
正在更新中。。。
这篇文章要跟大家一起完全搞明白卡尔曼滤波,连一个标点符号也不放过,完完全全理解明白。
如果你看不懂,那说明我写的不好。
本文是看了dr_con博士的视频后做的,建议可以去看看。
如果哪里写的不对,欢迎批评指正。
视频链接:https://space.bilibili.com//channel/collectiondetail?sid=6939
目录
正在更新中。。。
卡尔曼滤波究竟是在做什么?(数据融合)
H矩阵的意义是什么?(传感器测量值与实际值的转化)
卡尔曼滤波融合什么数据?(先验估计与测量估计)
什么是过程噪声协方差矩阵和测量噪声协方差矩阵(Q矩阵和R矩阵的意义是什么)?
噪声
mpu6050小例程(读取一个角度)
mpu6050小例程(采集角度噪声)
mpu6050小例程(计算角度噪声的方差)
mpu6050小例程(读取角加速度)
mpu6050小例程(计算角加速度方差-即角加速度噪声方差)
mpu6050小例程(计算角度与角加速度噪声协方差)
引例及思路
编辑
推导卡尔曼增益K
卡尔曼滤波究竟是在做什么?(数据融合)
卡尔曼滤波本质就是在搞数据融合。接下来我用初中公式来解释一下如何融合数据。
可能很多人不知道什么是数据融合,为了把这篇文章写明白。
所以我先用通俗的语言解释一下数据融合。
比如说我现在想称一下自己的体重,买了一台称,称了一下发现自己体重是63.5kg。
但是我从称上下来的时候,发现在上面完全没有站人的情况下,竟然显示0.3kg,于是我知道这个称不准确。
所以我又买了一个称,用新买的称称重之后发现自己的体重是60.0kg。
我知道世界上没有任何一台称是完全准确的,于是我取了平均值来当作我的真实体重。
如下图这样,我得到了我的体重是61.75kg。

取平均值的过程,就是将两个测量数据进行数据融合,得到了一个相对准确的估计数据。
已经搞明白了什么是数据融合,接下来来弄明白卡尔曼核心公式之一——卡尔曼增益的意义。
通过取两次测量数据的平均值,我得到了一个新的更准确的体重值。
但是经验告诉我,事实不是这么简单,毕竟如果我取平均值的话,那说明把两台称放在了同等地位去考虑,但现实不总是这样的。
比如有的称更好他就更准确,有的称不太好就没那么准,我们倾向于在更准的数据上面加权。所以我打算取这两个数的加权平均数来当作我的真实体重。
那么如何加权呢?
第一台称我在拼多多上面花29.9包邮买的。
第二台称我在京东上面花69.9买的。
于是根据一分价钱一分货的道理,我本能觉得贵的更好。
于是我这样做。
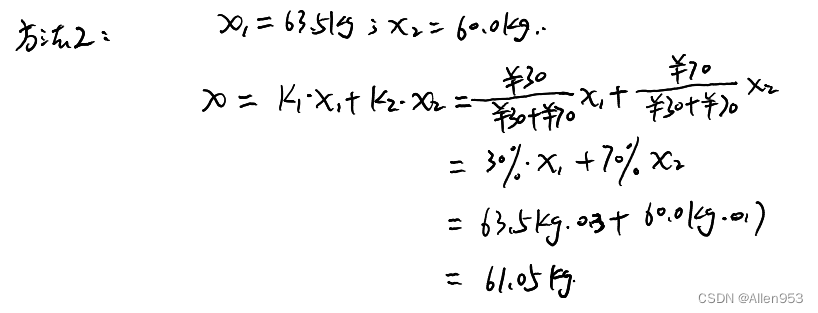
这就是对不同的称进行加权处理,比如上图中第一个称权重是30%,第二个称权重是70%,也就是说我对第一个值考虑了30%,对第二个值考虑了70%。通过这种加权的方式将两个数据进行了融合。
但是实际上我用称的价格进行权重考虑也不是很准确,毕竟购买的东西不总是一份价格一分货。
你不能说我在网上9.9元包邮买的耳机音质效果是4.9元包邮买的耳机的两倍吧!
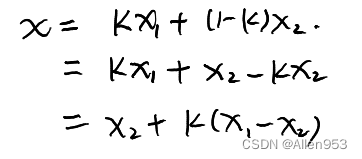
于是我考虑设第一个称的权重为K,那么第二个称的权重自然为1-K。
然后再通过一种方法(这个方法在下文,这里先不纠结)来找到一个合适的K,给两个数进行加权求得加权平均数。
