这是一种常见的定位算法
平面上有三个不共线的基站 A,B,C,和一个未知终端 D,并已测出三个基站到终端D的距离分别为R1,R2,R3,则以三个基站坐标为圆心,三基站到未知终端距离为半径可以画出三个相交的圆,如图下图所示,未知节点坐标即为三圆相交点


在实际测量中,往往由于测量的误差,使三个圆并不交于一点,而相交于一块区域,如下图所示。在此种情况下,便需用其他算法进行估计,这里采用最小二乘法进行求解。

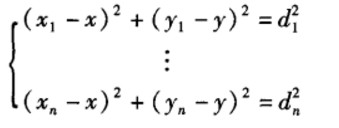
- 建立方程,得到如下方程组:

三角定位算法这是一种常见的定位算法 平面上有三个不共线的基站 A B C 和一个未知终端 D 并已测出三个基站到终端 D 的距离分别为 R1 R2 R3 则以三个基站坐标为圆心 三基站到未知终端距离为半径可以画出三个相交的圆 如图下图所示 未知节点坐标即为三圆相交点 在实际测量中 往往由于测量的误差 使三个圆并不交于一点 而相交于一块区域 如下图所示 在此种情况下 便需用其他算法进行估计
这是一种常见的定位算法
平面上有三个不共线的基站 A,B,C,和一个未知终端 D,并已测出三个基站到终端D的距离分别为R1,R2,R3,则以三个基站坐标为圆心,三基站到未知终端距离为半径可以画出三个相交的圆,如图下图所示,未知节点坐标即为三圆相交点
在实际测量中,往往由于测量的误差,使三个圆并不交于一点,而相交于一块区域,如下图所示。在此种情况下,便需用其他算法进行估计,这里采用最小二乘法进行求解。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/30716.html