
5.2 参数调整和调试优化
在实际应用中,通过调整和调试PID控制器的参数,可以确保系统获得良好性能。通常,PID参数的调整和调试工作需要一些试错和经验。在本节的内容中,将详细讲解PID参数的调整和调试的常见方法和技巧。
5.2.1 手动调整法
"手动调整法"是指在调整PID(比例-积分-微分)控制器的参数时,工程师通过手动试验、观察和调整的方法来优化系统性能。这种方法通常包括逐步调整比例增益 Kp、积分时间 Ti和微分时间 Td这三个参数,以找到**的参数组合,使系统能够在不产生过度振荡或失稳的情况下快速而稳定地响应。
- 比例增益 Kp:从零开始逐渐增加,直到系统开始出现振荡。比例增益Kp负责根据当前误差的大小提供控制输出,逐渐增加Kp会使系统对误差更敏感,从而引起振荡。逐步减小Kp直到振荡减小,找到合适的比例增益,既能快速响应系统,又能保持稳定。
- 积分时间Ti:逐渐增加Ti,观察系统的响应速度和稳定性。确保系统没有积分饱和,即积分项不会使系统过度响应。这样可以提高系统的稳定性和抗干扰能力。需要确保增大Ti后系统仍能快速稳定。
- 微分时间Td:逐渐增加Td,观察系统的抑制振荡和稳定性。确保微分项不会引入额外的噪音或导致系统不稳定。然而,过大的Td可能会引入噪音,导致系统不稳定。因此,在调整Td时需要注意平衡抑制振荡和稳定性之间的关系。
例如在机器人领域中,可以考虑一个简单的轮式移动机器人的速度控制问题。下面是一个使用PID控制算法进行手动调整的例子,机器人的目标是维持在速度为5的目标速度。通过手动调整Kp、Ki和Kd参数,可以观察到系统的响应变化,以及调整这些参数对系统性能的影响。请注意,在实际应用中可能需要更复杂的模型和参数调整方法。
实例5-1:在机器人应用中调整PID控制器的参数(源码路径:codes\5\pid\shou.py)
实例文件shou.py的具体实现代码如下所示。
import simpy import matplotlib.pyplot as plt class Robot: def __init__(self, env, Kp, Ki, Kd): self.env = env self.speed = 0 # 初始速度 self.target_speed = 5 # 目标速度 self.error = 0 self.last_error = 0 self.Kp = Kp self.Ki = Ki self.Kd = Kd self.speed_data = [] def update_speed(self): while True: # 计算PID控制输出 proportional = self.Kp * self.error integral = self.Ki * sum(self.speed_data) derivative = self.Kd * (self.error - self.last_error) control_output = proportional + integral + derivative # 限制控制输出在合理范围内 control_output = max(min(control_output, 10), -10) # 更新速度 self.speed += control_output # 记录速度数据,用于积分项计算 self.speed_data.append(self.speed) # 计算误差 self.error = self.target_speed - self.speed # 记录上一次的误差 self.last_error = self.error # 等待一段时间,模拟控制周期 yield self.env.timeout(0.1) def simulate(self, runtime): env.process(self.update_speed()) self.env.run(until=runtime) # 手动调整PID参数 Kp = 1.0 Ki = 0.1 Kd = 0.01 # 创建仿真环境和机器人对象 env = simpy.Environment() robot = Robot(env, Kp, Ki, Kd) # 运行仿真,模拟10秒钟的时间 robot.simulate(10) # 绘制速度曲线 plt.plot(robot.speed_data) plt.xlabel('Time (s)') plt.ylabel('Speed') plt.title('PID Control Simulation') plt.show()讯享网
上述代码的实现流程如下所示:
- 首先,定义了类Robot表示机器人,其中包含机器人的速度、目标速度、误差、以及PID控制的参数(Kp、Ki、Kd)。
- 接着,通过SimPy创建了仿真环境和机器人对象。在机器人对象中实现了update_speed方法,该方法通过PID控制算法计算控制输出,更新机器人的速度,并模拟控制周期。
- 然后,调用simulate方法运行仿真,模拟了一定时间范围内的机器人速度控制过程。