如下图:
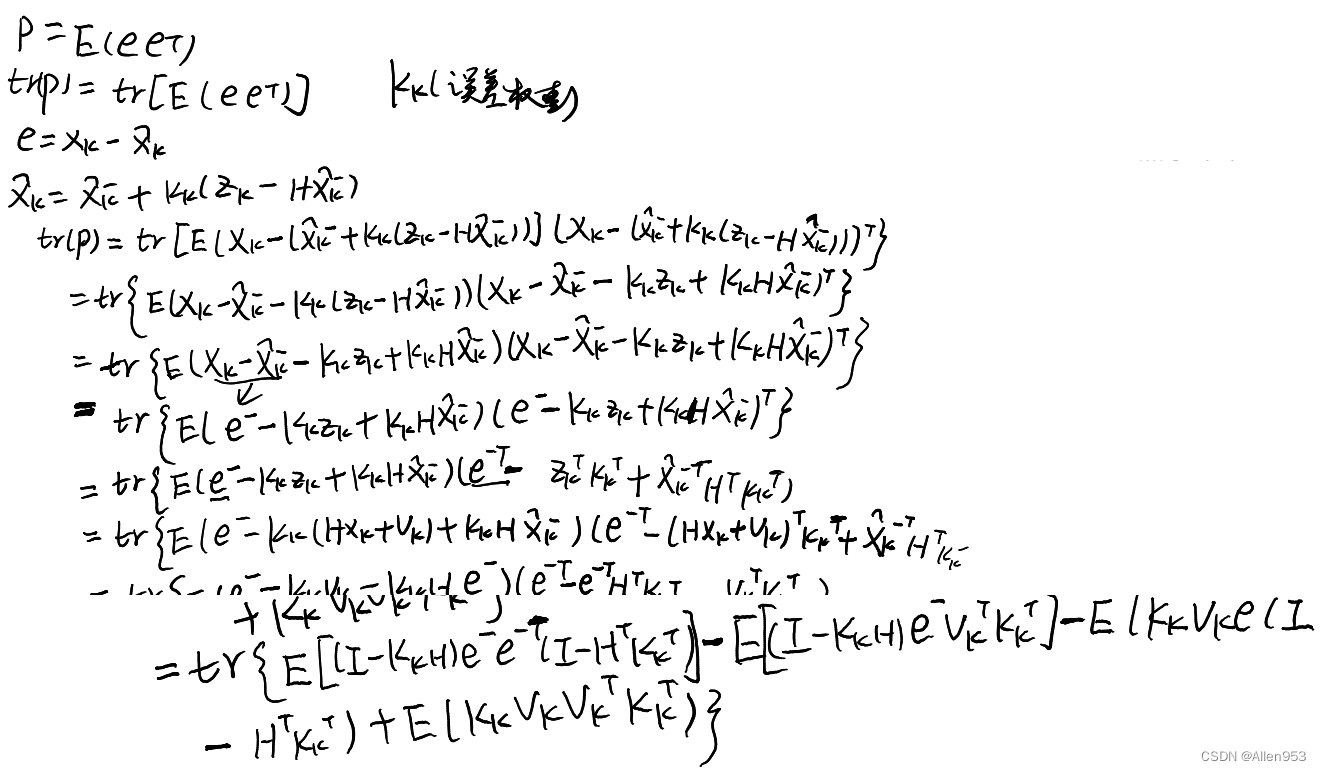
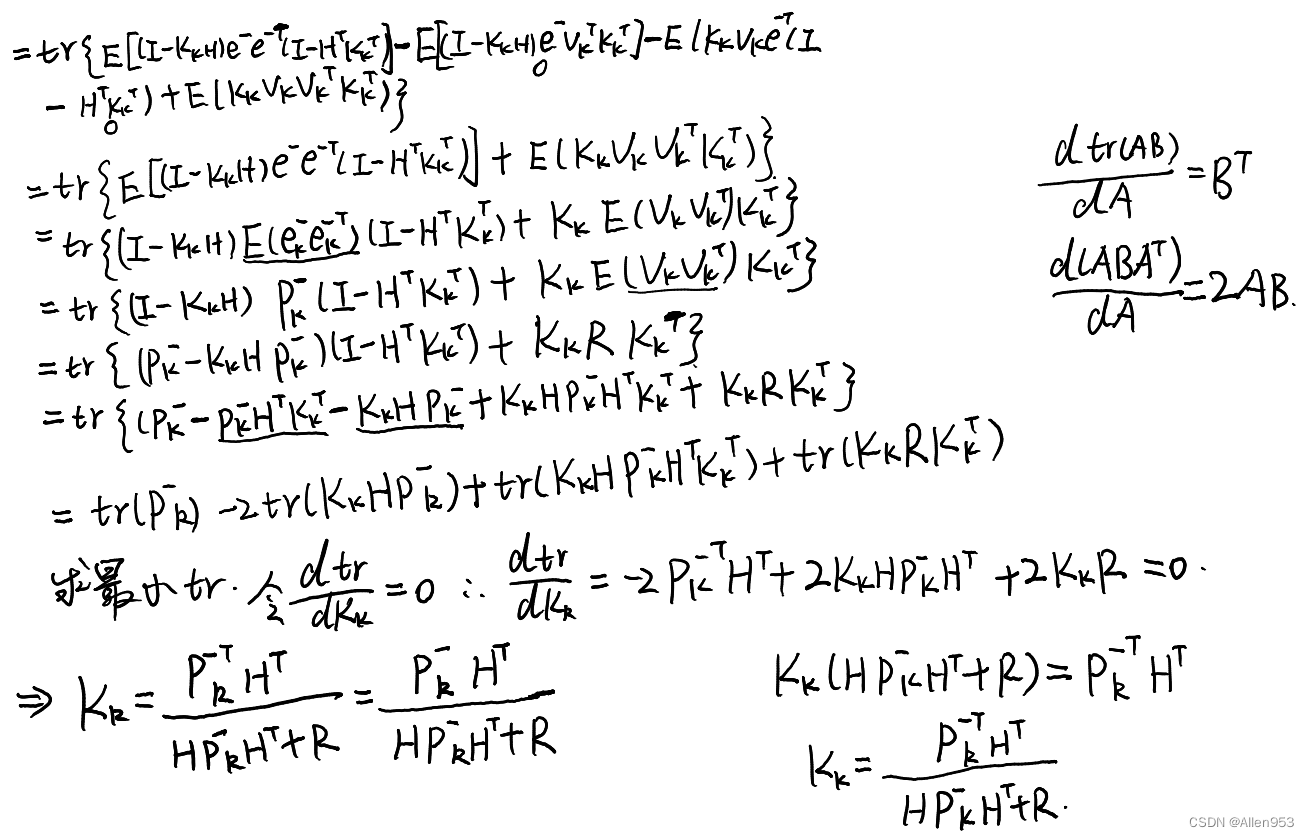
我把卡尔曼滤波五大核心公式放在下面:
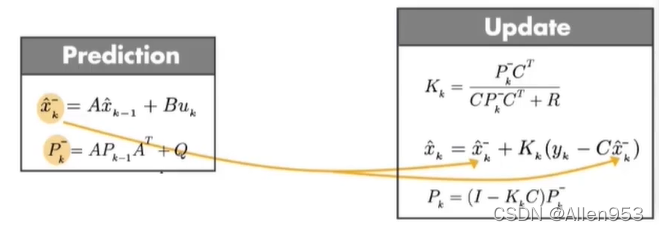
我们发现,求两个称加权平均数的过程,跟卡尔曼进行后验估计的公式很像,简直一样。
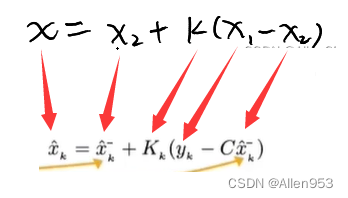
这就对了,因为卡尔曼滤波中进行后验估计的过程,就是在取先验估计与测量估计的加权平均数。
即对先验估计与测量估计两个数据进行融合(通过求加权平均数融合两个数据)得到后验估计。
而这个合适的K即权重,就是卡尔曼增益。
由于我们刚刚称重是在讨论一维数据,因此,K就是个数字。
而如果上升到多维数据,那么K就变成了矩阵了。
卡尔曼增益K矩阵——权重矩阵。
刚刚上面又说了三个新的概念,后验估计、先验估计和测量估计。
这个我们下面再解释,同时配合解释H矩阵的意义,这样理解的更深刻。
我们这里就理解了卡尔曼滤波的真正意义,其实就是在两个不太准确的值之间求加权平均数进行数据融合,这个权重即卡尔曼增益。
H矩阵的意义是什么?(传感器测量值与实际值的转化)
由于我们下面要用传感器测量系统的状态,所以我们先来搞明白H矩阵是什么。
很多同学没有学过控制理论,而大部分文章写半天都没写这些矩阵到底是啥意思,也不说这些矩阵如何求得。
本着让大家一起搞明白的原则,我们来解释一下。
我们用mpu6050的三轴加速度计来举例。
mpu6050的加速度计的三轴分量ACC_X、ACC_Y和ACC_Z均为16位有符号整数。
16位无符号整数的范围为0~2^16即0~65535,而16位无符号整数范围为-32768~32767.
而mpu6050加速度计有4个可选倍率:2g、4g、8g、16g。倍率默认为2g。假设我们设置的倍率为4g。
那么也就是说我们用单片机读取到-32768的加速度值时,也就是4g的加速度。
当读到32767这个数值的时候,也就是-4g的加速度。

我们定义以下三个2x1的矩阵。X(k)、Z(k)、V(k)。
X(k)是k时刻系统状态量,里面包含了x轴和y轴的实际加速度ax和ay。
Z(k)是k时刻传感器测量量,就是传感器测得的x轴和y轴的加速度数值zx和zy。
V(k)是k时刻传感器噪声量,就是传感器本身测量x轴或y轴加速度时的噪声vx和vy。
根据我们上面的知识,我们很容易得到下面A框中的式子,从测量值计算实际的加速度值。
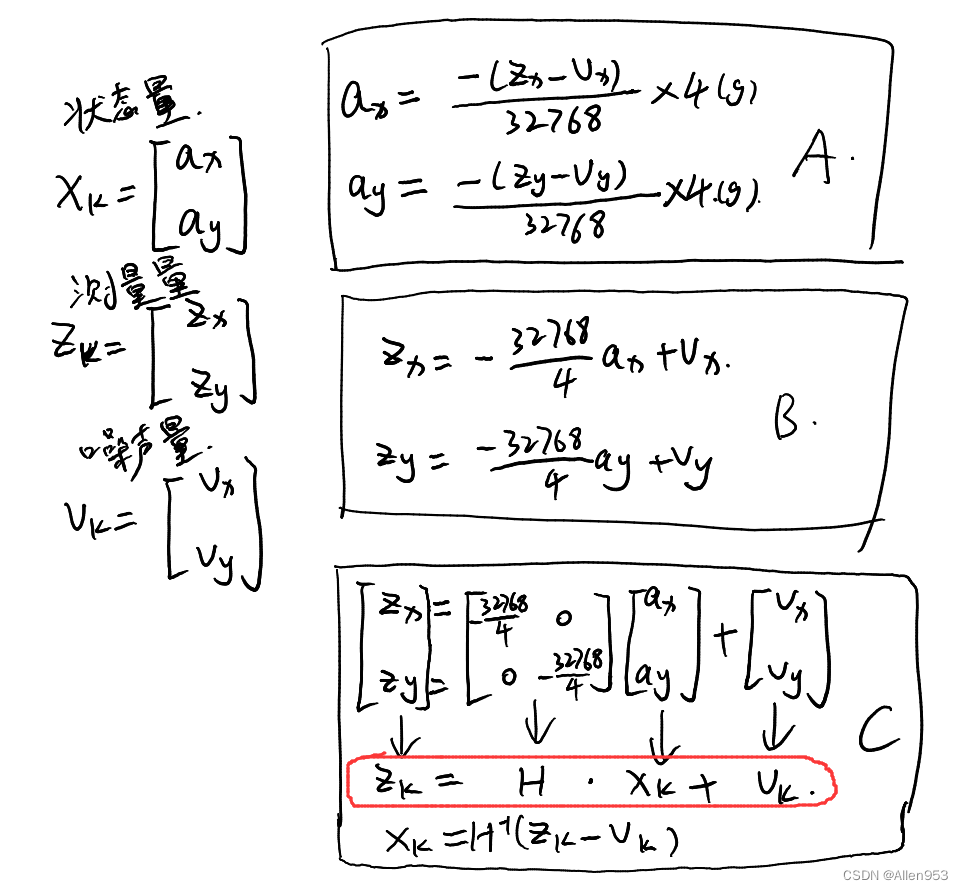
经过变形之后得到B框中的式子。
然后我们把B框中的式子写成矩阵的形式,就变成了C框中的形式。
自然就明白了H矩阵的意义,H矩阵可以让我们很方便的在传感器测量值-32768-32767与实际加速度值-4g~4g之间进行多维转换(因为同时转换了x轴和y轴加速度,是两个维度同时转换)。
而C框中红框这个式子就是我们的测量模型。
测量模型反应传感器测量值与实际状态量之间的转换关系。
卡尔曼滤波融合什么数据?(先验估计与测量估计)
上面我们搞明白了卡尔曼滤波的本质目的,就是通过数据融合得到一个相对准确的数据。
那么我们在卡尔曼滤波中,到底是在对哪些数据进行数据融合呢?
