − cos ( ∠ P i P 0 x ) < − cos ( ∠ P j P 0 x ) -\cos(\angle P_i P_0 x) < -\cos(\angle P_j P_0 x) −cos(∠PiP0x)<−cos(∠PjP0x),那就可以推出来 ∠ P i P 0 x < ∠ P j P 0 x \angle P_i P_0 x < \angle P_j P_0 x ∠PiP0x<∠PjP0x。

代码如下:
double dis(Point a, Point b) {
return sqrt((a.x - b.x) * (a.x - b.x) + (a.y - b.y) * (a.y - b.y)); } bool cmp(Point lhs, Point rhs) {
double lang = -((lhs.x - p[b].x) / dis(lhs, p[b])); double rang = -((rhs.x - p[b].x) / dis(rhs, p[b])); if(lang - rang == 0)return dis(lhs, p[b]) < dis(rhs, p[b]); else return lang < rang; } 讯享网
或者是构造出来两个向量,通过向量的叉积来判断两者的位置。
我们构造出来两个向量 P 0 P i → \overrightarrow{P_0 P_i} P0Pi 和 P 0 P j → \overrightarrow{P_0 P_j} P0Pj,然后计算出来两个向量的叉积。
如果叉积为正,那么就可以证明 ∠ P i P 0 x < ∠ P j P 0 x \angle P_i P_0 x < \angle P_j P_0 x ∠PiP0x<∠PjP0x。
代码如下:
讯享网double dis(Point a, Point b) {
return sqrt((a.x - b.x) * (a.x - b.x) + (a.y - b.y) * (a.y - b.y)); } double oprod(Point a, Point b, Point c, Point d) {
return (b.x - a.x) * (d.y - c.y) - (d.x - c.x) * (b.y - a.y); } bool cmp(Point lhs, Point rhs) {
double chq = oprod(p[b], lhs, p[b], rhs); if(chq == 0)return dis(lhs, p[b]) < dis(rhs, p[b]); else return chq > 0; }
构建凸包
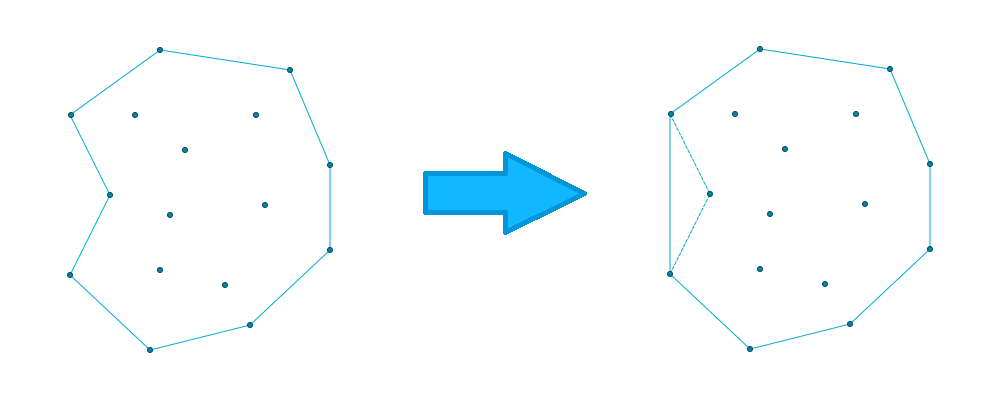
首先来一个图来演示一下构建凸包的过程:
我们使用一个栈来维护当前在凸包上的点。
首先,我们将基准点和第一个点无条件加入栈中。
然后,我们遍历剩下的点,每一次将将要加入栈中的点 P P P 与栈顶的点 S 1 S_1 S1 和栈顶下方的第一个点 S 2 S_2 S2 构成两个向量 S 1 P → \overrightarrow{S_1 P} S1P 和 S 2 S 1 → \overrightarrow{S_2 S_1} S2S1,如果 S 1 P → \overrightarrow{S_1 P} S1P 较 S 2 S 1 → \overrightarrow{S_2 S_1} S2S1 向顺时针方向旋转,即叉积 S 1 P → × S 2 S 1 → < 0 \overrightarrow{S_1 P} \times \overrightarrow{S_2 S_1} < 0 S1P×S2S1<0,我们就将 S 1 S_1 S1 弹出栈,返回上一步继续检测,直到栈中只剩一个点或叉积非负为止。
最后把点加入栈中。
代码如下:
vector<Point>v; for(int i = 1; i <= n; i++) if(i != b)v.push_back(p[i]); sort(v.begin(), v.end(), cmp);//稍微麻烦一点的排序 p[1] = p[b]; for(int i = 2; i <= n; i++) p[i] = v[i - 2]; sta[1] = 1, sta[2] = 2, tt = 2;//初始化栈 for(int i = 3; i <= n; i++) {
while(tt >= 2 && oprod(p[sta[tt - 1]], p[sta[tt]], p[sta[tt]], p[i]) <= 0) tt--; sta[++tt] = i; }
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/38202.html