
引子
说明
标准库关于这两种输入捕获都没有添加定时器分频部分说明,例程是都是捕获频率小于1K的信号。就出现了两个问题,一是不分频捕获高一点频率的信号容易出现错误(因为不分频的话基频高于检测信号很容易漏检出错)。另一个问题就是占空比会出现系统误差,在计算占空比部分稍作改动就可。查看代码即可
可以参考B站 野火 关于输入捕获部分学习,上面提到问题都有涉及。
PWM输入捕获
参考STM32固件库代码V3.5版\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Examples\TIM\PWM_Input
定时器配置+中断配置+IO配置+时钟配置
讯享网
中断服务函数
代码
#include "pwm.h" __IO uint16_t IC2Value = 0; __IO uint16_t DutyCycle = 0; __IO uint32_t Frequency = 0; void PWM_Init(void) {
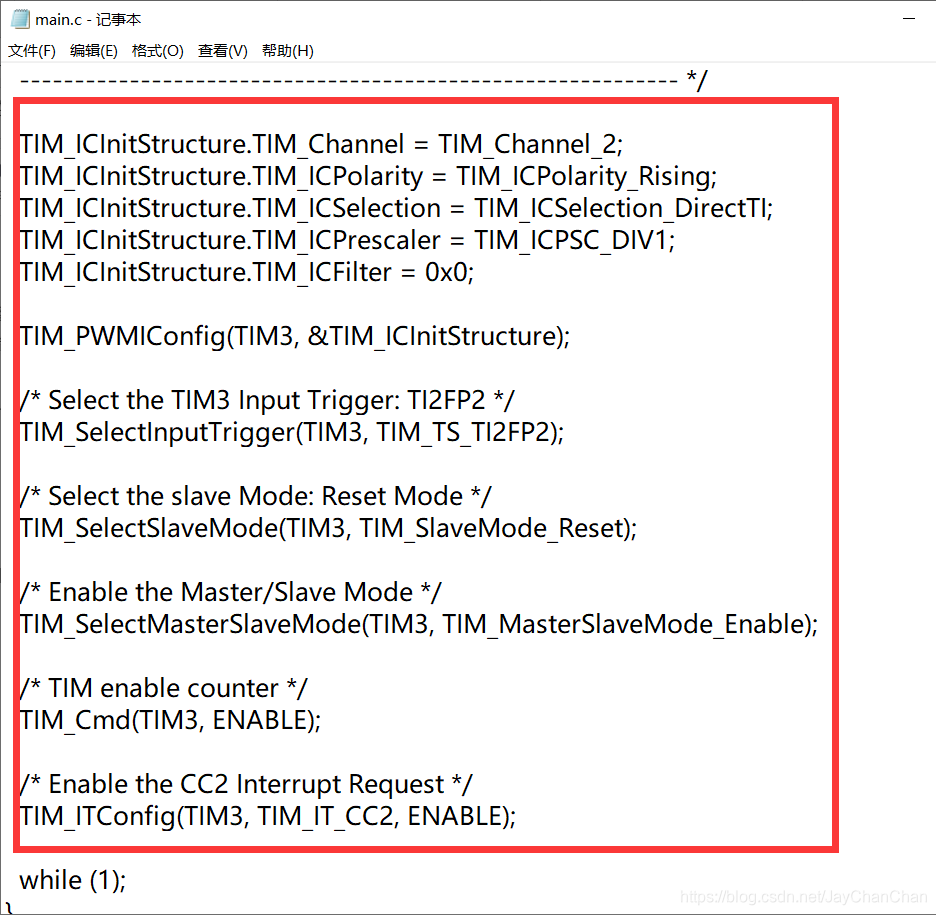
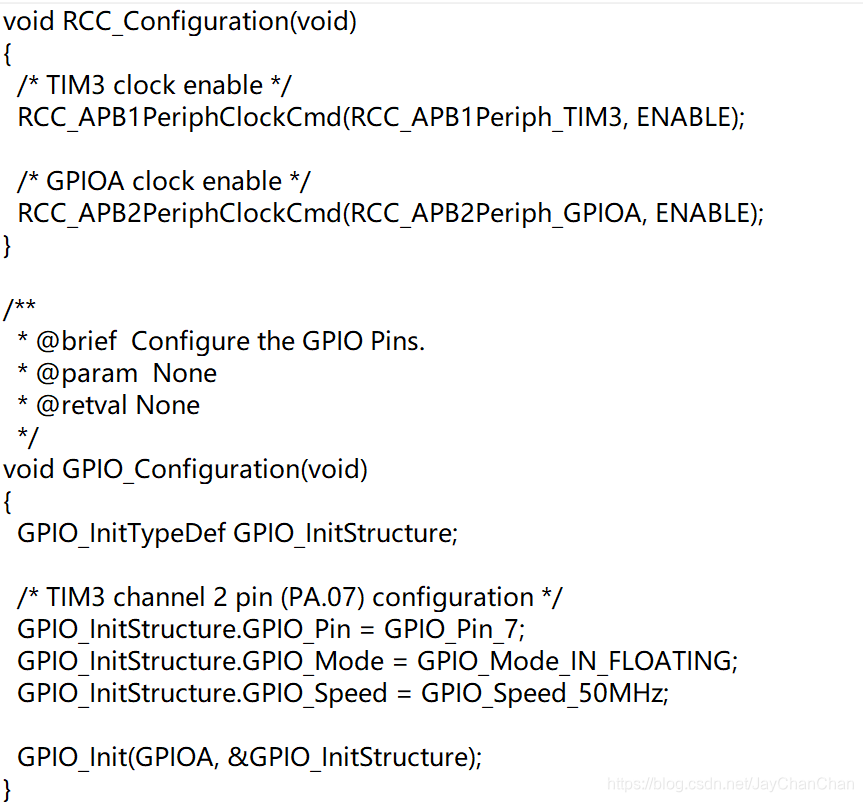
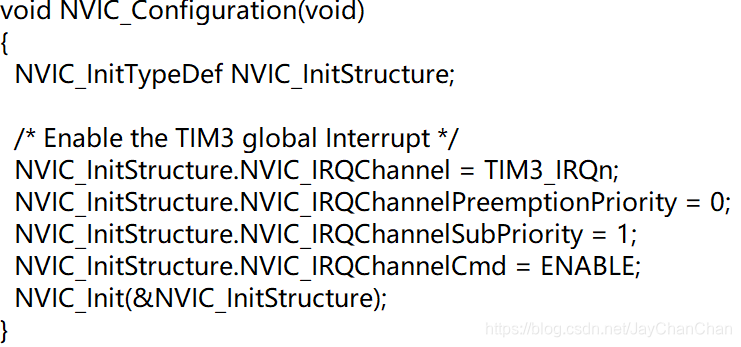
GPIO_InitTypeDef GPIO_InitStructure; TIM_ICInitTypeDef TIM_ICInitStructure; NVIC_InitTypeDef NVIC_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); TIM_TimeBaseStructure.TIM_Period = 65535; TIM_TimeBaseStructure.TIM_Prescaler = 71; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; TIM_ICInitStructure.TIM_ICFilter = 0x0; TIM_PWMIConfig(TIM3, &TIM_ICInitStructure); TIM_SelectInputTrigger(TIM3, TIM_TS_TI2FP2); TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset); TIM_SelectMasterSlaveMode(TIM3, TIM_MasterSlaveMode_Enable); TIM_Cmd(TIM3, ENABLE); TIM_ITConfig(TIM3, TIM_IT_CC2, ENABLE); } void TIM3_IRQHandler(void) {
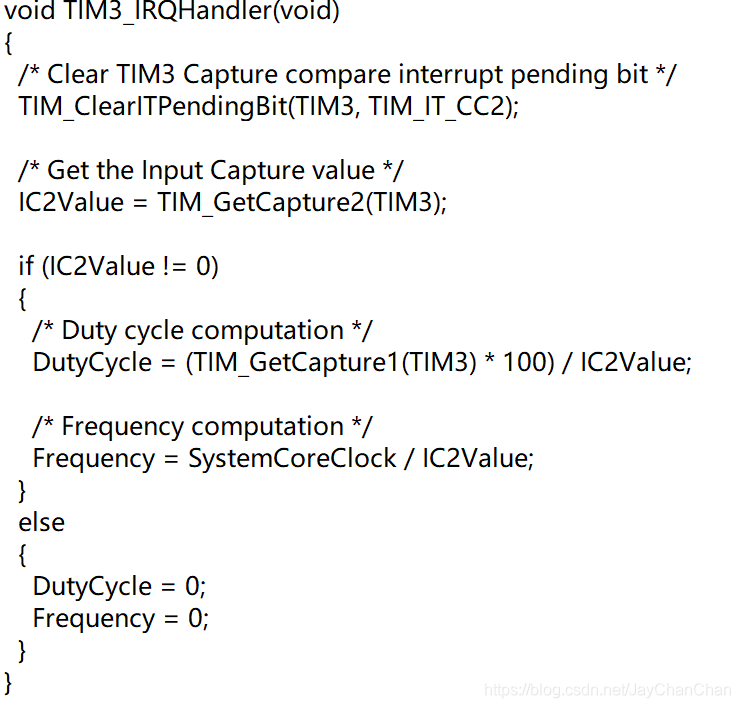
TIM_ClearITPendingBit(TIM3, TIM_IT_CC2); IC2Value = TIM_GetCapture2(TIM3); if (IC2Value != 0) {
DutyCycle = ((TIM_GetCapture1(TIM3)+1) * 100) / (IC2Value+1); Frequency = SystemCoreClock /72/(IC2Value+1); } else {
DutyCycle = 0; Frequency = 0; } } 讯享网
输入捕获驱动编写
参考STM32固件库代码V3.5版\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Examples\TIM\InputCapture