先验估计与测量估计!
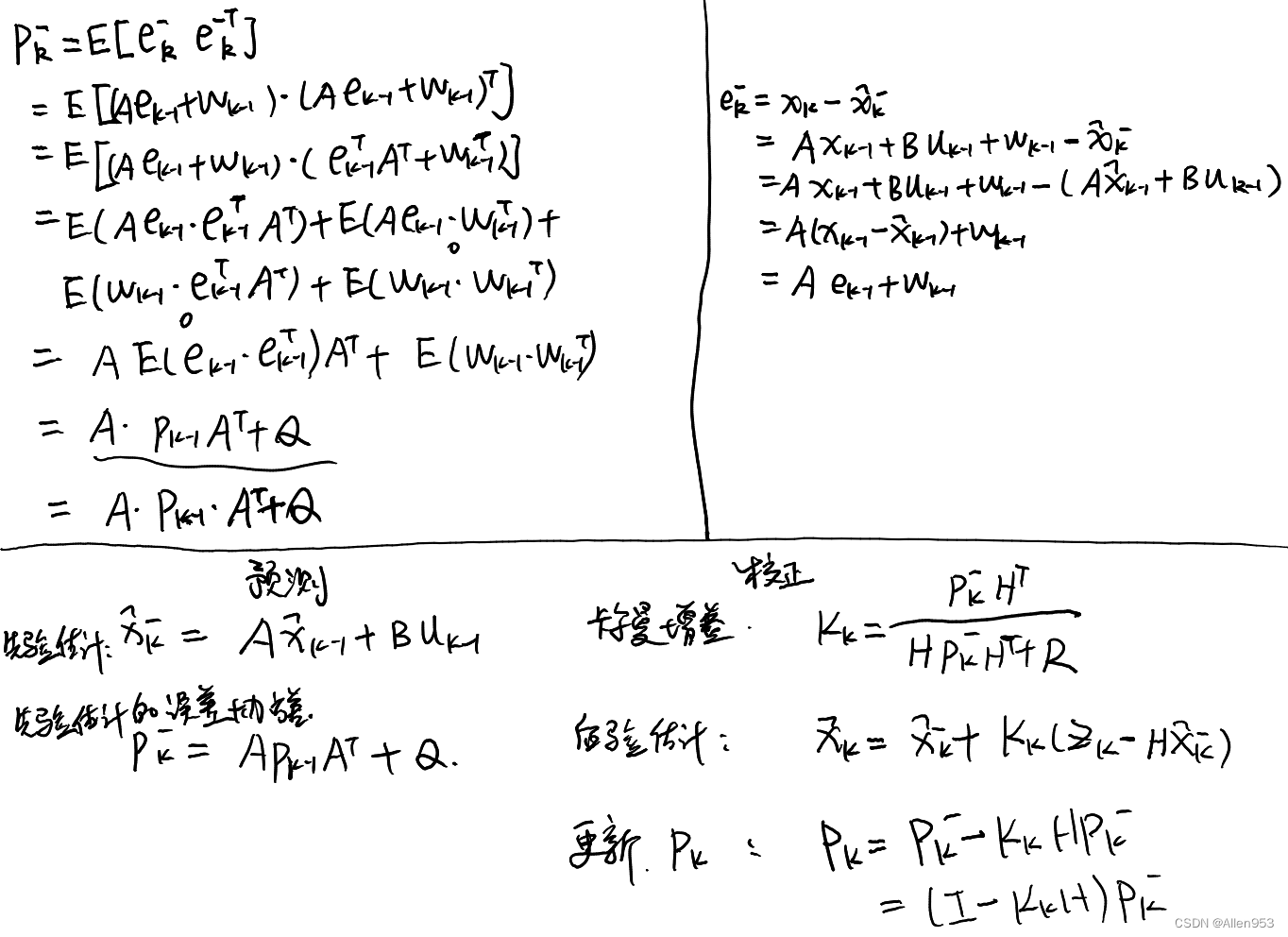
我们看下面的式子,A框里面的式子是我们的离散物理模型和测量模型。
C框里面就是我们进行估计后得到的先验估计和测量估计。
如果不懂的话,看下面小球自由落体运动的例子,这个是高中物理学的。
X(k)是小球现在的位移,X(k-1)是小球上一时刻的位移。
自由落体是匀加速的运动学模型,然后将噪声忽略变成理想化模型,也就是说这个模型不准确了。
然后靠着这个理想化模型我们进行小球的位移预测,我们估计到的这个位移数值就是先验估计。
所以就得到了先验估计。
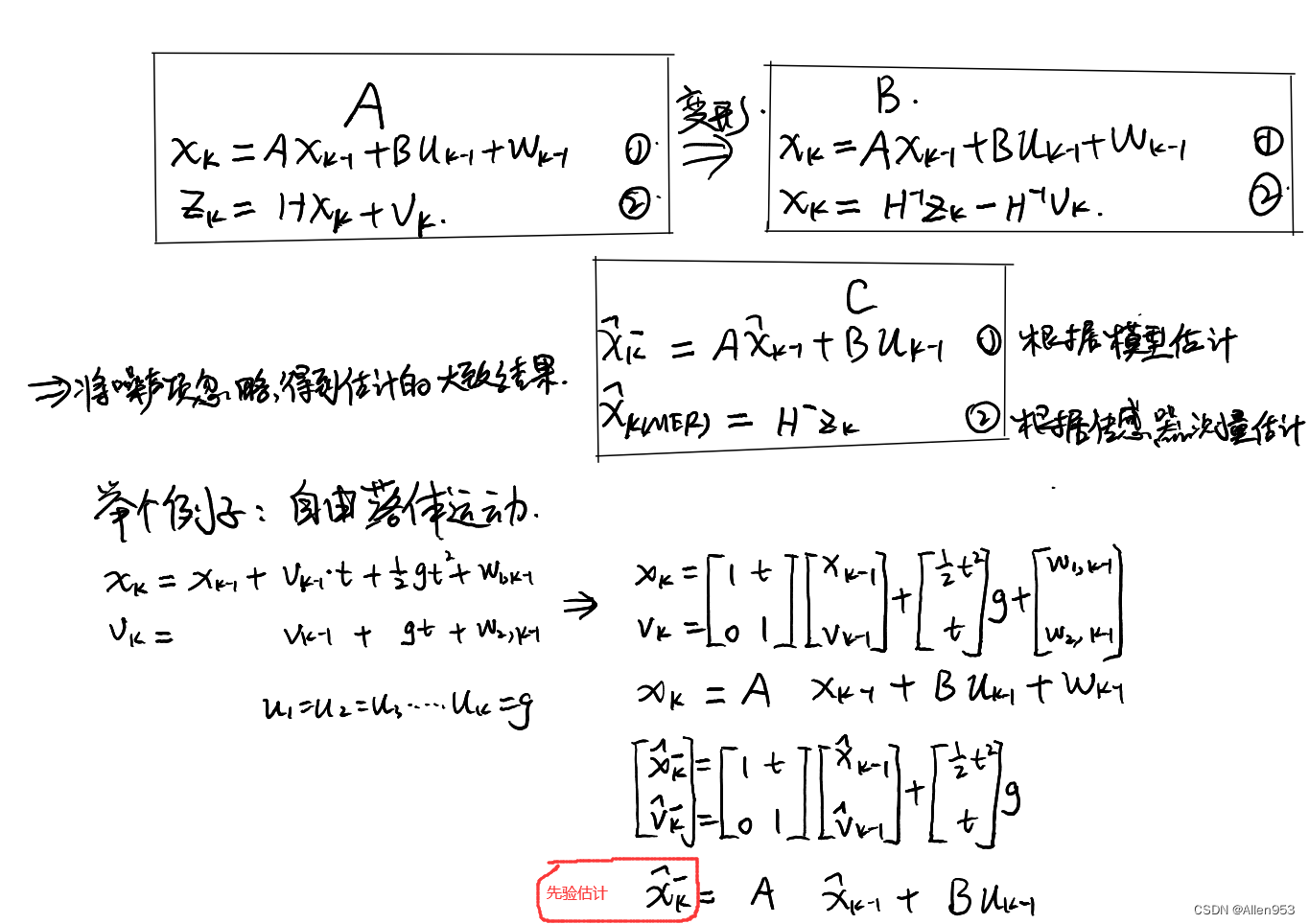
然后我们看测量估计,这时我们用上面一节的mpu6050的那个例子。
C框中是测量模型,忽略噪声之后,变成了D框中的形式。而状态量X(k)也因为我们忽略了噪声不准确了,所以这个时候我们从传感器得到的是个测量估计。

在这一节,搞明白了什么是先验估计和测量估计。
总结一下:
通过忽略模型噪声,通过数学模型进行理论上的估计得到的就是先验估计。
通过忽略测量噪声,通过传感器测量数值进行估计得到的就是测量估计。
那么接下来就是通过卡尔曼增益将他们融合起来了,就是求取加权平均值。
什么是过程噪声协方差矩阵和测量噪声协方差矩阵(Q矩阵和R矩阵的意义是什么)?
