
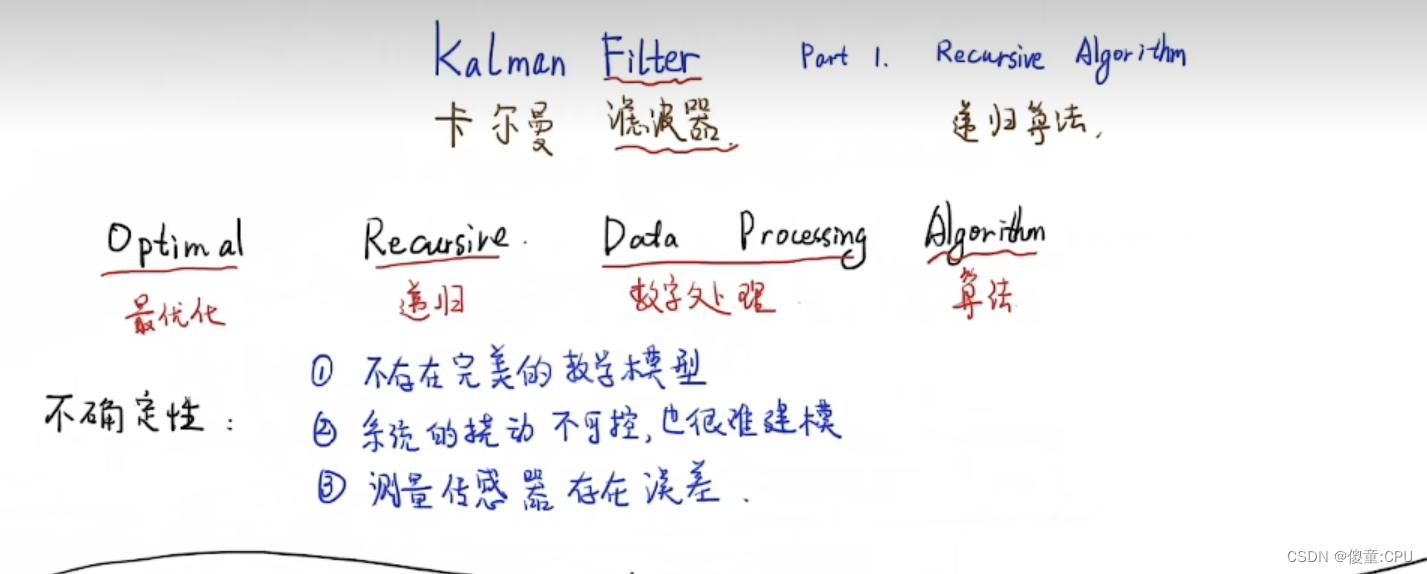
卡尔曼滤波器
卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
递归算法
