
简介
g2o是一个通用的图优化库,可以应用到任何能够表示成图优化的最小二乘问题。例如BA,icp,曲线拟合等。
但它不像Ceres一样有丰富详细的学习资料。
图优化,是把优化问题表现成图(Graph)(指图论中的图)的一种方式,一组优化变量和变量之间的误差项,使用图来图来描述,使它们之间的关系更加直观化;

- 三角形和圆圈,都是顶点,待优化的变量;
- 红色与蓝色的线,都是边,描述相连顶点优化变量关系,也就是误差项;
g2o使用步骤如下:
- 定义顶点和边的类型;
- 构建图;
- 选择优化算法;
- 调用 g2o 进行优化,返回结果。

先看上半部分。SparseOptimizer 是我们最终要维护的东东。它是一个Optimizable Graph,从而也是一个Hyper Graph。一个 SparseOptimizer 含有很多个顶点 (都继承自 Base Vertex)和很多个边(继承自 BaseUnaryEdge, BaseBinaryEdge或BaseMultiEdge)。这些 Base Vertex 和 Base Edge 都是抽象的基类,而实际用的顶点和边,都是它们的派生类。我们用 SparseOptimizer.addVertex 和 SparseOptimizer.addEdge 向一个图中添加顶点和边,最后调用 SparseOptimizer.optimize 完成优化。
在优化之前,需要指定我们用的求解器和迭代算法。从图中下半部分可以看到,一个 SparseOptimizer 拥有一个 Optimization Algorithm,继承自Gauss-Newton, Levernberg-Marquardt, Powell's dogleg 三者之一(我们常用的是GN或LM)。同时,这个 Optimization Algorithm 拥有一个Solver,它含有两个部分。一个是 SparseBlockMatrix ,用于计算稀疏的雅可比和海塞; 一个是用于计算迭代过程中最关键的一步
曲线拟合问题
1、问题描述

其中a,b,c为待估计的参数,w为噪声。在程序里利用模型生成x,y的数据,在给数据添加服从高斯分布的噪声。之后用ceres优化求解参数a,b,c。
2、g2o基本类
2.1、基本模板点与边
Base Vertex 点
BaseUnaryEdge 边
BaseBinaryEdge 边
BaseMultiEdge 边
2.2、 g2o已经定义好的边和点
在types中已经提供了一些边和节点的定义,例如
相机位姿结点:g2o::VertexSE3Expmap,来自<g2o/types/sba/types_six_dof_expmap.h>;
特征点空间坐标结点:g2o::VertexSBAPointXYZ,来自<g2o/types/sba/types_sba.h>;
重投影误差:g2o::EdgeProjectXYZ2UV,来自<g2o/types/sba/types_six_dof_expmap.h>;
3、代码实现讲解
3.1、自定义顶点
// 曲线模型的顶点,模板参数:优化变量维度和数据类型 class CurveFittingVertex : public g2o::BaseVertex<3, Eigen::Vector3d> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW // 重置 virtual void setToOriginImpl() override { _estimate << 0, 0, 0; } // 更新 virtual void oplusImpl(const double *update) override { _estimate += Eigen::Vector3d(update); } // 存盘和读盘:留空 virtual bool read(istream &in) {} virtual bool write(ostream &out) const {} };讯享网
BaseVertex为g2o的基本节点类,需要继承从重写他内部的函数从而形成我们想要的新的顶点。
1、class CurveFittingVertex : public g2o::BaseVertex<3, Eigen::Vector3d>创建自己的节点
后边两个参数分别代表优化参数的维度为3,优化参数的类型为Eigen::Vector3d
2、virtual void setToOriginImpl()设置初始值
给待估计的节点设置初始值,本例中将节点设置为(0,0,0)
3、virtual void oplusImpl(const double *update)设置更新方式
采用相加的方式更新
3.2、定义边
讯享网// 误差模型 模板参数:观测值维度,类型,连接顶点类型 class CurveFittingEdge : public g2o::BaseUnaryEdge<1, double, CurveFittingVertex> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW CurveFittingEdge(double x) : BaseUnaryEdge(), _x(x) {} // 计算曲线模型误差 virtual void computeError() override { const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]); const Eigen::Vector3d abc = v->estimate(); _error(0, 0) = _measurement - std::exp(abc(0, 0) * _x * _x + abc(1, 0) * _x + abc(2, 0)); } // 计算雅可比矩阵 virtual void linearizeOplus() override { const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]); const Eigen::Vector3d abc = v->estimate(); double y = exp(abc[0] * _x * _x + abc[1] * _x + abc[2]); _jacobianOplusXi[0] = -_x * _x * y; _jacobianOplusXi[1] = -_x * y; _jacobianOplusXi[2] = -y; } virtual bool read(istream &in) {} virtual bool write(ostream &out) const {} public: double _x; // x 值, y 值为 _measurement };
首先明确边代表误差项
1、定义自己的边
class CurveFittingEdge : public g2o::BaseUnaryEdge<1, double, CurveFittingVertex>
因为只有一个节点所以继承一元边。边代表的误差如下:

所以维度为1,类型设为double,节点是 CurveFittingVertex
2、设置误差
virtual void computeError() override { //定义节点 const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]); //提取节点当前值 const Eigen::Vector3d abc = v->estimate(); //误差 _error(0, 0) = _measurement - std::exp(abc(0, 0) * _x * _x + abc(1, 0) * _x + abc(2, 0)); }_vertices[0] 对应 “class CurveFittingEdge : public g2o::BaseUnaryEdge<1, double, CurveFittingVertex>”绑定的第一个顶点 CurveFittingVertex

变量abc即为优化参数

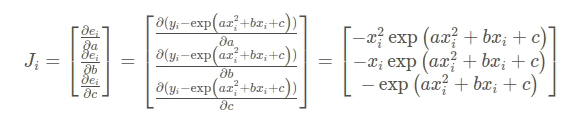
3、计算雅可比
讯享网virtual void linearizeOplus() override { const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]); const Eigen::Vector3d abc = v->estimate(); double y = exp(abc[0] * _x * _x + abc[1] * _x + abc[2]); _jacobianOplusXi[0] = -_x * _x * y; _jacobianOplusXi[1] = -_x * y; _jacobianOplusXi[2] = -y; }
3.3、构建图
auto solver = new g2o::OptimizationAlgorithmGaussNewton( g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>())); g2o::SparseOptimizer optimizer; // 图模型 optimizer.setAlgorithm(solver); // 设置求解器 optimizer.setVerbose(true); // 打开调试输出 // 往图中增加顶点 CurveFittingVertex *v = new CurveFittingVertex(); v->setEstimate(Eigen::Vector3d(ae, be, ce)); v->setId(0); optimizer.addVertex(v); for (int i = 0; i < N; i++) { CurveFittingEdge *edge = new CurveFittingEdge(x_data[i]); edge->setId(i); edge->setVertex(0, v); // 设置连接的顶点 edge->setMeasurement(y_data[i]); // 观测数值 edge->setInformation(Eigen::Matrix<double, 1, 1>::Identity() * 1 / (w_sigma * w_sigma)); // 信息矩阵:协方差矩阵之逆 optimizer.addEdge(edge); // 添加 } 1、求解器
typedef g2o::BlockSolver<g2o::BlockSolverTraits<3, 1>> BlockSolverType;
// 每个误差项优化变量维度为3,误差值维度为1;
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType;
// 线性求解器类型
g2o::OptimizationAlgorithmGaussNewton
// GN
2、增加节点
讯享网CurveFittingVertex *v = new CurveFittingVertex(); v->setEstimate(Eigen::Vector3d(ae, be, ce)); v->setId(0); optimizer.addVertex(v);
3、增加边
for (int i = 0; i < N; i++) { CurveFittingEdge *edge = new CurveFittingEdge(x_data[i]); edge->setId(i); edge->setVertex(0, v); // 设置连接的顶点 edge->setMeasurement(y_data[i]); // 观测数值 edge->setInformation(Eigen::Matrix<double, 1, 1>::Identity() * 1 / (w_sigma * w_sigma)); // 信息矩阵:协方差矩阵之逆 optimizer.addEdge(edge); // 添加 } 3.4 、进行优化
讯享网 // 执行优化 cout << "start optimization" << endl; chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); optimizer.initializeOptimization(); optimizer.optimize(10); chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "solve time cost = " << time_used.count() << " seconds. " << endl; // 输出优化值 Eigen::Vector3d abc_estimate = v->estimate(); cout << "estimated model: " << abc_estimate.transpose() << endl; return 0; }
3.5、完整代码
#include <iostream> #include <g2o/core/g2o_core_api.h> #include <g2o/core/base_vertex.h> #include <g2o/core/base_unary_edge.h> #include <g2o/core/block_solver.h> #include <g2o/core/optimization_algorithm_levenberg.h> #include <g2o/core/optimization_algorithm_gauss_newton.h> #include <g2o/core/optimization_algorithm_dogleg.h> #include <g2o/solvers/dense/linear_solver_dense.h> #include <Eigen/Core> #include <opencv2/core/core.hpp> #include <cmath> #include <chrono> using namespace std; // 曲线模型的顶点,模板参数:优化变量维度和数据类型 class CurveFittingVertex : public