Q是过程噪声协方差矩阵,那什么是过程噪声?什么是过程噪声协方差矩阵?
很多文章说Q矩阵和R矩阵靠经验设置或者测量得到,但是你倒是告诉我怎么靠经验得到,或者怎么测量出来啊!说了跟没说一样。今天我们一定要搞明白这两个矩阵如何精确得跑到手掌心。
比如我有一个mpu6050,他集成了三轴加速度和三轴角速度传感器,能够输出这六个状态量.
但是我实际工作时由于是做的平衡小车,因此只需要知道一个倾角就行。
所以我现在只专注于mpu6050传感器的一个倾角。
噪声
这里噪声我们理解成一个高斯分布。
mpu6050小例程(读取一个角度)
这里介绍一个mpu6050小例程,因为接下来要边说边做实验了,所以先把实验搞明白。方便接下来采集数据,分离噪声,计算方差和协方差以及协方差矩阵等一系列操作。
mpu6050中,比较重要的两个倾角是俯仰角和横滚角,航向角通常代表前进的方向,所以暂时先不考虑航向角。
我们先只对俯仰角和横滚角中的一个倾角进行研究分析。
#include "Wire.h" //I2C通讯库 #include "I2Cdev.h" // #include "MPU6050.h" //mpu6050库 MPU6050 mympu; //定义mympu对象 float pi=3.; //Π的值,用于单位转换 float AcceRatio=16384.0; //加速度计比例系数 float GyroRatio=131.0; //陀螺仪比例系数 //定义3个变量,用于存储倾角数据 float angle_x=0.0,angle_y=0.0,angle_z=0.0; int16_t ax=0,ay=0,az=0,gx=0,gy=0,gz=0; //加速度计陀螺仪原始数据 float accx=0.0,accy=0.0,accz=0.0; void setup(){ Wire.begin(18, 5, );//开启iic通讯,mpu6050的数据传输协议为iic Serial.begin();//打开串口 mympu.initialize(); //初始化mpu6050 } void loop() { //通过调用该函数,一次性从mpu6050获取6轴数据 mympu.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); accx=ax/AcceRatio; //x轴加速度 accy=ay/AcceRatio; //y轴加速度 accz=az/AcceRatio; //z轴加速度 angle_x=(atan(accx/accz)*180/pi); //计算身体前后的倾角,绕y轴的转角 angle_y=(atan(accy/accz)*180/pi); //计算身体左右的倾角,绕x轴的转角 Serial.print(az);Serial.print(" ");//将z轴加速度原始数据输出 Serial.print(accx);Serial.print(" ");//将3轴加速度输出(单位:g) Serial.print(accy);Serial.print(" ");//将两个转角从串口输出 Serial.print(accz);Serial.print(" ");//将两个转角从串口输出 Serial.print(angle_x);Serial.print(" ");//将两个转角从串口输出 Serial.print(angle_y);Serial.println(" "); delay(100); }讯享网
输出用加速度计解算出来的两轴倾角
讯享网#include "Wire.h" //I2C通讯库 #include "I2Cdev.h" // #include "MPU6050.h" //mpu6050库 const byte MotorDriverEn = 5; //电机驱动器使能 MPU6050 mympu; //定义mympu对象 float pi=3.; //Π的值,用于单位转换 float AcceRatio=16384.0; //加速度计比例系数 float GyroRatio=131.0; //陀螺仪比例系数 //定义3个变量,用于存储倾角数据 float angle_x=0.0,angle_y=0.0,angle_z=0.0; int16_t ax=0,ay=0,az=0,gx=0,gy=0,gz=0; //加速度计陀螺仪原始数据 float accx=0.0,accy=0.0,accz=0.0; void setup(){ Wire.begin();//开启iic通讯,mpu6050的数据传输协议为iic Serial.begin();//打开串口 pinMode(MotorDriverEn,OUTPUT); digitalWrite(MotorDriverEn,LOW); mympu.initialize(); //初始化mpu6050 } void loop() { //通过调用该函数,一次性从mpu6050获取6轴数据 // Serial.println(millis()); mympu.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); accx=ax/AcceRatio; //x轴加速度 accy=ay/AcceRatio; //y轴加速度 accz=az/AcceRatio; //z轴加速度 angle_x=(atan(accx/accz)*180/pi); //计算身体前后的倾角,绕y轴的转角 angle_y=(atan(accy/accz)*180/pi); //计算身体左右的倾角,绕x轴的转角 Serial.print(ax);Serial.print(" ");//将z轴加速度原始数据输出 Serial.print(ay);Serial.print(" ");//将3轴加速度输出(单位:g) Serial.print(az);Serial.print(" ");//将两个转角从串口输出 Serial.print(gx);Serial.print(" ");//将z轴加速度原始数据输出 Serial.print(gy);Serial.print(" ");//将3轴加速度输出(单位:g) Serial.print(gz);Serial.print(" ");//将两个转角从串口输出 Serial.print(accz);Serial.print(" ");//将两个转角从串口输出 Serial.print(angle_x);Serial.print(" ");//将两个转角从串口输出 Serial.print(angle_y);Serial.println(" "); // delay(100); }
mpu6050小例程(采集角度噪声)
#include "Wire.h" //I2C通讯库 #include "I2Cdev.h" // #include "MPU6050.h" //mpu6050库 MPU6050 mympu; //定义mympu对象 float pi=3.; //Π的值,用于单位转换 float AcceRatio=16384.0; //加速度计比例系数 float GyroRatio=131.0; //陀螺仪比例系数 //定义3个变量,用于存储倾角数据 float angle_x=0.0,angle_y=0.0,angle_z=0.0; int16_t ax=0,ay=0,az=0,gx=0,gy=0,gz=0; //加速度计陀螺仪原始数据 float accx=0.0,accy=0.0,accz=0.0; void setup(){ Wire.begin(33, 32, ); //开启iic通讯,mpu6050的数据传输协议为iic Serial.begin(); //打开串口 mympu.initialize(); //初始化mpu6050 } void loop() { float angle_ys[100],angle_yerr[100]; float angle_y_sum=0.0; //采集到的100个倾角的和 float angle_y_ave=0.0; //倾角平均值 float angle_yerr_sum=0.0; float angle_yerr_ave=0.0; //噪声平均值 float angle_yerr_sigma2=0.0; //噪声方差 for(int i=0;i<100;i++) { //通过调用该函数,一次性从mpu6050获取6轴数据,ax,ay,az分别是x轴,y轴,z轴加速度;gx,gy,gz分别是角速度 mympu.