
目录
0.前言
0.1 自动控制理论发展
0.2 自动控制系统的基本结构及工作原理
0.3 自动控制系统的分类
0.4 自动控制系统的基本要求
1. 数学模型
1,1描述系统运动的数学模型
1.2 建立系统数学模型的方法
1.3 用解析法建立系统微分方程的一般步骤
2. 传递函数
2.1 传递函数的定义
2.2 传递函数的性质
2.3方框图
2.4 系统信号流图和梅逊公式
3. 带扰动的反馈控制系统
3.1 系统的开环传递函数
3.2 系统的闭环传递函数
4. 闭环系统的误差传递函数
5. 总结
0.前言
0.1 自动控制理论发展
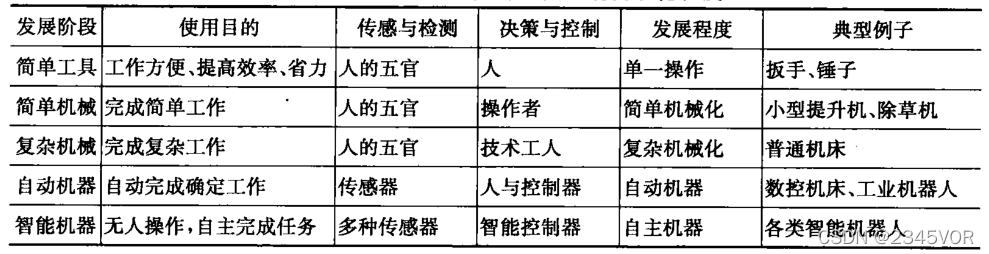
人类最初使用的机械是杠杆,通过杠杆,人可以移动直接用手不能移动的重物;发明利用自然力(如风车和水车的使用)是人用机械动力把自己从繁重的体力劳动中解脱出来的开始,机械开始不断地由简单变复杂;蒸汽机和电动机的发明,为机械提供了有效并且使用方便的动力,同时也提出了机械自动化问题。
0.2 自动控制系统的基本结构及工作原理
所谓自动控制,是指在没人直接参与的情况下,利用外加设备或装置使被控对象或过程按照预定的规律运行。能够实现自动控制任务的系统称为自动控制系统。简单的自动控制系统通过机械系统自身的机构实现检测调节功能,如水位控制系统、蒸汽机转速控制系统等。但随着科学技术的发展,机械系统越来越复杂,将机械与电子融合在一起逐渐产生了机电一体化系统。反馈控制系统是完整而典型的自动控制系统·。


- 被控对象:在控制系统中,其运动规律或状态需要控制的装置称为被控对象,如教材中位置控制系统中的工作台。
- 被控量:表征被控对象运动规律或状态的物理量,即输出量,如位置控制系统中工作台的位移。
- 执行元件:控制系统中直接对被控对象进行操作的元件,如位置控制系统中的伺服电动机、减速器、滚珠丝杠和直线导轨等。
- 控制器:接受偏差信号,通过转换和运算产生控制量的元件,如位置控制系统中的PI(Proportion-Integration,比例-积分>控制器。
- 控制量:为控制输出量按预定规律变换必须提供给系统的物理量,通常为电压或电流。放大元件:控制系统中对偏差信号进行幅值放大或功率放大的元件,如位置控制系统中的前置放大器。
- 比较元件:控制系统中用以比较输入信号与反馈信号,而输出偏差信号的元件,如位置控制系统中的比较器。
- 给定元件:控制系统中主要用于产生给定信号(输人信号)的元件,如位置控制系统中的给定电位器。
- 反馈元件:控制系统中用于测量输出量,产生反馈信号的元件,如位置控制系统中的反馈电位器。
