
本文我们主要讲解了如何为自定义类添加方法,pyseria库的基本使用(串口数据收发、serial.Serial类的属性和方法),VSPDPro虚拟串口软件使用方法等,并使用自定义的串口类和PC主机进行串口数据收发。
学嵌入式的你,还不会面向对象??!
全网最适合入门的面向对象编程教程:00 面向对象设计方法导论
全网最适合入门的面向对象编程教程:01 面向对象编程的基本概念
全网最适合入门的面向对象编程教程:02 类和对象的Python实现-使用Python创建类
全网最适合入门的面向对象编程教程:03 类和对象的Python实现-为自定义类添加属性
给你的Python加加速:一文速通Python并行计算
一文搞懂CM3单片机调试原理
肝了半个月,嵌入式技术栈大汇总出炉
电子计算机类比赛的“武林秘籍”
可访问如下链接进行对文档下载:
本文档主要介绍如何使用 Python 进行面向对象编程,需要读者对 Python 语法和单片机开发具有基本了解。相比其他讲解 Python 面向对象编程的博客或书籍而言,本文档更加详细、侧重于嵌入式上位机应用,以上位机和下位机的常见串口数据收发、数据处理、动态图绘制等为应用实例,同时使用 Sourcetrail代码软件对代码进行可视化阅读便于读者理解。
相关示例代码获取链接如下:
可以看到上一小节,我们为SerialClass类添加了串口设备名、波特率、数据位等串口相关的属性,但是注意到面向对象编程的重点在于不同对象之间的交互。我们感兴趣的是,触发某些行为可以使属性发生变化或与外界产生交互。在类中定义函数就相当于定义类的方法,回想一下我们在单片机上使用串口时往往进行打开串口、发送数据、接收数据和关闭串口等操作,在PC端串口操作与单片机上类似。这里我们先为类添加方法,具体实现先省略,代码如下:
classSerialClass:# 注意:特殊方法“init”前后分别有两个下划线!!! definit(self,port,baudrate,bytesize,parity,stopbits): self.devport = port self.devbaudrate = baudrate self.devbytesize = bytesize self.devparity = parity self.devstopbits = stopbits
# 打开串口 defOpenSerial(self): *#TODO:打开串口方法待完成* pass
# 关闭串口 defCloseSerial(self): *#TODO:打开串口方法待完成* pass
# 串口读取 defReadSerial(self): *#TODO:串口读取方法待完成* pass
# 串口写入 defWriteSerial(self): *#TODO:串口写入方法待完成* pass
这时,我们可以利用dir(obj)方法获得类的对象实例的所有属性和方法名,dir(obj)返回一个list。我们使用for循环打印,代码如下:
# serdev是SerialClass类的一个实例化对象 for item indir(serdev): print(item)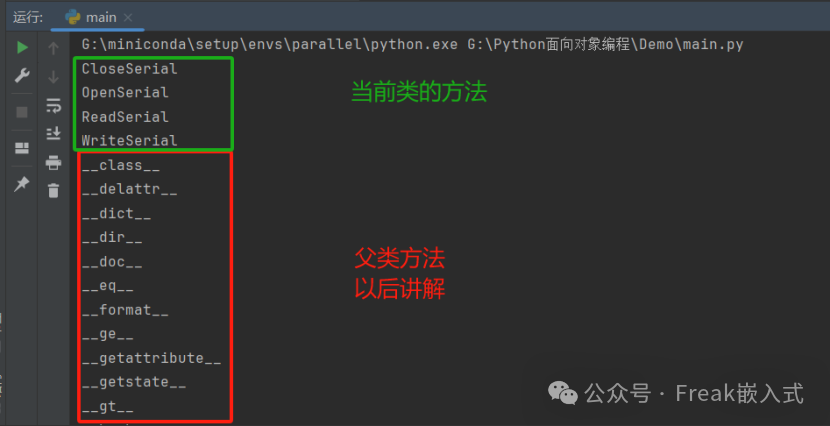
可以看到,我们已经给串口类添加了具体方法,这里,你可能会问,那这些方法具体该怎么实现呢?难道说要我们调操作系统的驱动函数读取串口、造轮子对数据解析?当然不可能,Python强大的第三方库什么都有,这不,它来了:
pyserial,一个实用的串口通信python库
pySerial是Python中用于操作串口的第三方模块,它支持Windows、Linux、OSX、BSD等多个平台。如果要使用pySerial模块,首先必须保证Python版本高于Python 2.7或者Python 3.4。另外,如果你是用的是Windows系统,那必须使用Win7及以上的版本。
pySerial的安装很简单,只需要执行一条命令:pipinstallpyserial。安装完成后,只需要在Python代码中使用import serial语句导入该模块即可。
pySerial中主要的类就是class serial.Serial,官方文档说明如下:
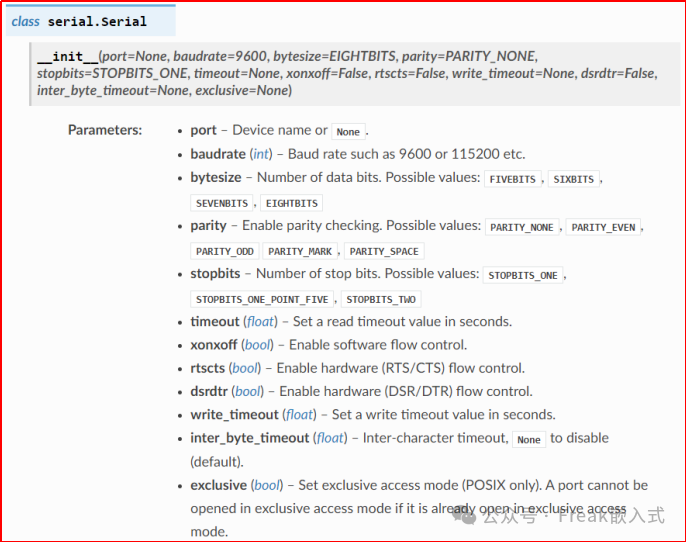
常用参数含义如下:
serial.Serial类常用方法如下:
接下来看我们的示例代码:
classSerialClass: definit(self,devport,devbaudrate,devbytesize,devparity,devstopbits): # 直接传入serial.Serial()类 self.dev = serial.Serial() self.dev.port = devport self.dev.baudrate = devbaudrate self.dev.bytesize = devbytesize self.dev.parity = devparity self.dev.stopbits = devstopbitsdefOpenSerial(self): self.dev.open()
defCloseSerial(self): self.dev.close()
defReadSerial(self): # 非阻塞方式按行读取
data = self.dev.readline() # 收到为二进制数据,用utf-8编码将二进制数据解码为unicode字符串 # 字符串转为int类型
data = int(data.decode('utf-8', 'replace')) return data