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); accx=ax/AcceRatio; //x轴加速度 accy=ay/AcceRatio; //y轴加速度 accz=az/AcceRatio; //z轴加速度 angle_x=(atan(accx/accz)*180/pi); //计算前后的倾角,绕y轴的转角 angle_y=(atan(accy/accz)*180/pi); //计算左右的倾角,绕x轴的转角 angle_ys[i]=angle_y; angle_y_sum+=angle_y; //只研究angle_y Serial.print(angle_y);Serial.print(" "); delay(10); } Serial.println(); angle_y_ave=angle_y_sum/100.0; for(int i=0;i<100;i++) { angle_yerr[i]=angle_ys[i]-angle_y_ave; //现在angle_yerr数组存的即为噪声 Serial.print(angle_yerr[i]);Serial.print(" "); } Serial.println(); delay(10000); }用Baize_Servo1主板的代码:
讯享网#include "Wire.h" //I2C通讯库 #include "I2Cdev.h" // #include "MPU6050.h" //mpu6050库 #define times 100 MPU6050 mympu; //定义mympu对象 float pi=3.; //Π的值,用于单位转换 float AcceRatio=16384.0; //加速度计比例系数 float GyroRatio=131.0; //陀螺仪比例系数 //定义3个变量,用于存储倾角数据 float angle_x=0.0,angle_y=0.0,angle_z=0.0; int16_t ax=0,ay=0,az=0,gx=0,gy=0,gz=0; //加速度计陀螺仪原始数据 float accx=0.0,accy=0.0,accz=0.0; void setup(){ Wire.begin(); //开启iic通讯,mpu6050的数据传输协议为iic Serial.begin(); //打开串口 mympu.initialize(); //初始化mpu6050 } void loop() { float angle_ys[times],angle_yerr[times]; //采集100次倾角 float angle_y_sum=0.0; //采集到的100个倾角的和 float angle_y_ave=0.0; //倾角平均值 float angle_yerr_sum=0.0; float angle_yerr_ave=0.0; //噪声平均值 float angle_yerr_sigma2=0.0; //噪声方差 for(int i=0;i<times;i++) { //通过调用该函数,一次性从mpu6050获取6轴数据,ax,ay,az分别是x轴,y轴,z轴加速度;gx,gy,gz分别是角速度 mympu.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); accx=ax/AcceRatio; //x轴加速度 accy=ay/AcceRatio; //y轴加速度 accz=az/AcceRatio; //z轴加速度 angle_x=(atan(accx/accz)*180/pi); //计算前后的倾角,绕y轴的转角 angle_y=(atan(accy/accz)*180/pi); //计算左右的倾角,绕x轴的转角 angle_ys[i]=angle_y; angle_y_sum+=angle_y; //只研究angle_y Serial.print(angle_y);Serial.print(" "); delay(10); } Serial.println(); angle_y_ave=angle_y_sum/100.0; for(int i=0;i<times;i++) { angle_yerr[i]=angle_ys[i]-angle_y_ave; //现在angle_yerr数组存的即为噪声 Serial.print(angle_yerr[i]);Serial.print(" "); } Serial.println(); delay(10000); }
采集陀螺仪噪声
#include "Wire.h" //I2C通讯库 #include "I2Cdev.h" // #include "MPU6050.h" //mpu6050库 #define times 100 MPU6050 mympu; //定义mympu对象 float pi=3.; //Π的值,用于单位转换 float AcceRatio=16384.0; //加速度计比例系数 float GyroRatio=131.0; //陀螺仪比例系数 //定义3个变量,用于存储倾角数据 float angle_x=0.0,angle_y=0.0,angle_z=0.0; int16_t ax=0,ay=0,az=0,gx=0,gy=0,gz=0; //加速度计陀螺仪原始数据 float accx=0.0,accy=0.0,accz=0.0; float grox=0.0,groy=0.0,groz=0.0; void setup(){ Wire.begin(); //开启iic通讯,mpu6050的数据传输协议为iic Serial.begin(); //打开串口 mympu.initialize(); //初始化mpu6050 } void loop() { float angle_ys[times],angle_yerr[times],gx_ys[times],gx_yerr[times],gy_ys[times],gy_yerr[times]; float angle_y_sum=0.0,gx_sum=0.0,gy_sum=0.0; //采集到的100个倾角的和 float angle_y_ave=0.0,gx_ave=0.0,gy_ave=0.0; //倾角平均值 float angle_yerr_sum=0.0; float angle_yerr_ave=0.0; //噪声平均值 float angle_yerr_sigma2=0.0; //噪声方差 for(int i=0;i<times;i++) { //通过调用该函数,一次性从mpu6050获取6轴数据,ax,ay,az分别是x轴,y轴,z轴加速度;gx,gy,gz分别是角速度 mympu.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); accx=ax/AcceRatio; //x轴加速度 accy=ay/AcceRatio; //y轴加速度 accz=az/AcceRatio; //z轴加速度 grox=gx/GyroRatio; groy=gy/GyroRatio; groz=gz/GyroRatio; angle_x=(atan(accx/accz)*180/pi); //计算前后的倾角,绕y轴的转角 angle_y=(atan(accy/accz)*180/pi); //计算左右的倾角,绕x轴的转角 angle_ys[i]=angle_y; angle_y_sum+=angle_y; // gx_ys[i]=grox; gx_sum+=grox; gy_ys[i]=groy; gy_sum+=groy; Serial.print(grox);Serial.print(" "); delay(10); } Serial.println(); angle_y_ave=angle_y_sum/100.0; gx_ave=gx_sum/100.0; gy_ave=gy_sum/100.0; for(int i=0;i<times;i++) { angle_yerr[i]=angle_ys[i]-angle_y_ave; //现在angle_yerr数组存的即为噪声 gx_yerr[i]=gx_ys[i]-gx_ave; gy_yerr[i]=gy_ys[i]-gy_ave; Serial.print(gx_yerr[i]);Serial.print(" "); } Serial.println(); delay(10000); }mpu6050小例程(计算角度噪声的方差)