递归算法(英语:recursion algorithm)在计算机科学中是指一种通过重复将问题分解为同类的子问题而解决问题的方法。递归式方法可以被用于解决很多的计算机科学问题,因此它是计算机科学中十分重要的一个概念。绝大多数编程语言支持函数的自调用,在这些语言中函数可以通过调用自身来进行递归。计算理论可以证明递归的作用可以完全取代循环,因此在很多函数编程语言(如Scheme)中习惯用递归来实现循环。
讯享网
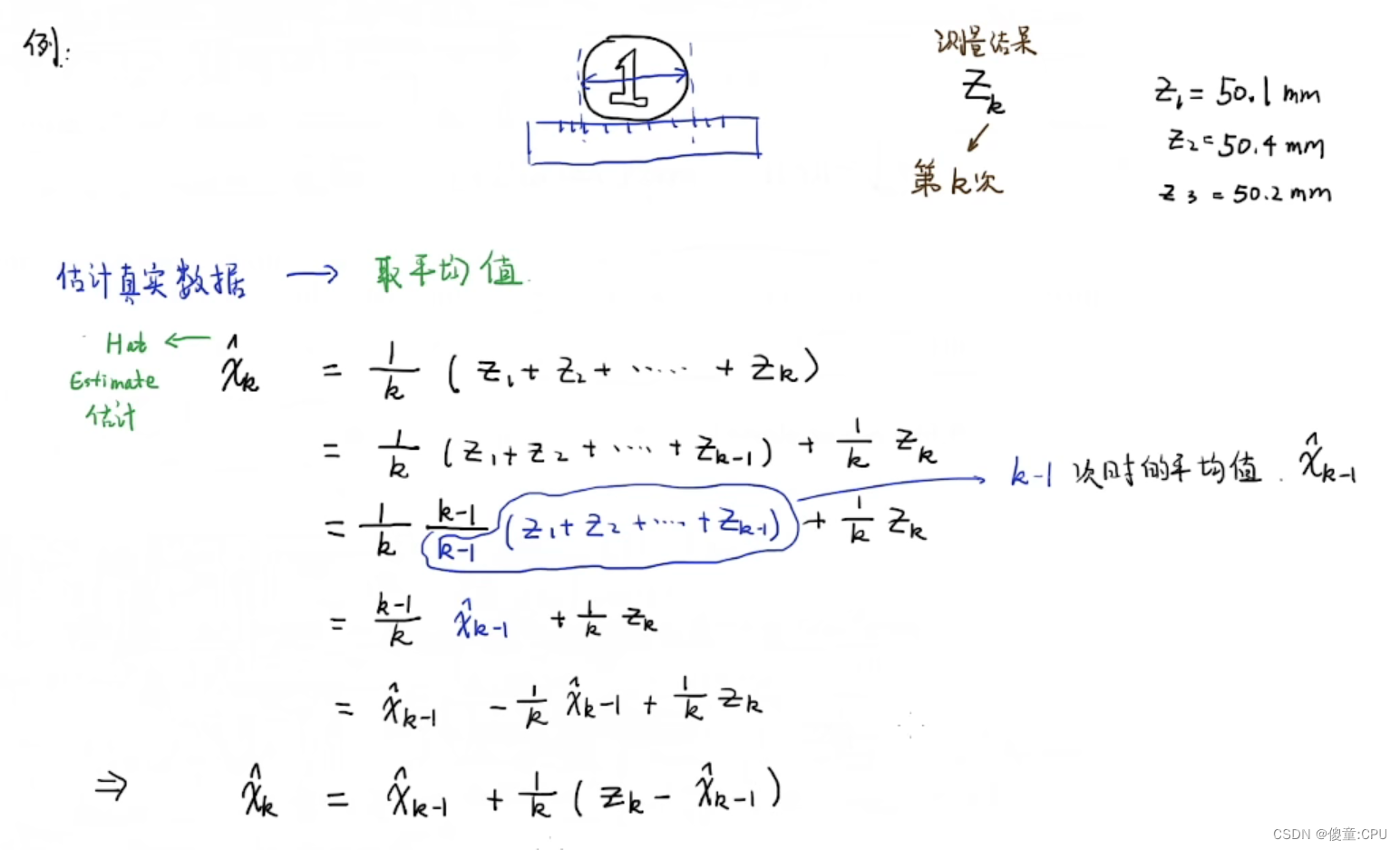
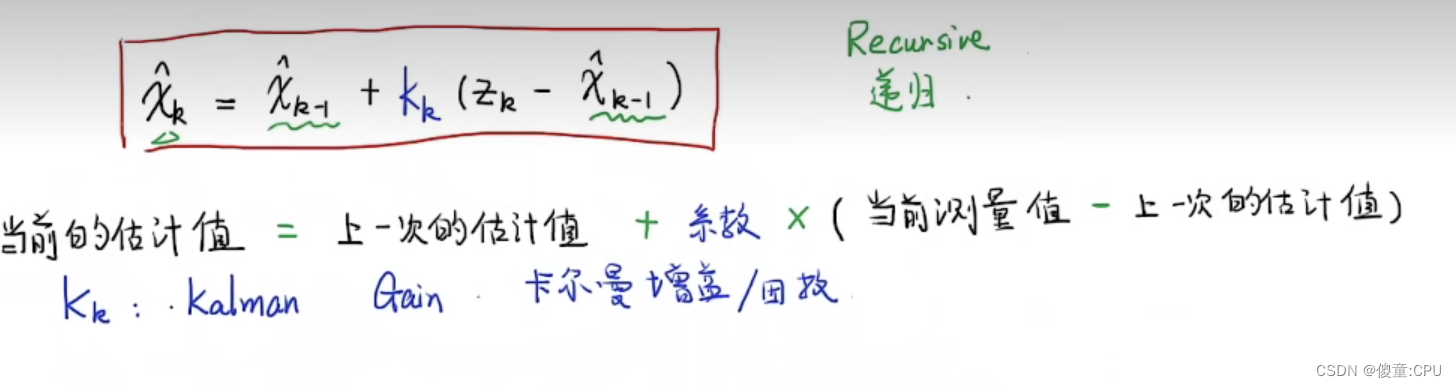
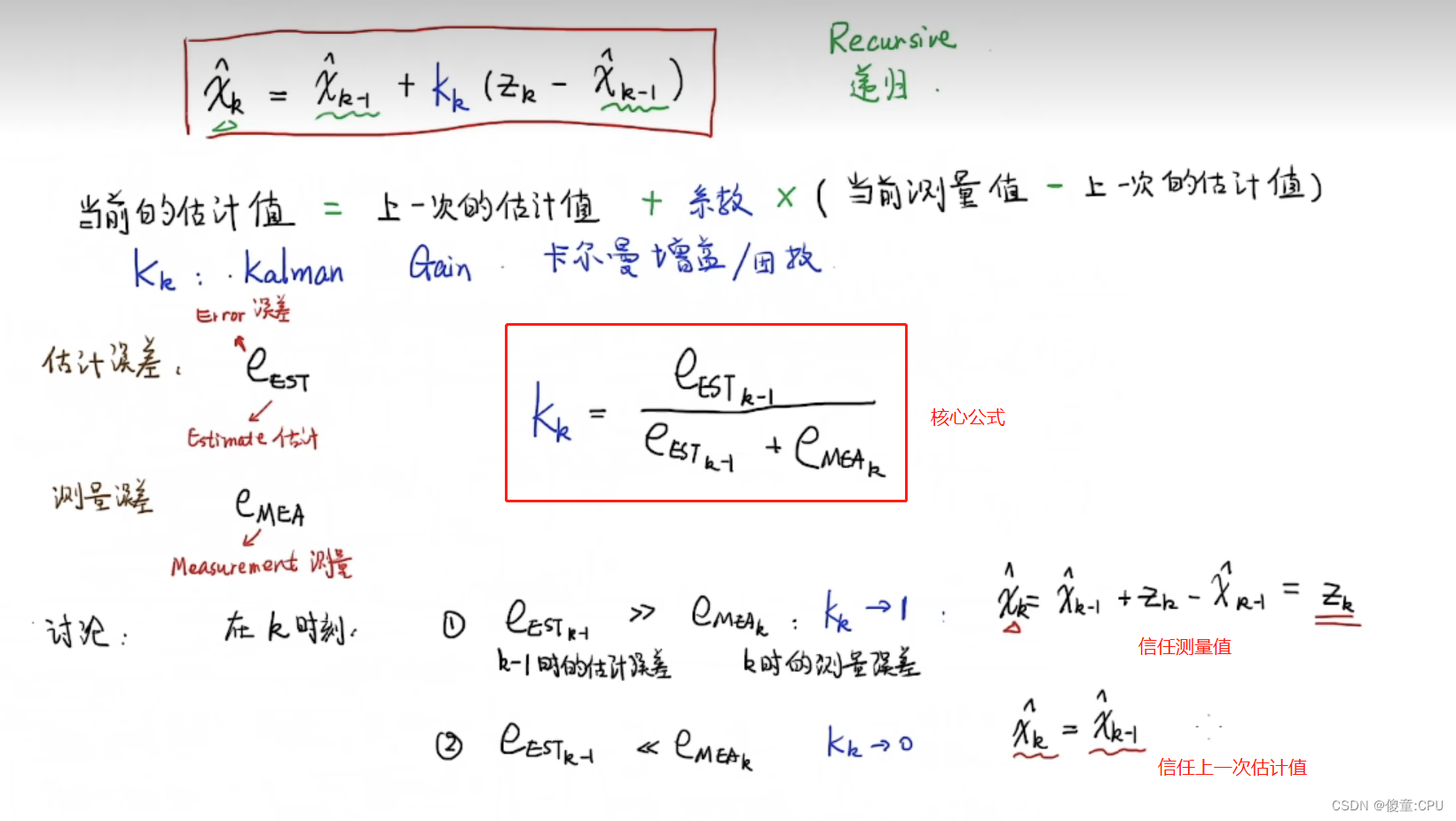