- 偏差:系统输入量与反馈量之差,位置控制系统中比较环节的输出,如位置控制系统中给定电位器输入ua与检测电位器输出u,的差。
- 干扰:偶然的、无法加以人工控制的信号。
0.3 自动控制系统的分类
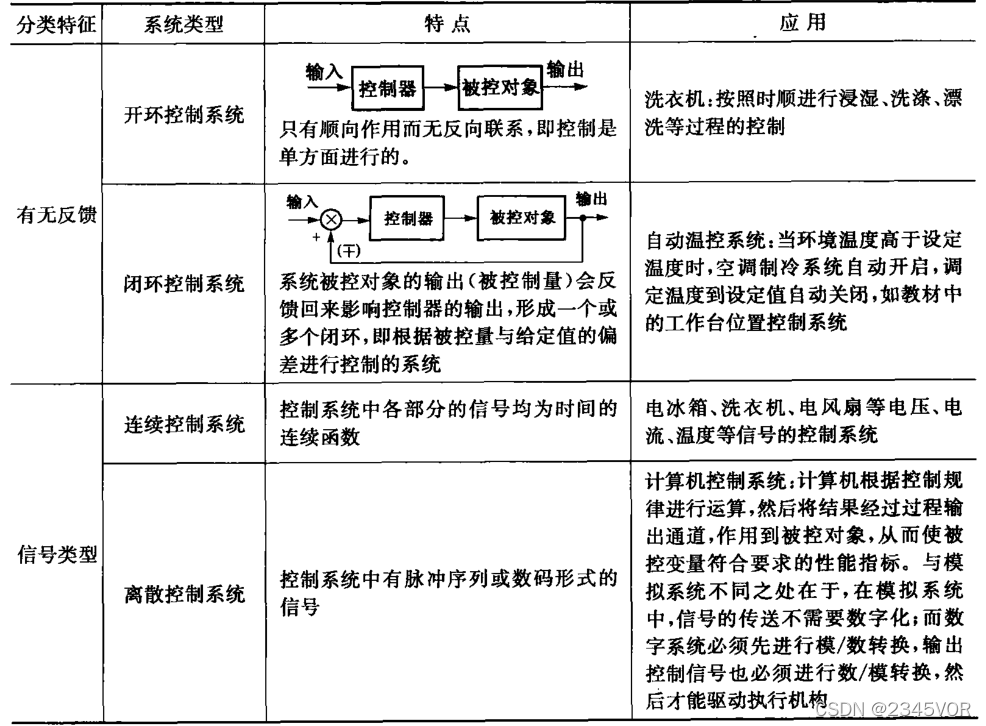
机械自动控制系统可按照控制系统有无反馈环节、控制系统中的信号类型、控制变量的多少、系统参数变化规律、系统本身的动态特性和系统采用的控制方法等进行

0.4 自动控制系统的基本要求
对控制系统的要求可简要概括为三个字:稳、快、准。
1)稳定性
稳定性是指系统在受到外部作用之后的动态过程的倾向和恢复平衡状态的能力。不稳定的系统是无法工作的。因此,控制系统的稳定性是控制系统分析和设计的首要内容。
2)快速性
系统在稳定的前提下,响应的快速性是指系统消除实际输出量与稳态输出量之间误差的快慢程度。反映系统敏捷性:动态过程要短且震荡要适中。
3)准确性
准确性是指在系统达到稳定状态后,系统实际输出量与给定的输出量之间的误差大小,它又称为稳态精度。系统的稳态精度不但与系统有关,而且与输入信号的类型有关。
1. 数学模型
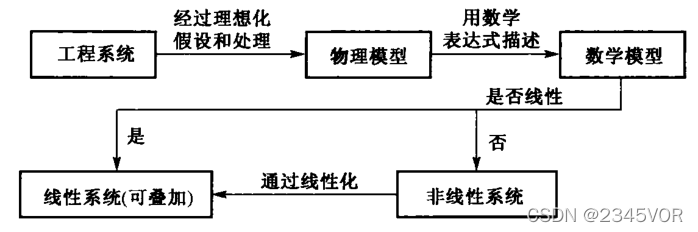
为了实现某种目的而把客观存在的物体按一定关系联系在一起的集合称为物理系统,而工程系统(包括机械系统、电系统、液压系统以及它们的综合系统,即机电一体化系统)是物理系统的-个分支。所示为系统数学模型的形成和分类。
系统的微分方程是在时域中描述系统(或元件)动态特性的数学模型。利用它还可得到描述系统(或元件)动态特性的其他形式的数学模型。
当系统的数学模型能用线性微分方程描述时,该系统称为线性系统。如果微分方程的系数为常数,则称该系统为线性定常系统。线性系统可以运用叠加原理,叠加原理包括叠加性及齐次性。当有几个输入量同时作用于系统时,可以逐个输入,求出对应的输出,然后把各个输出进行叠加,即得系统的总输出。研究非线性系统不能应用叠加原理。不能用线性微分方程描述为非线性系统。一般的非线性系统可以通过线性化转化为线性系统。
1,1描述系统运动的数学模型
Ø输入-输出描述
微分方程是这种描述的最基本形式。传递函数、方框图等其它模型均由它而导出
Ø状态变量描述
状态方程是这种描述的最基本形式。
1.2 建立系统数学模型的方法
Ø 实验法
Ø 解析法
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/51360.html