讯享网#include "Wire.h" //I2C通讯库 #include "I2Cdev.h" // #include "MPU6050.h" //mpu6050库 MPU6050 mympu; //定义mympu对象 float pi=3.; //Π的值,用于单位转换 float AcceRatio=16384.0; //加速度计比例系数 float GyroRatio=131.0; //陀螺仪比例系数 //定义3个变量,用于存储倾角数据 float angle_x=0.0,angle_y=0.0,angle_z=0.0; int16_t ax=0,ay=0,az=0,gx=0,gy=0,gz=0; //加速度计陀螺仪原始数据 float accx=0.0,accy=0.0,accz=0.0; void setup(){ Wire.begin(33, 32, ); //开启iic通讯,mpu6050的数据传输协议为iic Serial.begin(); //打开串口 mympu.initialize(); //初始化mpu6050 } void loop() { float angle_ys[100],angle_yerr[100]; float angle_y_sum=0.0; //采集到的100个倾角的和 float angle_y_ave=0.0; //倾角平均值 float angle_yerr_sum=0.0; float angle_yerr_ave=0.0; //噪声平均值 float angle_yerr_sigma2=0.0; //噪声方差 for(int i=0;i<100;i++) { //通过调用该函数,一次性从mpu6050获取6轴数据,ax,ay,az分别是x轴,y轴,z轴加速度;gx,gy,gz分别是角速度 mympu.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); accx=ax/AcceRatio; //x轴加速度 accy=ay/AcceRatio; //y轴加速度 accz=az/AcceRatio; //z轴加速度 angle_x=(atan(accx/accz)*180/pi); //计算前后的倾角,绕y轴的转角 angle_y=(atan(accy/accz)*180/pi); //计算左右的倾角,绕x轴的转角 angle_ys[i]=angle_y; angle_y_sum+=angle_y; //只研究angle_y Serial.print(angle_y);Serial.print(" "); delay(10); } Serial.println(); angle_y_ave=angle_y_sum/100.0; for(int i=0;i<100;i++) { angle_yerr[i]=angle_ys[i]-angle_y_ave; //现在angle_yerr数组存的即为噪声 angle_yerr_sum+=angle_yerr[i]; Serial.print(angle_yerr[i]);Serial.print(" "); } Serial.println(); angle_yerr_ave=angle_yerr_sum/100.0; //计算噪声方差 for(int i=0;i<100;i++) angle_yerr_sigma2+=(angle_yerr[i]-angle_yerr_ave)*(angle_yerr[i]-angle_yerr_ave); angle_yerr_sigma2=angle_yerr_sigma2/100.0; Serial.println(angle_yerr_sigma2,4); delay(10000); }
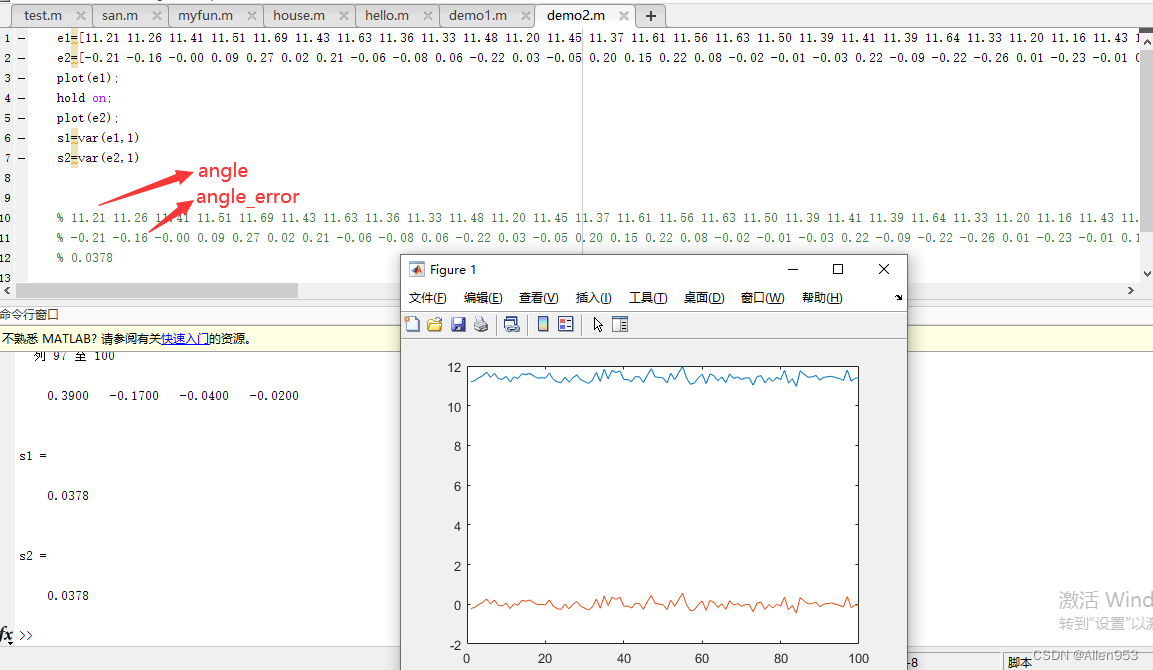
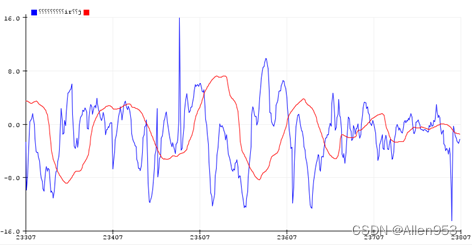
因为我们在arduino程序中从串口分别输出了三行数据,第一行是角度angle,第二行是噪声angle_error,第三行是噪声的方差。
所以,我们很方便的就可以把这些数据放到matlab中进行验证。我们发现angle和angle_error的方差一模一样,这就对了,因为angle本身包含真值和噪声,而真值就是这个时候的真实倾角,由于我们把mpu6050静止放置,所以这个是一个客观的定值,不会改变,所以他的方差肯定是0.所以angle的方差实际上就是完全受噪声影响的,跟噪声方差等价。
从matlab中绘的图也可以看出来。
过程噪声就是先验估计的误差。
mpu6050小例程(读取角加速度)
三个角速度分量均以“度/秒”为单位,能够表示的角速度范围,即倍率可统一设定,有4个可选倍率:250度/秒、500度/秒、1000度/秒、2000度/秒。倍率默认设定为250度/秒。
#include "Wire.h" //I2C通讯库 #include "I2Cdev.h" // #include "MPU6050.h" //mpu6050库 MPU6050 mympu; //定义mympu对象 float pi=3.; //Π的值,用于单位转换 float AcceRatio=16384.0; //加速度计比例系数 float BetaRatio=32768.0; //加速度计比例系数 float GyroRatio=131.0; //陀螺仪比例系数 //定义3个变量,用于存储倾角数据 float angle_x=0.0,angle_y=0.0,angle_z=0.0; float beta_x=0.0,beta_y=0.0,beta_z=0.0; int16_t ax=0,ay=0,az=0,gx=0,gy=0,gz=0; //加速度计陀螺仪原始数据 float accx=0.0,accy=0.0,accz=0.0; void setup(){ Wire.begin(33, 32, ); //开启iic通讯,mpu6050的数据传输协议为iic Serial.begin(); //打开串口 mympu.initialize(); //初始化mpu6050 } void loop() { //通过调用该函数,一次性从mpu6050获取6轴数据,ax,ay,az分别是x轴,y轴,z轴加速度;gx,gy,gz分别是角速度 mympu.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); beta_x=250.0*gx/BetaRatio; //x轴角速度 beta_y=250.0*gy/BetaRatio; //y轴角速度 beta_z=250.0*gz/BetaRatio; //z轴角速度 Serial.print(beta_x);Serial.print(","); Serial.print(beta_y);Serial.print(","); Serial.print(beta_z);Serial.println(); delay(1); }mpu6050小例程(计算角加速度方差-即角加速度噪声方差)