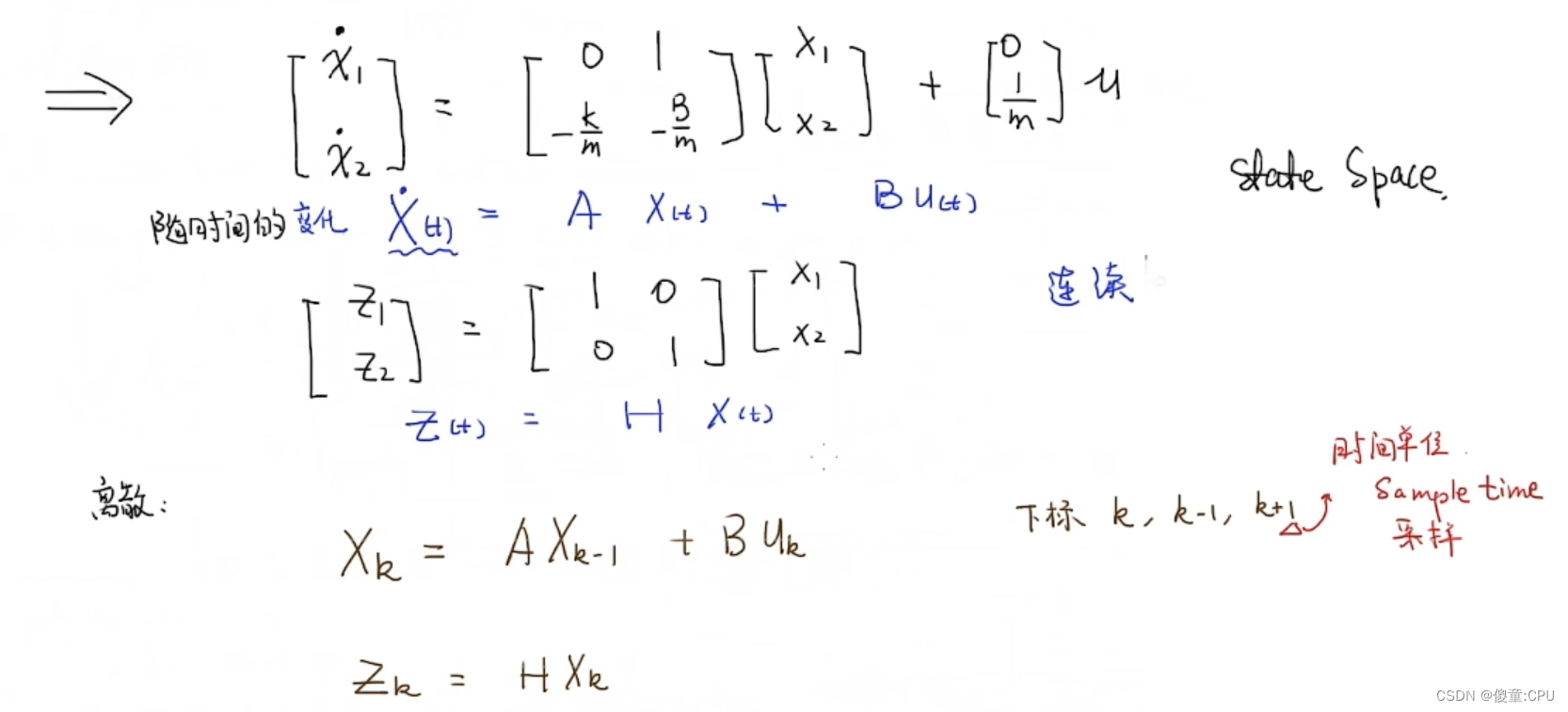
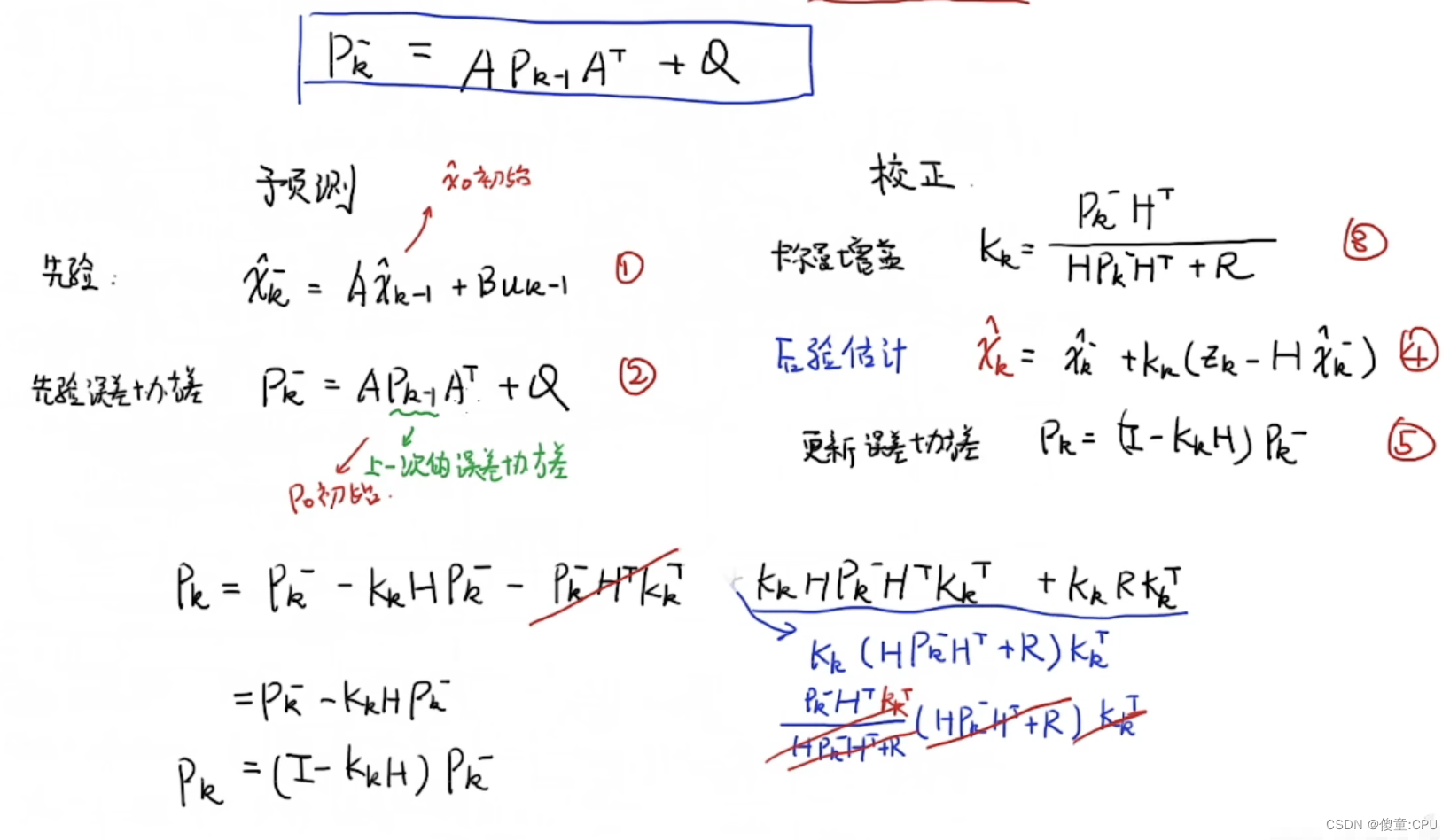
注意角标
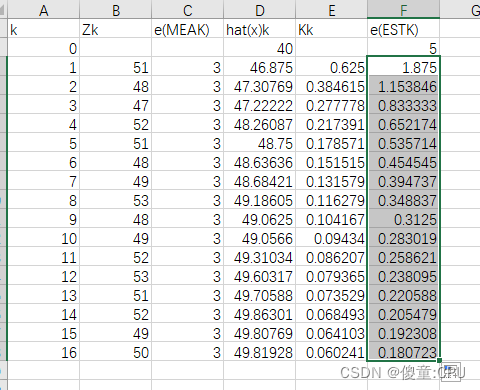