中断服务函数


代码
讯享网#include "pwm.h" __IO uint16_t IC3ReadValue1 = 0, IC3ReadValue2 = 0; __IO uint16_t IC3ReadValue3 = 0, IC3ReadValue4 = 0; __IO uint16_t CaptureNumber1 = 0,CaptureNumber2 = 0; __IO uint32_t Capture1 = 0,Capture2 = 0; __IO uint32_t TIM3Freq1 = 0,TIM3Freq2 = 0; //__IO uint32_t rising1 = 0,falling1 = 0; //__IO uint32_t rising2 = 0,falling2 = 0; u8 ch1_f,ch2_f; extern float CH1_Dut,CH2_Dut; void PWM_Init(void) {
TIM_ICInitTypeDef TIM_ICInitStructure; GPIO_InitTypeDef GPIO_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); TIM_TimeBaseStructure.TIM_Period = 65535; TIM_TimeBaseStructure.TIM_Prescaler = 71; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; TIM_ICInitStructure.TIM_ICFilter = 0x0; TIM_ICInit(TIM3, &TIM_ICInitStructure); TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; TIM_ICInitStructure.TIM_ICFilter = 0x0; TIM_ICInit(TIM3, &TIM_ICInitStructure); TIM_Cmd(TIM3, ENABLE); TIM_ITConfig(TIM3, TIM_IT_CC1|TIM_IT_CC2, ENABLE); } void TIM3_IRQHandler(void) {
if(TIM_GetITStatus(TIM3, TIM_IT_CC1) == SET) if(ch1_f==0) {
if(CaptureNumber1 == 0) {
IC3ReadValue1 = TIM_GetCapture1(TIM3); CaptureNumber1 = 1; } else if(CaptureNumber1 == 1) {
IC3ReadValue2 = TIM_GetCapture1(TIM3); if (IC3ReadValue2 > IC3ReadValue1) {
Capture1 = (IC3ReadValue2 - IC3ReadValue1); //计算周期 } else {
Capture1 = ((0xFFFF - IC3ReadValue1) + IC3ReadValue2); } TIM3Freq1 = (uint32_t) SystemCoreClock / (72*Capture1); CaptureNumber1 = 0; ch1_f = 1; IC3ReadValue1 = TIM_GetCapture1(TIM3); TIM_OC1PolarityConfig(TIM3,TIM_OCPolarity_Low); } } else {