- 最后,利用Matplotlib库绘制了PID控制下的速度曲线,使用户能够观察和分析手动调整PID参数对系统响应的影响。效果如图5-1所示。
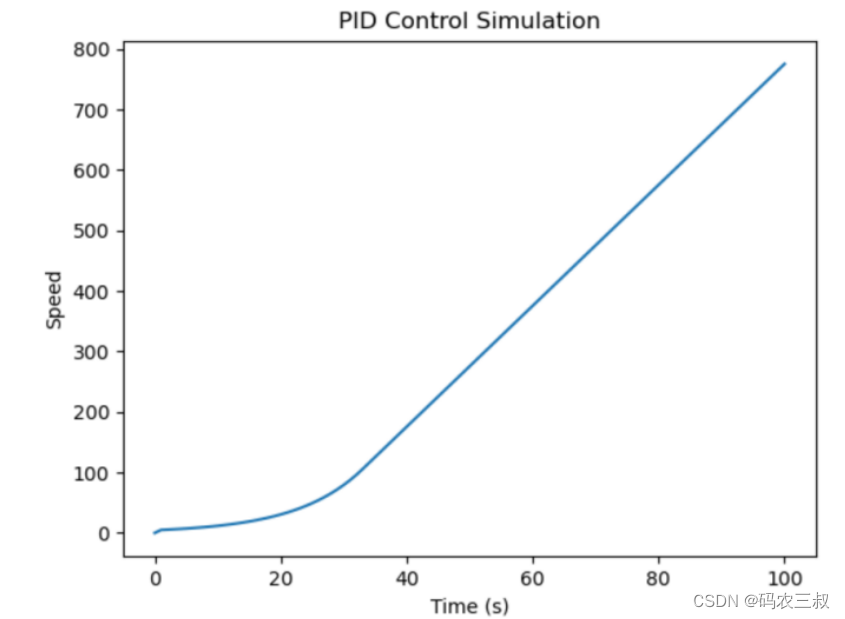
图5-1 速度变化曲线图
5.2.2 Ziegler-Nichols方法
Ziegler-Nichols方法是一种用于调整PID控制器参数的经验性方法,最初由John G. Ziegler和Nathaniel B. Nichols于1942年提出。Ziegler-Nichols方法通过分析系统的阶跃响应曲线来确定合适的PID参数,具体实现步骤如下所示。
(1)设置 Ki和 Kd为零: 将积分项 Ki和微分项 Kd设置为零,只保留比例项Kp。
(2)逐渐增加 Kp:从零开始逐渐增加比例增益 Kp,直到系统出现持续的振荡(周期性的输出波动)。
(3)确定临界增益 Kpc和周期Tpc:记录持续振荡时的比例增益 Kpc和振荡周期 Tpc,这是系统的临界增益和临界周期。
(4)计算 Ki和 Kd:Ki可以通过以下公式计算:Ki=0.5⋅Kpc/Tpc
Kd可以通过以下公式计算:
Kd=0.125⋅Kpc⋅Tpc
(5)调整 Kp, Ki, Kd:根据实际需要,可以进一步调整 Kp , K i , K d的值。
Ziegler-Nichols方法主要适用于一阶或二阶系统,对于高阶系统可能不够精确。此方法的优势在于其简单性和直观性,但使用时需要小心,因为在实际系统中可能引入不稳定性。一些自动化工具箱或软件工具(如MATLAB/Simulink的工具箱)也提供Ziegler-Nichols自动调整算法,可帮助更方便地进行参数调整。
例如在智能驾驶领域中,经常需要控制车辆的纵向速度。下面是一个使用Ziegler-Nichols方法进行PID控制的例子,将车辆的目标是维持在速度为20的目标速度。通过Ziegler-Nichols方法确定参数Kp、Ki和 Kd的初始值。然后,通过SimPy进行仿真,观察在PID控制下的车辆速度响应。
实例5-2:使用Ziegler-Nichol方法控制车辆的速度(源码路径:codes\5\pid\zn.py)
实例文件zn.py的具体实现代码如下所示。
讯享网import simpy import matplotlib.pyplot as plt class Vehicle: def __init__(self, env, Kp, Ki, Kd): self.env = env self.velocity = 0 self.target_velocity = 20 # 目标速度 self.error = 0 self.last_error = 0 self.Kp = Kp self.Ki = Ki self.Kd = Kd self.velocity_data = [] def update_velocity(self): while True: # 计算PID控制输出 proportional = self.Kp * self.error integral = self.Ki * sum(self.velocity_data) derivative = self.Kd * (self.error - self.last_error) control_output = proportional + integral + derivative # 限制控制输出在合理范围内 control_output = max(min(control_output, 5), -5) # 更新速度 self.velocity += control_output # 记录速度数据,用于积分项计算 self.velocity_data.append(self.velocity) # 计算误差 self.error = self.target_velocity - self.velocity # 记录上一次的误差 self.last_error = self.error # 等待一段时间,模拟控制周期 yield self.env.timeout(0.1) def simulate(self, runtime): env.process(self.update_velocity()) self.env.run(until=runtime) # 使用Ziegler-Nichols方法确定PID参数 Kp = 0.6 Ki = 0.5 Kd = 0.075 # 创建仿真环境和车辆对象 env = simpy.Environment() vehicle = Vehicle(env, Kp, Ki, Kd) # 运行仿真,模拟20秒钟的时间 vehicle.simulate(20) # 绘制速度曲线 plt.plot(vehicle.velocity_data) plt.xlabel('Time (s)') plt.ylabel('Velocity') plt.title('PID Control Simulation using Ziegler-Nichols Method') plt.show()
上述代码的实现流程如下所示:
- 首先,定义了一个名为Vehicle的类,表示具有PID控制的车辆模型。在初始化时,分别设置了初始速度、目标速度和PID控制的参数Kp、Ki和Kd。
- 接着,定义了update_velocity方法,使用PID控制算法来更新车辆的速度。在这个方法中,计算了比例、积分和微分项,然后通过限制控制输出的范围来更新车辆的速度。整个过程中,我们记录了速度数据和误差项,模拟了控制周期。
- 接着,通过simulate方法将update_velocity方法加入仿真环境中,并运行仿真直至指定的运行时间。
- 最后,我们使用Ziegler-Nichols方法确定了初始的Kp、Ki和Kd参数的值,创建了仿真环境和车辆对象,并运行了20秒钟的仿真。最终,通过Matplotlib库绘制了车辆速度随时间变化的曲线,用于观察PID控制在Ziegler-Nichols方法下的性能。效果如图5-1所示。


图5-1 车辆速度变化曲线图
5.2.3 频率响应法
频率响应法是一种用于调整PID控制器参数的方法,通过分析系统对不同频率输入的响应来确定**的参数值。频率响应法基于系统对不同频率信号的响应,通过分析系统的幅频特性和相频特性来调整PID参数。这种方法常用于线性时不变系统,其中系统的频率响应可以用传递函数或系统函数来表示。
1. 实现步骤
实现频率响应法的基本步骤如下所示。
(1)生成频率扫描信号:在频率响应法中,通常使用正弦波信号作为输入信号。通过改变正弦波信号的频率,我们可以观察系统对不同频率的响应。
(2)测量系统的幅频特性和相频特性:将正弦波信号输入系统,测量系统对应频率下的输出幅值和相位。这样可以得到系统的频率响应曲线。
(3)分析曲线:观察系统的频率响应曲线,找到系统的截止频率、相位裕度等关键特性。这些特性反映了系统对不同频率的响应情况。
(4)调整PID参数:根据频率响应曲线的分析结果,调整PID参数,以使系统的频率响应更符合性能要求。通常需要平衡系统的稳定性、响应速度和抗干扰能力。
2. 参数调整
- 比例增益 Kp:调整比例增益可以影响系统的整体增益,直接影响系统对高频信号的响应。
- 积分时间 Ti:调整积分时间可以影响系统对低频信号的响应,提高系统的稳定性。
- 微分时间 Td:调整微分时间可以影响系统对高频信号的相位,改善系统的相位裕度。
3. 软件工具和模拟
使用工具如MATLAB/Simulink中的频率响应分析工具箱,可以更方便地进行频率响应分析和参数调整。通过仿真模拟,可以在不同频率下测试系统响应,加速参数调整过程。
总体而言,频率响应法是一种有效的PID参数调整方法。频率响应法提供了一种直观而全面的分析方式,能够更准确地调整PID参数以适应系统的频率特性,适用于需要考虑系统动态特性和频率响应的控制系统。在使用频率响应法时,需要考虑系统的稳定性、相位裕度和幅值裕度,以确保系统在各个频率范围内都具有良好的性能。
例如在下面的例子中,将机器人的维持在速度为5的目标速度。通过使用频率响应法,在simulate方法中传递了频率参数,以模拟不同频率下的系统响应。通过观察速度曲线,可以更直观地了解系统在不同频率下的行为,从而更好地调整PID参数以满足性能要求。
实例5-3:使用频率响应法控制机器人的速度(源码路径:codes\5\pid\pin.py)
实例文件pin.py的具体实现代码如下所示。
import simpy import matplotlib.pyplot as plt import numpy as np class Robot: def __init__(self, env, Kp, Ki, Kd): self.env = env self.velocity = 0 self.target_velocity = 5 # 目标速度 self.error = 0 self.last_error = 0 self.Kp = Kp self.Ki = Ki self.Kd = Kd self.velocity_data = [] def update_velocity(self, frequency): while True: # 生成频率扫描信号(正弦波信号)和相位变化 input_signal = np.sin(2 * np.pi * frequency * self.env.now) phase_variation = np.sin(2 * np.pi * frequency * 0.5 * self.env.now) # 引入相位变化 # 计算PID控制输出 proportional = self.Kp * self.error integral = self.Ki * sum(self.velocity_data) derivative = self.Kd * (self.error - self.last_error) control_output = proportional + integral + derivative # 限制控制输出在合理范围内 control_output = max(min(control_output, 5), -5) # 更新速度,将输入信号和相位变化都添加到速度中 self.velocity += control_output + input_signal + 0.5 * phase_variation # 记录速度数据,用于积分项计算 self.velocity_data.append(self.velocity) # 计算误差 self.error = self.target_velocity - self.velocity # 记录上一次的误差 self.last_error = self.error # 等待一段时间,模拟控制周期 yield self.env.timeout(1.0 / frequency) def simulate(self, runtime, frequency): env = self.env # 将env定义在simulate方法中 env.process(self.update_velocity(frequency)) env.run(until=runtime) # 生成频率响应法的例子 def frequency_response_example(): # 频率扫描范围 frequencies = np.arange(0.1, 2.0, 0.1) # 存储结果 amplitude_response = [] phase_response = [] for frequency in frequencies: # 创建仿真环境和机器人对象 env = simpy.Environment() robot = Robot(env, 0.6, 0.5, 0.075) # 运行仿真,模拟10秒钟的时间 robot.simulate(10, frequency) # 记录幅频特性和相频特性 amplitude_response.append(max(robot.velocity_data)) phase_response.append(np.angle(robot.velocity_data[-1], deg=True)) # 绘制频率响应曲线 plt.figure(figsize=(12, 5)) plt.subplot(1, 2, 1) plt.plot(frequencies, amplitude_response) plt.xlabel('Frequency (Hz)') plt.ylabel('Amplitude Response') plt.title('Frequency Response - Amplitude') plt.subplot(1, 2, 2) plt.plot(frequencies, phase_response) plt.xlabel('Frequency (Hz)') plt.ylabel('Phase Response (degrees)') plt.title('Frequency Response - Phase') plt.tight_layout() plt.show() # 执行例子 frequency_response_example()在上述代码中,生成了一个频率扫描信号,即正弦波信号,并将其添加到速度中。通过在不同频率下运行仿真,记录了机器人系统的幅频特性和相频特性。最后,通过绘制频率响应曲线,可以观察系统对不同频率的响应情况。上述代码的实现流程如下所示:
- 首先,创建了一个名为Robot的类,用于模拟机器人的速度控制系统。该类包含了初始化方法__init__,其中定义了机器人的初始状态,包括速度、目标速度和PID控制器的参数。同时,定义了update_velocity方法,该方法在仿真过程中计算机器人的速度响应,引入了频率扫描信号和相位变化。还实现了simulate方法,该方法用于运行整个仿真过程。
- 其次,编写了名为frequency_response_example的函数,该函数演示了频率响应法的应用。在函数中,首先定义了频率扫描范围,并创建了存储结果的空列表。然后,通过迭代不同的频率,创建了仿真环境和机器人对象,运行仿真过程并记录幅频特性和相频特性。最后,绘制了两个子图,一个显示幅频特性,另一个显示相频特性。
- 最后,执行frequency_response_example函数,可视化展示了整个频率响应法的仿真过程,如图5-2所示。在可视化图形,左侧子图展示了幅频特性的变化,右侧子图展示了相频特性的变化。

图5-2 幅频特性和相频特性的模拟图
注意:上面的第二个子图是水平直线,可能是因为幅值较小或者引入的随机性不够明显。我们可以尝试使用更大的随机成分phase_variation或者调整其他参数,以确保相位变化在仿真过程中更加明显。
注意:在进行PID参数调整时,请遵循如下所示的建议。
- 逐步调整:一次只调整一个参数,以避免引入不稳定性。
- 记录数据:记录每次调整的结果,以便比较和回溯。
- 注意系统限制:确保调整后的参数在实际系统中是可行和合理的。
- 考虑鲁棒性:调整参数时,考虑系统可能面临的不确定性和变化。
PID参数的调整通常需要一些实践和经验,因此,在实际应用中可能需要多次试验和调整,以找到**的参数组合。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/24287.html