defWriteSerial(self,write_data): # 非阻塞方式写入 self.dev.write(write_data.encode()) # write的输入参数必须是bytes 格式, # 字符串数据需要encode()函数将其编码为二进制数据 # 表示换行回车 self.dev.write(’ ‘.encode())
这里可以看到,为方便讲解,我们直接调用pyserial库中函数完成串口的打开关闭和读写等功能:
- 在初始化函数中,我们定义self.dev属性为串口设备,用其接收串口对象,相当于self.dev就是serial.Serial类的实例对象,其后用其他入参给self.dev设置串口通信参数,完成串口设备对象的创建;
- 在打开串口和关闭串口函数中,我们使用self.dev.open()、self.dev.close()语句,相当于直接调用serial.open()和serial.close()方法;
- 重点就在收发函数中,需要特别注意的有两点:
①串口接收到的是二进制数据,如果接收到的data全是英文,就需要用utf-8编码将二进制数据解码为unicode字符串。如果data里包含中文,则最好以 gb18030编码将二进制数据解码为unicode字符串。
同时,有时候由于带中文,或者由于串口的传输线缆出现接触不良等原因,会产生错误或者乱码,如果直接解码,就会报错,为了能够顺畅的解码串口打印,避免这种情况发送,decode的参数里加上“replace”即可。它实现的作用是,如果解码的过程中遇到错误,会自动以问号?代替解码失败的字符。
②在串口发送中,pyserial的文档注明了,write的输入参数必须是bytes 格式的(也就是二进制数据),python3里对字符串和二进制数据流有明确的区分,文本总是unicode编码储存的,由str类型表示。二进制数据则由bytes类型表示,所以字符串数据需要encode()函数将其编码为二进制数据,然后才可以顺利发送。
串口类的方法已然写好,接下来如果进行测试呢?我们需要买一个单片机和usb转ttl模块连接电脑,进行串口类的方法测试?(当然不是,开个玩笑)
在写与单片机通信的上位机软件时,如果使用单片机的串口来实际调试,那么我们至少还需要一个USB转串口,这样才能让单片机和电脑串口通讯,接着我们还需要在单片机上运行程序和串口相关的程序,以便我们知道数据传输的状态,这无疑加大的开发的难度。这里,我们使用虚拟串口软件即可,虚拟串口软件是一种模拟物理串行接口的软件,它完全复制了硬件 COM 接口的功能,并且将被操作系统和串行应用程序识别为真实端口。现实生活中,虚拟串口用处很多。比如:你的应用程序检测串行输入数据的时候,方便调试。还比如:多个有应用程序之间使用串口通信。
这里我们使用VSPDProv6.9软件,创建虚拟串口,软件下载安装教程点击链接:
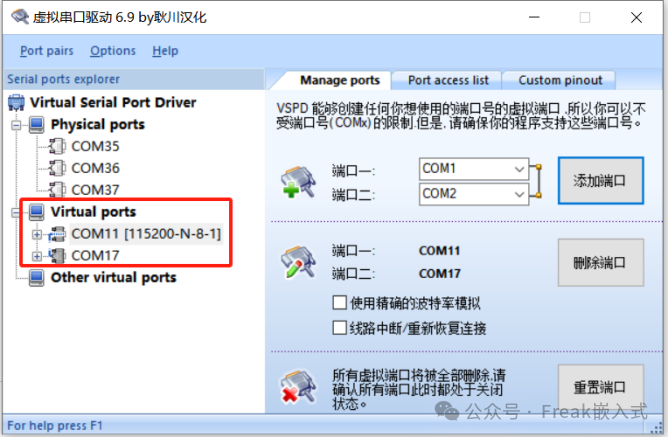
