
一、汉王双目立体人脸识别技术
人脸识别系统框图
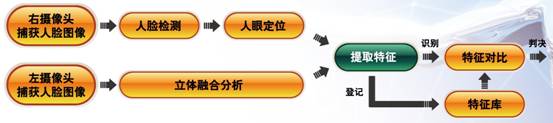
汉王人脸识别系统采用双摄像头,右侧摄像头的图片进行人脸定位和人眼定位,同时左侧摄像头与右侧摄像头的图片进行立体融合,恢复出三维人脸模型,在此基础上,进行特征提取和比对,实现模版录入和识别等功能。下面简要介绍一下汉王人脸识别过程。
1、人脸检测
人脸检测部分有两个功能:一是判断图像中是否存在人脸,二是如果存在人脸,确定人脸的确切位置。汉王人脸识别系统采用级联的Adaboost以及Haar特征进行人脸定位,正确率高,速度快。
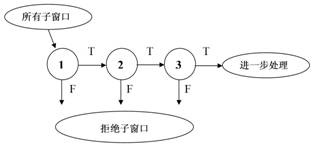
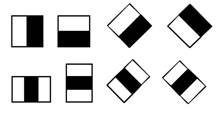
级联Adaboost算法流程图 Harr特征示意图
2、人眼定位
眼睛是人脸中最关键的一个部分,也是区分不同人脸的最重要的一个区域,同时通过眼睛位置的精确定位后,可以更好的对齐人脸上的其它各个器官,所以对眼睛进行精确定位极其重要。汉王人脸识别系统采用极小值区域(MER)原理以及多层结构的方法,很好的解决了眼睛定位的问题。图3基于多层结构的快速眼睛定位算法结构:
眼睛粗定位:利用极小值区域(MER)做粗定位
粗筛选:利用眼睛对的自然约束进行粗筛选
分类器一:使用眼睛坐标以及灰度值等参数
分类器二:使用Krisch梯度特征做最终的筛选
眼睛精确定位:利用局部图像重心微调眼睛位置
具体流程如下:
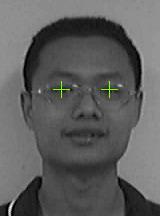
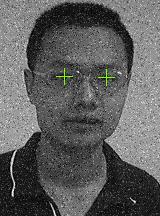
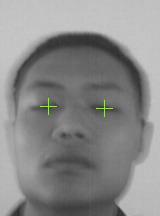
正常图像 噪声干扰 运动模糊
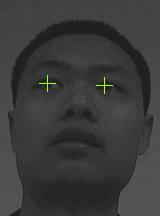


图像偏暗 图像偏亮 远距离、位置偏离中心
3、双目融合
二维人脸图像缺乏三维信息,容易收到光照、姿态、表情等影响,鉴于此,汉王人脸识别系统采用双摄像头并进行立体融合,恢复出三维人脸模型。三维信息可以用于姿态,光照,眼镜等模型变换和生成。三维信息恢复过程如下图:
4、特征提取
特征是指从人脸图像中提取的一组能区分不同人脸的向量,也称之为人脸表示。而基于Gabor小波的人脸表示在人脸识别中取得了巨大的成功。Gabor小波的核定义为:

归一化的灰度图像 Gabor特征提取图像
由于Gabor小波原始维数过高,计算量大,需要做降维的处理,即用低维的向量来表示高维的向量。因此,汉王人脸识别系统采用了一种先进的降维方法,即张量子空间分析方法(简称ORO),该方法把人脸表示看成一个张量,通过迭代的方法寻找正交的秩—张量进行降维,其优化函数为:


该方法有一下几个优点:一是用张量表示人脸能够捕捉人脸的局部结构信息;二是张量的每个分量的维数很低,能够避免出现LDA(线性判别分析)中的维数灾难问题;三是该方法的降维矩阵远远小于LDA的降维矩阵,这对于一些存储空间有限的嵌入式应用非常合适。
5、特征比对
特征比对主要是比较两张人脸间的相似度,汉王人脸识别体现采用特征间的相关度作为相似度的描述:
在识别人脸的时候,待识别图像与特征库中的所有特征进行对比,其相似度最大者即为匹配结果。
摘自:http://www.fzhjkj.com/foreground/rxsbjs.aspx
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/24290.html