g2o::BaseVertex<3, Eigen::Vector3d> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW // 重置 virtual void setToOriginImpl() override { _estimate << 0, 0, 0; } // 更新 virtual void oplusImpl(const double *update) override { _estimate += Eigen::Vector3d(update); } // 存盘和读盘:留空 virtual bool read(istream &in) {} virtual bool write(ostream &out) const {} }; // 误差模型 模板参数:观测值维度,类型,连接顶点类型 class CurveFittingEdge : public g2o::BaseUnaryEdge<1, double, CurveFittingVertex> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW CurveFittingEdge(double x) : BaseUnaryEdge(), _x(x) {} // 计算曲线模型误差 virtual void computeError() override { const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]); const Eigen::Vector3d abc = v->estimate(); _error(0, 0) = _measurement - std::exp(abc(0, 0) * _x * _x + abc(1, 0) * _x + abc(2, 0)); } // 计算雅可比矩阵 virtual void linearizeOplus() override { const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]); const Eigen::Vector3d abc = v->estimate(); double y = exp(abc[0] * _x * _x + abc[1] * _x + abc[2]); _jacobianOplusXi[0] = -_x * _x * y; _jacobianOplusXi[1] = -_x * y; _jacobianOplusXi[2] = -y; } virtual bool read(istream &in) {} virtual bool write(ostream &out) const {} public: double _x; // x 值, y 值为 _measurement }; int main(int argc, char argv) { double ar = 1.0, br = 2.0, cr = 1.0; // 真实参数值 double ae = 2.0, be = -1.0, ce = 5.0; // 估计参数值 int N = 100; // 数据点 double w_sigma = 1.0; // 噪声Sigma值 double inv_sigma = 1.0 / w_sigma; cv::RNG rng; // OpenCV随机数产生器 vector<double> x_data, y_data; // 数据 for (int i = 0; i < N; i++) { double x = i / 100.0; x_data.push_back(x); y_data.push_back(exp(ar * x * x + br * x + cr) + rng.gaussian(w_sigma * w_sigma)); } // 构建图优化,先设定g2o typedef g2o::BlockSolver<g2o::BlockSolverTraits<3, 1>> BlockSolverType; // 每个误差项优化变量维度为3,误差值维度为1 typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型 // 梯度下降方法,可以从GN, LM, DogLeg 中选 auto solver = new g2o::OptimizationAlgorithmGaussNewton( g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>())); g2o::SparseOptimizer optimizer; // 图模型 optimizer.setAlgorithm(solver); // 设置求解器 optimizer.setVerbose(true); // 打开调试输出 // 往图中增加顶点 CurveFittingVertex *v = new CurveFittingVertex(); v->setEstimate(Eigen::Vector3d(ae, be, ce)); v->setId(0); optimizer.addVertex(v); // 往图中增加边 for (int i = 0; i < N; i++) { CurveFittingEdge *edge = new CurveFittingEdge(x_data[i]); edge->setId(i); edge->setVertex(0, v); // 设置连接的顶点 edge->setMeasurement(y_data[i]); // 观测数值 edge->setInformation(Eigen::Matrix<double, 1, 1>::Identity() * 1 / (w_sigma * w_sigma)); // 信息矩阵:协方差矩阵之逆 optimizer.addEdge(edge); } // 执行优化 cout << "start optimization" << endl; chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); optimizer.initializeOptimization(); optimizer.optimize(10); chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "solve time cost = " << time_used.count() << " seconds. " << endl; // 输出优化值 Eigen::Vector3d abc_estimate = v->estimate(); cout << "estimated model: " << abc_estimate.transpose() << endl; return 0; }参考
slam 基本算法 --- 分别使用 【高斯牛顿,g2o】进行曲线拟合 (理论+实践)_CGJustDoIT的博客-CSDN博客
深入理解图优化与g2o:g2o篇 - 半闲居士 - 博客园
slam十四讲
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/12563.html