ch1_f = 0; IC3ReadValue2 = TIM_GetCapture1(TIM3); TIM_OC1PolarityConfig(TIM3,TIM_OCPolarity_High); if(IC3ReadValue2>IC3ReadValue1) CH1_Dut = (float)(IC3ReadValue2-IC3ReadValue1)/Capture1; else CH1_Dut = (float)(0xFFFF-IC3ReadValue2+IC3ReadValue1)/Capture1; } TIM_ClearITPendingBit(TIM3, TIM_IT_CC1); if(TIM_GetITStatus(TIM3, TIM_IT_CC2) == SET) if(ch2_f==0) {
if(CaptureNumber2 == 0) {
IC3ReadValue3 = TIM_GetCapture2(TIM3); CaptureNumber2 = 1; } else if(CaptureNumber2 == 1) {
IC3ReadValue4 = TIM_GetCapture2(TIM3); if (IC3ReadValue4 > IC3ReadValue3) {
Capture2 = (IC3ReadValue4 - IC3ReadValue3); //计算周期 } else {
Capture2 = ((0xFFFF - IC3ReadValue3) + IC3ReadValue4); } TIM3Freq2 = (uint32_t) SystemCoreClock / (72*Capture2); CaptureNumber2 = 0; ch2_f = 1; IC3ReadValue3 = TIM_GetCapture2(TIM3); TIM_OC2PolarityConfig(TIM3,TIM_OCPolarity_Low); } } else {
ch2_f = 0; IC3ReadValue4 = TIM_GetCapture2(TIM3); TIM_OC2PolarityConfig(TIM3,TIM_OCPolarity_High); if(IC3ReadValue4>IC3ReadValue3) CH2_Dut = (float)(IC3ReadValue4-IC3ReadValue3)/Capture2; else CH2_Dut = (float)(0xFFFF-IC3ReadValue4+IC3ReadValue3)/Capture2; } TIM_ClearITPendingBit(TIM3, TIM_IT_CC2); }
代码补充和问题说明
PWM输入捕获大概就是读取两个寄存器数值。配置直连方式的对应CCR寄存器保存周期,另一寄存器则保存高电平周期,然后计算即可。例如CH1直连,CCR1保存周期,CCR2保存高电平周期。
输入捕获分为两部分,占空比和频率的计算,标准库例程的代码是记录两次上升沿的时间差即一个周期。而占空比则是在一直周期的基础上记录第一次上升沿时间以后改为检测低电平,检测下一次下降沿的时间做差就得到高电平持续时间。当然最后要配置会检测高电平方波下次捕获。
关于问题
1、尽量避免两路共用标志位和记录的变量的情况
2、最容易出现的问题是没有分频导致出错率明显变高。前面提到的问题可以参考另一篇博客
【STM32】关于PWM输入捕获占空比显示误差和低频显示出错的解决及经验总结
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/14511.html