这里我们创建两个相互连接的串口com11和com17,虚拟的串口需要成对创建,来指明他们的连接关系,就好比各种连接线的公投和母头一样。我们建立好虚拟串口连接以后,就可以使用它们来通讯了,我们可以选择任意一个串口助手软件来与我们写的python串口类进行通信。这里,我们选择xcom软件进行测试,xcom软件的安装下载教程可以点击链接:
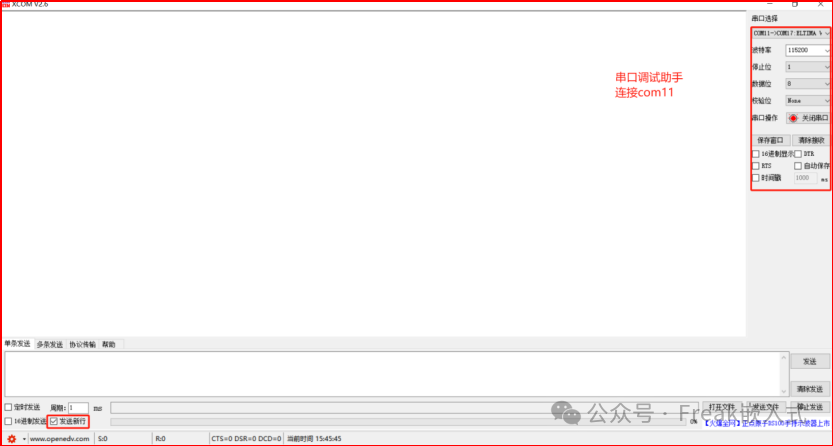
打开xcom软件,我们先进行相关串口参数的配置,具体如下图所示:
此时,我们在Python程序中,创建串口设备实例,连接com17,代码如下:
# 生成串口类的实例 serdev = SerialClass(devport = “COM17”, devbaudrate = , devbytesize = serial.EIGHTBITS, *# 数据位长度为8位* devparity = serial.PARITY_NONE, *# 无奇偶校验* devstopbits = serial.STOPBITS_ONE *# 1位停止位* )我们首先尝试使用Python完成串口发送功能,这里我们定义了一个count计数变量,初始值为0,每次发送完成后递增,循环100次后关闭串口,代码如下:
serdev.OpenSerial() count = 0 whileTrue:必须使用全局变量,不然每次循环都是一个新的count
关于原因可以自行查看变量的生存期和作用域相关知识点
count = count + 1
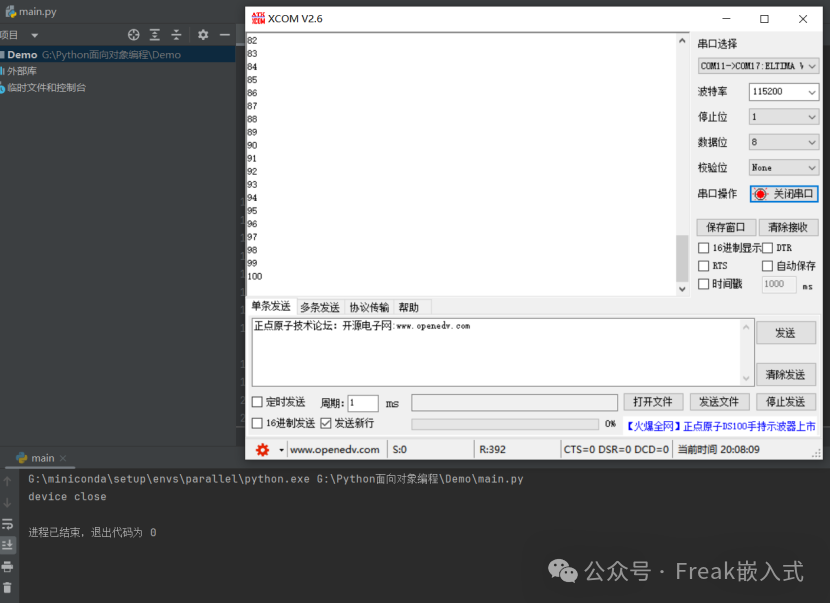
serdev.WriteSerial(str(count)) if(count == 100): break serdev.CloseSerial() print(“device close”)
运行结果如下:
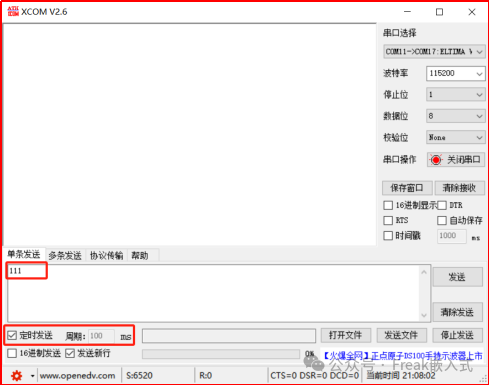
接下来,我们尝试使用Python完成串口接收功能,我们在xcom中定时发送,在Python中轮询接收并打印接收的数据,这里我们导入time库,打印接收时间。time库是Python中处理时间的标准库,是最基础的时间处理库。time库主要用于计时和获取系统时间,time.ctime()函数用于获取当前世界统一时间,形式为“星期-月份-当月号-时-分-秒-年份”。
示例代码和配置如下:
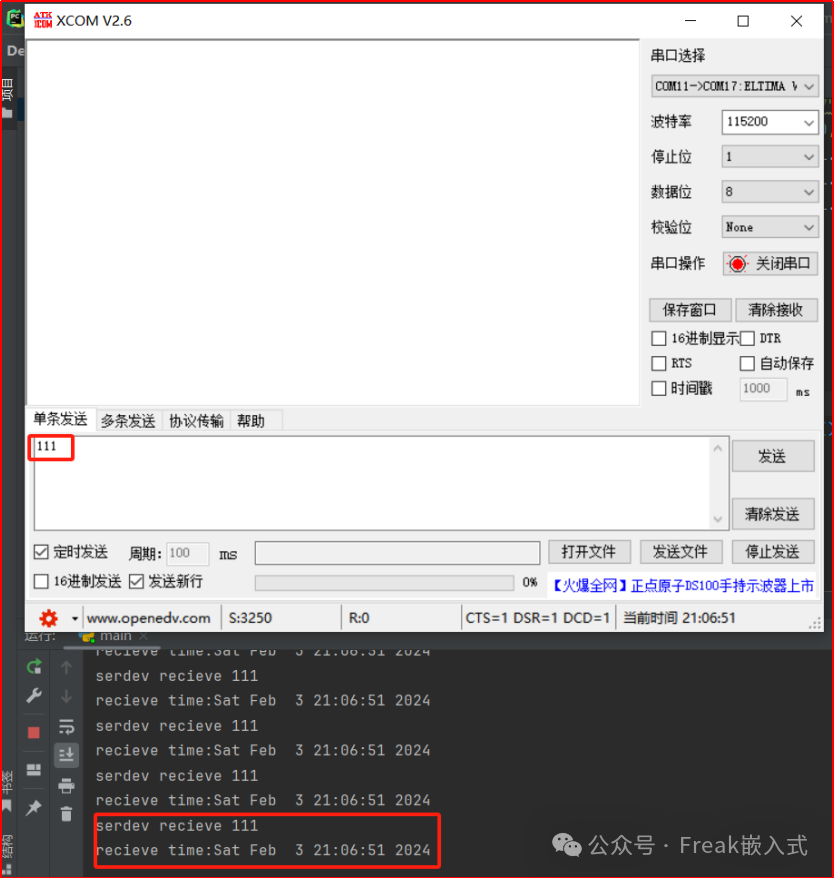
importtime whileTrue:data = serdev.ReadSerial() print(“serdev recieve %d”%data) print(“recieve time:”+str(time.ctime()))
运行结果如下:

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/265065.html