讯享网#include "Wire.h" //I2C通讯库 #include "I2Cdev.h" // #include "MPU6050.h" //mpu6050库 MPU6050 mympu; //定义mympu对象 float pi=3.; //Π的值,用于单位转换 float AcceRatio=16384.0; //加速度计比例系数 float BetaRatio=32768.0; //加速度计比例系数 float GyroRatio=131.0; //陀螺仪比例系数 //定义3个变量,用于存储倾角数据 float angle_x=0.0,angle_y=0.0,angle_z=0.0; float beta_x=0.0,beta_y=0.0,beta_z=0.0; int16_t ax=0,ay=0,az=0,gx=0,gy=0,gz=0; //加速度计陀螺仪原始数据 float accx=0.0,accy=0.0,accz=0.0; void setup(){ Wire.begin(33, 32, ); //开启iic通讯,mpu6050的数据传输协议为iic Serial.begin(); //打开串口 mympu.initialize(); //初始化mpu6050 } void loop() { float beta_xs[100],angle_yerr[100]; float beta_x_sum=0.0,beta_x_ave=0.0; float angle_yerr_sigma2=0.0; //噪声方差 for(int i=0;i<100;i++) { //通过调用该函数,一次性从mpu6050获取6轴数据,ax,ay,az分别是x轴,y轴,z轴加速度;gx,gy,gz分别是角速度 mympu.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); beta_x=250.0*gx/BetaRatio; //x轴角速度 beta_xs[i]=beta_x; Serial.print(beta_x);Serial.print(" "); beta_x_sum+=beta_x; delay(10); } Serial.println(); beta_x_ave=beta_x_sum/100.0; for(int i=0;i<100;i++) angle_yerr_sigma2+=(beta_xs[i]-beta_x_ave)*(beta_xs[i]-beta_x_ave); angle_yerr_sigma2=angle_yerr_sigma2/100.0; Serial.println(angle_yerr_sigma2,4); delay(10000); }
mpu6050小例程(计算角度与角加速度噪声协方差)
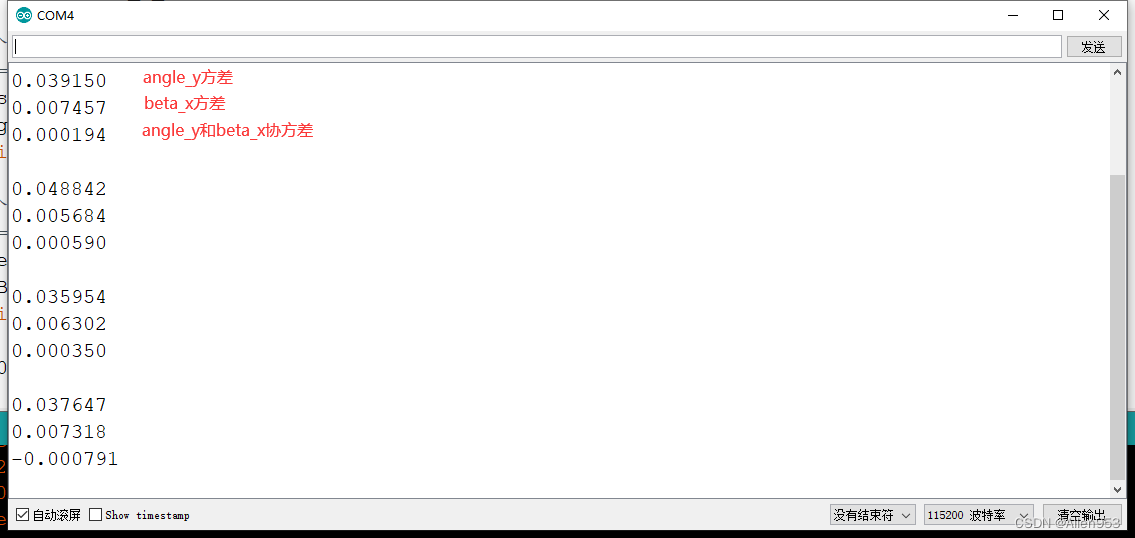
#include "Wire.h" //I2C通讯库 #include "I2Cdev.h" // #include "MPU6050.h" //mpu6050库 MPU6050 mympu; //定义mympu对象 float pi=3.; //Π的值,用于单位转换 float AcceRatio=16384.0; //加速度计比例系数 float BetaRatio=32768.0; //加速度计比例系数 float GyroRatio=131.0; //陀螺仪比例系数 //定义3个变量,用于存储倾角数据 float angle_x=0.0,angle_y=0.0,angle_z=0.0; float beta_x=0.0,beta_y=0.0,beta_z=0.0; int16_t ax=0,ay=0,az=0,gx=0,gy=0,gz=0; //加速度计陀螺仪原始数据 float accx=0.0,accy=0.0,accz=0.0; void setup(){ Wire.begin(33, 32, ); //开启iic通讯,mpu6050的数据传输协议为iic Serial.begin(); //打开串口 mympu.initialize(); //初始化mpu6050 } void loop() { float angle_ys[100]; //采集100个倾角angle_y存储到angle_ys数组 float angle_y_sum=0.0,angle_y_ave=0.0; //100个倾角angle_y之和、平均值 float angle_y_sigma2=0.0; //倾角angle_y噪声方差 float beta_xs[100]; //采集100个角速度beta_x存储到beta_xs数组 float beta_x_sum=0.0,beta_x_ave=0.0; //100个角速度beta_x之和、平均值 float beta_x_sigma2=0.0; //角速度beta_x噪声方差 float CovAngleyBetax=0.0; for(int i=0;i<100;i++) { //通过调用该函数,一次性从mpu6050获取6轴数据,ax,ay,az分别是x轴,y轴,z轴加速度;gx,gy,gz分别是角速度 mympu.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); accy=ay/AcceRatio; //y轴加速度 accz=az/AcceRatio; //z轴加速度 angle_y=(atan(accy/accz)*180/pi); //计算倾角angle_y angle_ys[i]=angle_y; angle_y_sum+=angle_y; //累加angle_y用于求取平均值 beta_x=250.0*gx/BetaRatio; //x轴角速度 beta_xs[i]=beta_x; //累加beta_x用于求取平均值 beta_x_sum+=beta_x; delay(10); } Serial.println(); angle_y_ave=angle_y_sum/100.0; //100个倾角平均值angle_y_ave beta_x_ave=beta_x_sum/100.0; //100个角速度平均值beta_x_ave //计算100个倾角angle_y方差 for(int i=0;i<100;i++) angle_y_sigma2+=(angle_ys[i]-angle_y_ave)*(angle_ys[i]-angle_y_ave); angle_y_sigma2=angle_y_sigma2/100.0; Serial.println(angle_y_sigma2,6); //计算100个角速度beta_x方差 for(int i=0;i<100;i++) beta_x_sigma2+=(beta_xs[i]-beta_x_ave)*(beta_xs[i]-beta_x_ave); beta_x_sigma2=beta_x_sigma2/100.0; Serial.println(beta_x_sigma2,6); //计算100个倾角angle_y和100个角速度beta_x协方差 for(int i=0;i<100;i++) CovAngleyBetax+=(angle_ys[i]-angle_y_ave)*(beta_xs[i]-beta_x_ave); CovAngleyBetax=CovAngleyBetax/100.0; Serial.println(CovAngleyBetax,6); delay(10000); }可以在下方看到,打印出来了这些数值,方差比协方差大几十倍,至少都差了一个数量级。
非常小可以忽略,这也印证了非相关量的协方差为零的数学性质。
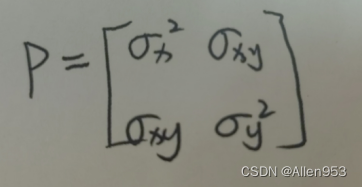
R矩阵
我们的R矩阵就是噪声协方差矩阵,只需要把测得的这些数值填进去就可以了。
Q矩阵
既然R矩阵已经有了,现在我们把Q矩阵也求出来。
引例及思路
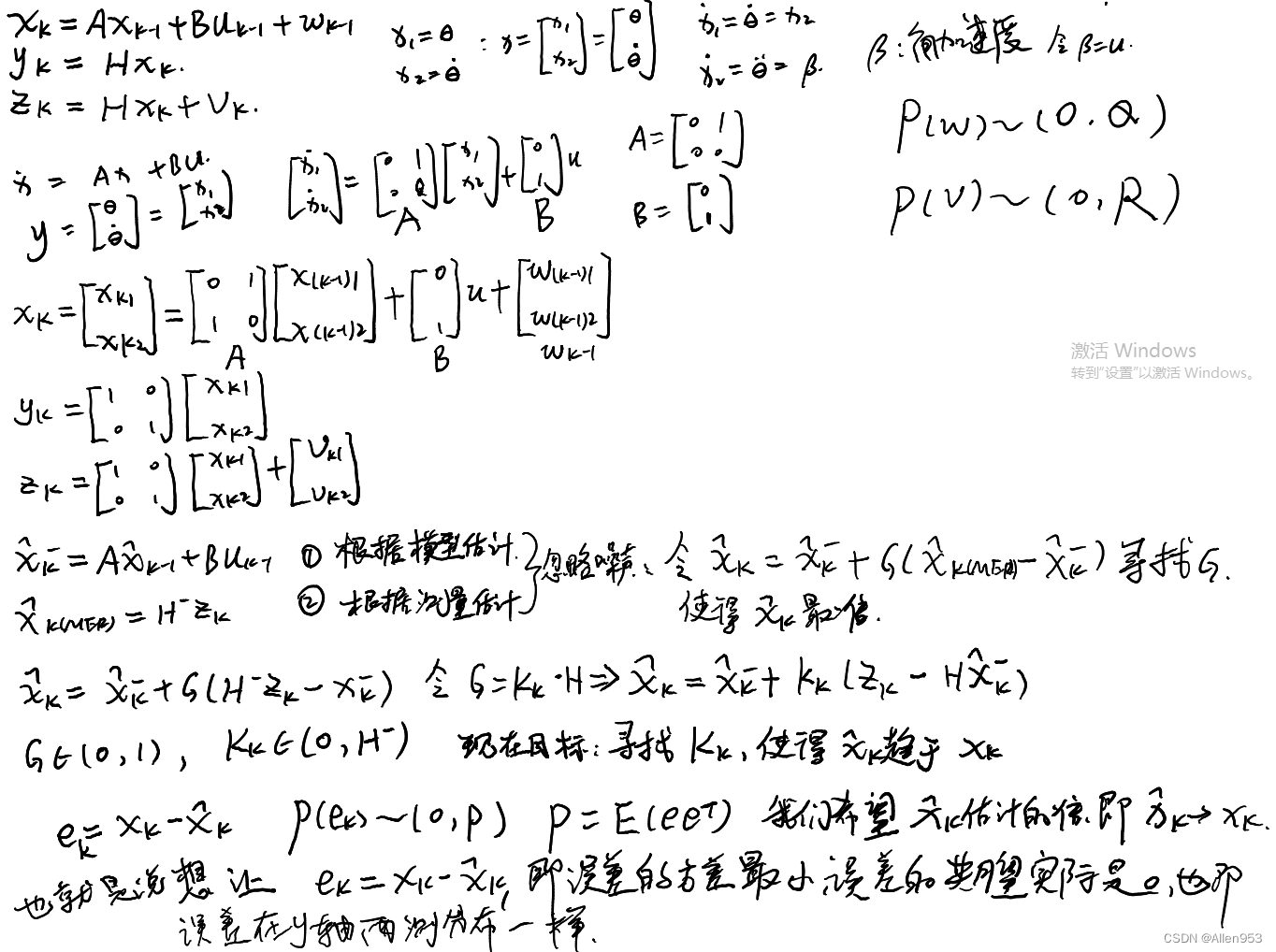
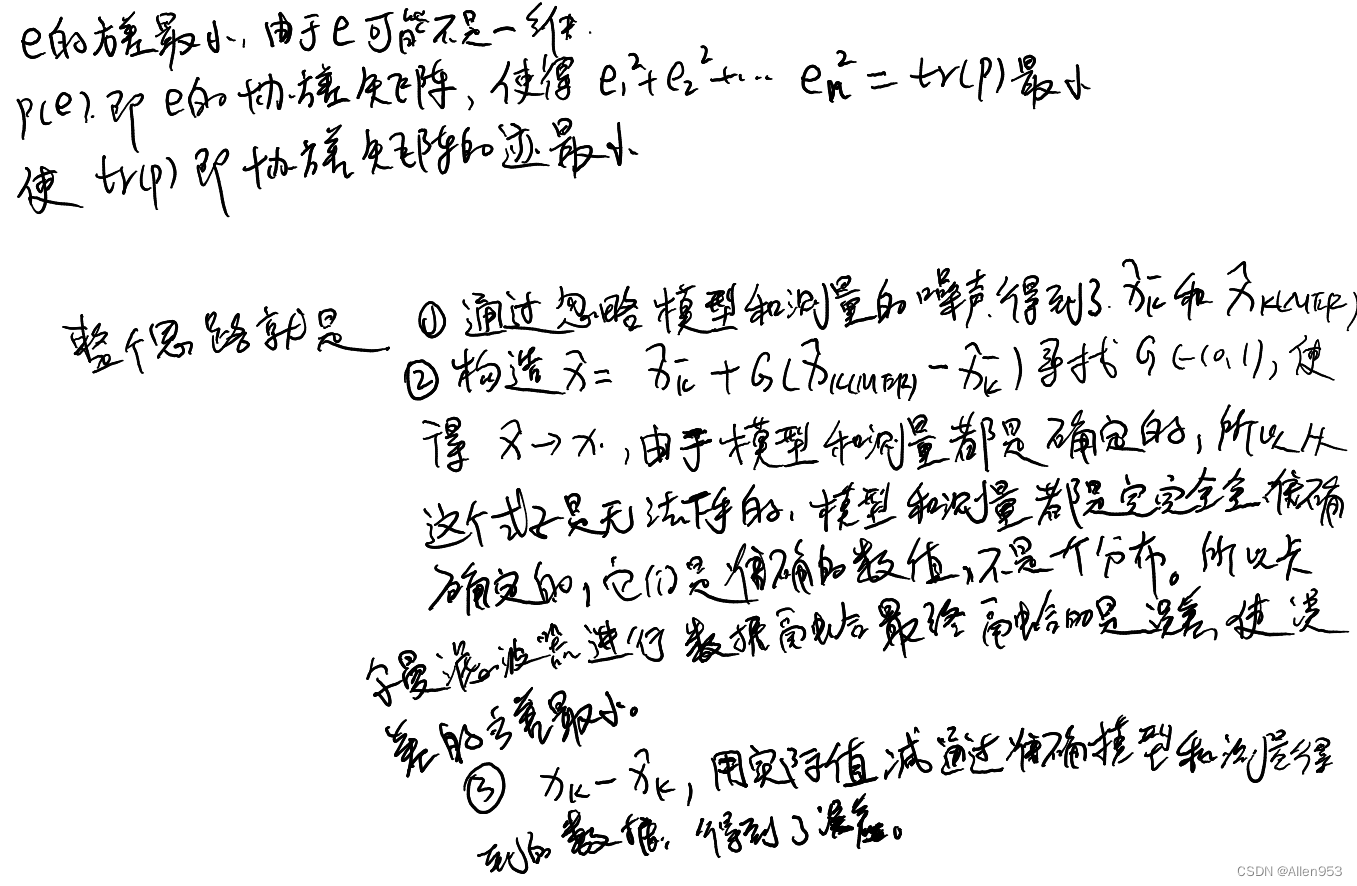
推导卡尔曼增益K
计算Pk的先验矩阵
卡尔曼滤波试验与数据分析
硬件使用Baize_Servo1
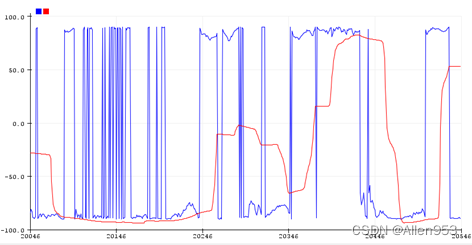