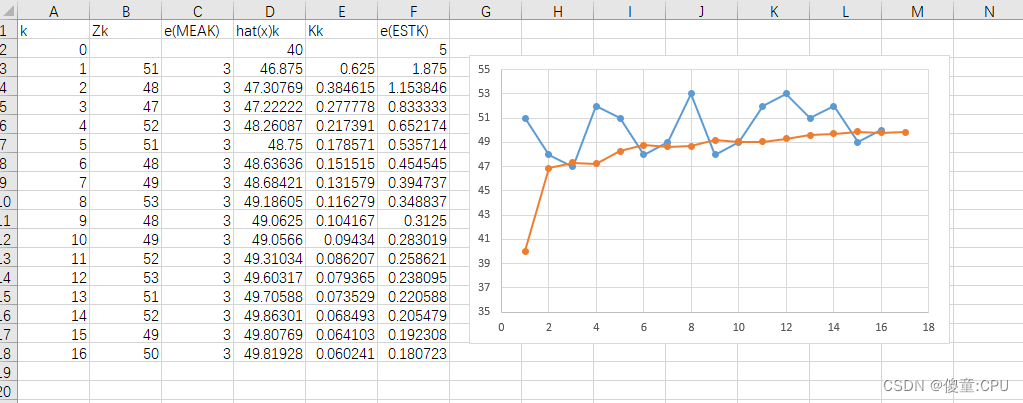
初始值
进行估计
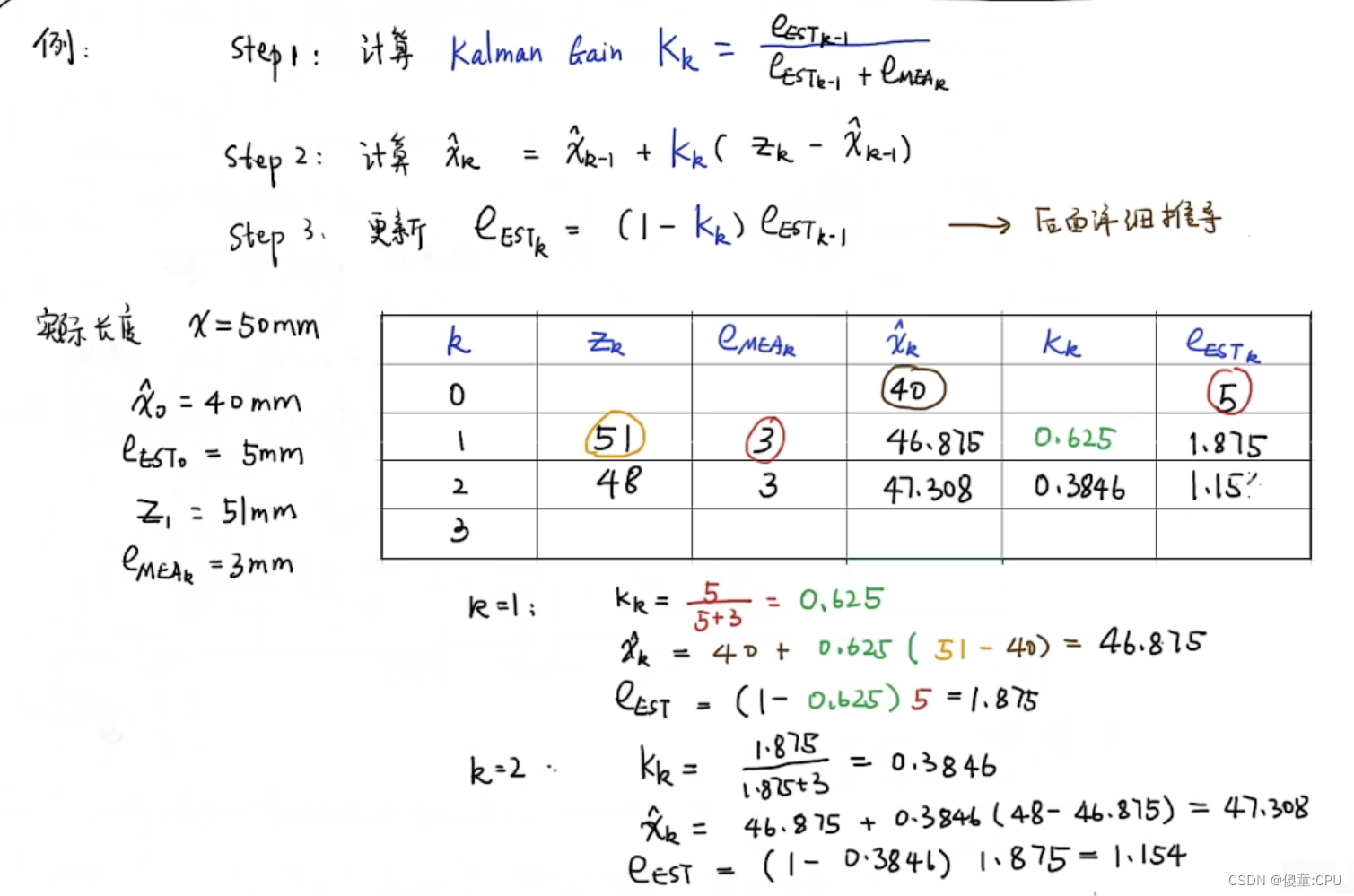