讯享网#include "Wire.h" #include "I2Cdev.h" #include "MPU6050.h" MPU6050 accelgyro; unsigned long now, lastTime = 0; float dt; //微分时间 int16_t ax, ay, az, gx, gy, gz; //加速度计陀螺仪原始数据 float aax=0, aay=0,aaz=0, agx=0, agy=0, agz=0; //角度变量 long axo = 0, ayo = 0, azo = 0; //加速度计偏移量 long gxo = 0, gyo = 0, gzo = 0; //陀螺仪偏移量 float pi = 3.; float AcceRatio = 16384.0; //加速度计比例系数 float GyroRatio = 131.0; //陀螺仪比例系数 uint8_t n_sample = 8; //加速度计滤波算法采样个数 float aaxs[8] = {0}, aays[8] = {0}, aazs[8] = {0}; //x,y轴采样队列 long aax_sum, aay_sum,aaz_sum; //x,y轴采样和 float a_x[10]={0}, a_y[10]={0},a_z[10]={0} ,g_x[10]={0} ,g_y[10]={0},g_z[10]={0}; //加速度计协方差计算队列 float Px=1, Rx, Kx, Sx, Vx, Qx; //x轴卡尔曼变量 float Py=1, Ry, Ky, Sy, Vy, Qy; //y轴卡尔曼变量 float Pz=1, Rz, Kz, Sz, Vz, Qz; //z轴卡尔曼变量 void setup() { Wire.begin(); Serial.begin(); accelgyro.initialize(); //初始化 unsigned short times = 200; //采样次数 for(int i=0;i<times;i++) { accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //读取六轴原始数值 axo += ax; ayo += ay; azo += az; //采样和 gxo += gx; gyo += gy; gzo += gz; } axo /= times; ayo /= times; azo /= times; //计算加速度计偏移 gxo /= times; gyo /= times; gzo /= times; //计算陀螺仪偏移 } void loop() { unsigned long now = millis(); //当前时间(ms) dt = (now - lastTime) / 1000.0; //微分时间(s) lastTime = now; //上一次采样时间(ms) accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //读取六轴原始数值 float accx = ax / AcceRatio; //x轴加速度 float accy = ay / AcceRatio; //y轴加速度 float accz = az / AcceRatio; //z轴加速度 aax = atan(accy / accz) * (-180) / pi; //y轴对于z轴的夹角 aay = atan(accx / accz) * 180 / pi; //x轴对于z轴的夹角 aaz = atan(accz / accy) * 180 / pi; //z轴对于y轴的夹角 Serial.print(aax);Serial.print(","); Serial.print(aay);Serial.print(","); Serial.print(aaz);Serial.print(","); aax_sum = 0; // 对于加速度计原始数据的滑动加权滤波算法 aay_sum = 0; aaz_sum = 0; for(int i=1;i<n_sample;i++) { aaxs[i-1] = aaxs[i]; aax_sum += aaxs[i] * i; aays[i-1] = aays[i]; aay_sum += aays[i] * i; aazs[i-1] = aazs[i]; aaz_sum += aazs[i] * i; } aaxs[n_sample-1] = aax; aax_sum += aax * n_sample; aax = (aax_sum / (11*n_sample/2.0)) * 9 / 7.0; //角度调幅至0-90° aays[n_sample-1] = aay; //此处应用实验法取得合适的系数 aay_sum += aay * n_sample; //本例系数为9/7 aay = (aay_sum / (11*n_sample/2.0)) * 9 / 7.0; aazs[n_sample-1] = aaz; aaz_sum += aaz * n_sample; aaz = (aaz_sum / (11*n_sample/2.0)) * 9 / 7.0; float gyrox = - (gx-gxo) / GyroRatio * dt; //x轴角速度 float gyroy = - (gy-gyo) / GyroRatio * dt; //y轴角速度 float gyroz = - (gz-gzo) / GyroRatio * dt; //z轴角速度 agx += gyrox; //x轴角速度积分 agy += gyroy; //x轴角速度积分 agz += gyroz; /* kalman start */ Sx = 0; Rx = 0; Sy = 0; Ry = 0; Sz = 0; Rz = 0; for(int i=1;i<10;i++) { //测量值平均值运算 a_x[i-1] = a_x[i]; //即加速度平均值 Sx += a_x[i]; a_y[i-1] = a_y[i]; Sy += a_y[i]; a_z[i-1] = a_z[i]; Sz += a_z[i]; } a_x[9] = aax; Sx += aax; Sx /= 10; //x轴加速度平均值 a_y[9] = aay; Sy += aay; Sy /= 10; //y轴加速度平均值 a_z[9] = aaz; Sz += aaz; Sz /= 10; for(int i=0;i<10;i++) { Rx += sq(a_x[i] - Sx); Ry += sq(a_y[i] - Sy); Rz += sq(a_z[i] - Sz); } Rx = Rx / 9; //得到方差 Ry = Ry / 9; Rz = Rz / 9; Px = Px + 0.0025; // 0.0025在下面有说明... Kx = Px / (Px + Rx); //计算卡尔曼增益 agx = agx + Kx * (aax - agx); //陀螺仪角度与加速度计速度叠加 Px = (1 - Kx) * Px; //更新p值 Py = Py + 0.0025; Ky = Py / (Py + Ry); agy = agy + Ky * (aay - agy); Py = (1 - Ky) * Py; Pz = Pz + 0.0025; Kz = Pz / (Pz + Rz); agz = agz + Kz * (aaz - agz); Pz = (1 - Kz) * Pz; /* kalman end */ Serial.print(agx);Serial.print(","); Serial.print(agy);Serial.print(","); Serial.println(agz);//Serial.println(); }
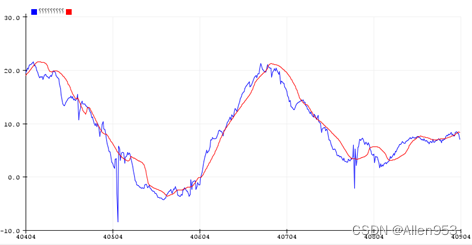
俯仰角 横滚角

偏航角 三轴欧拉角
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/52296.html