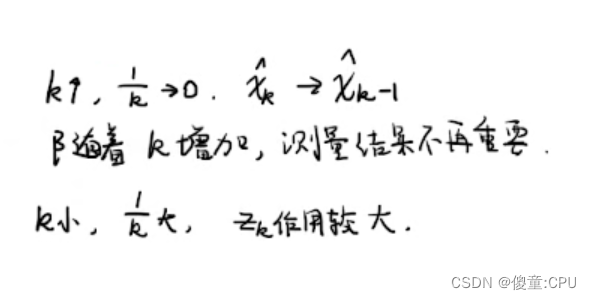
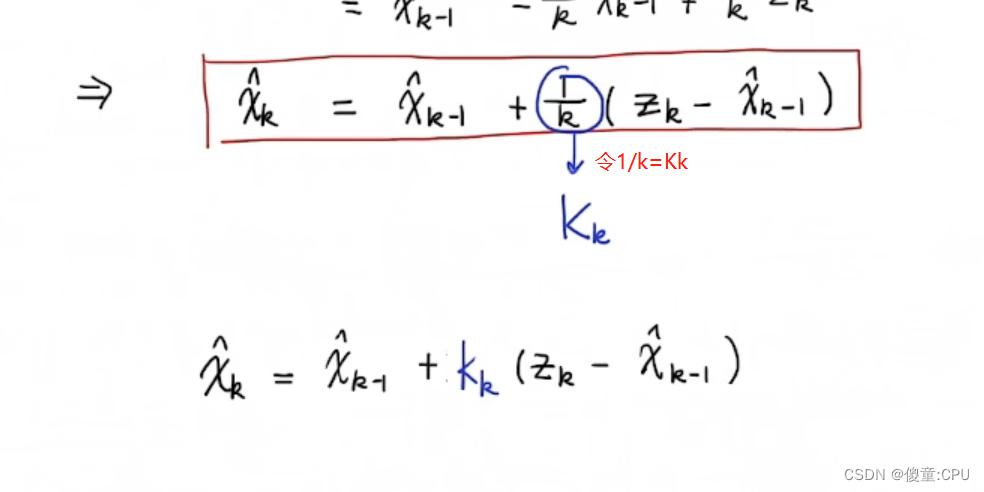
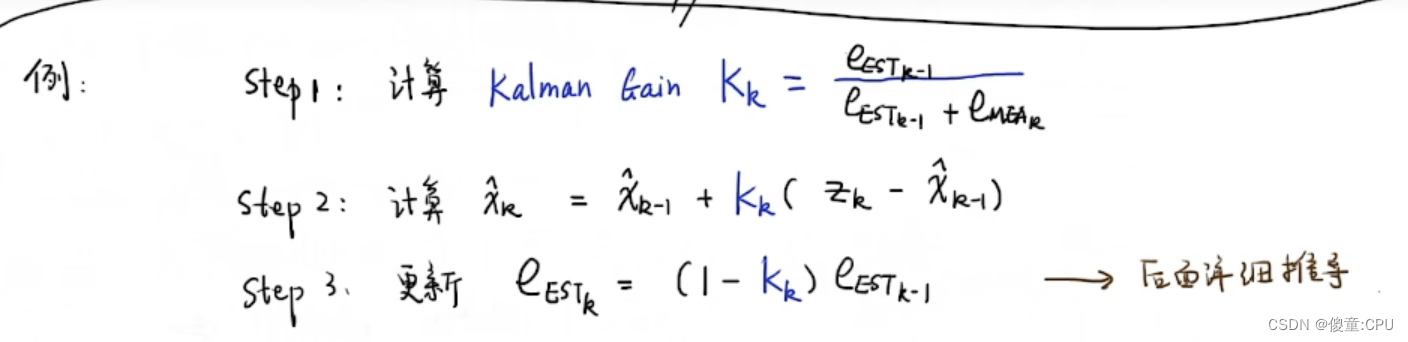
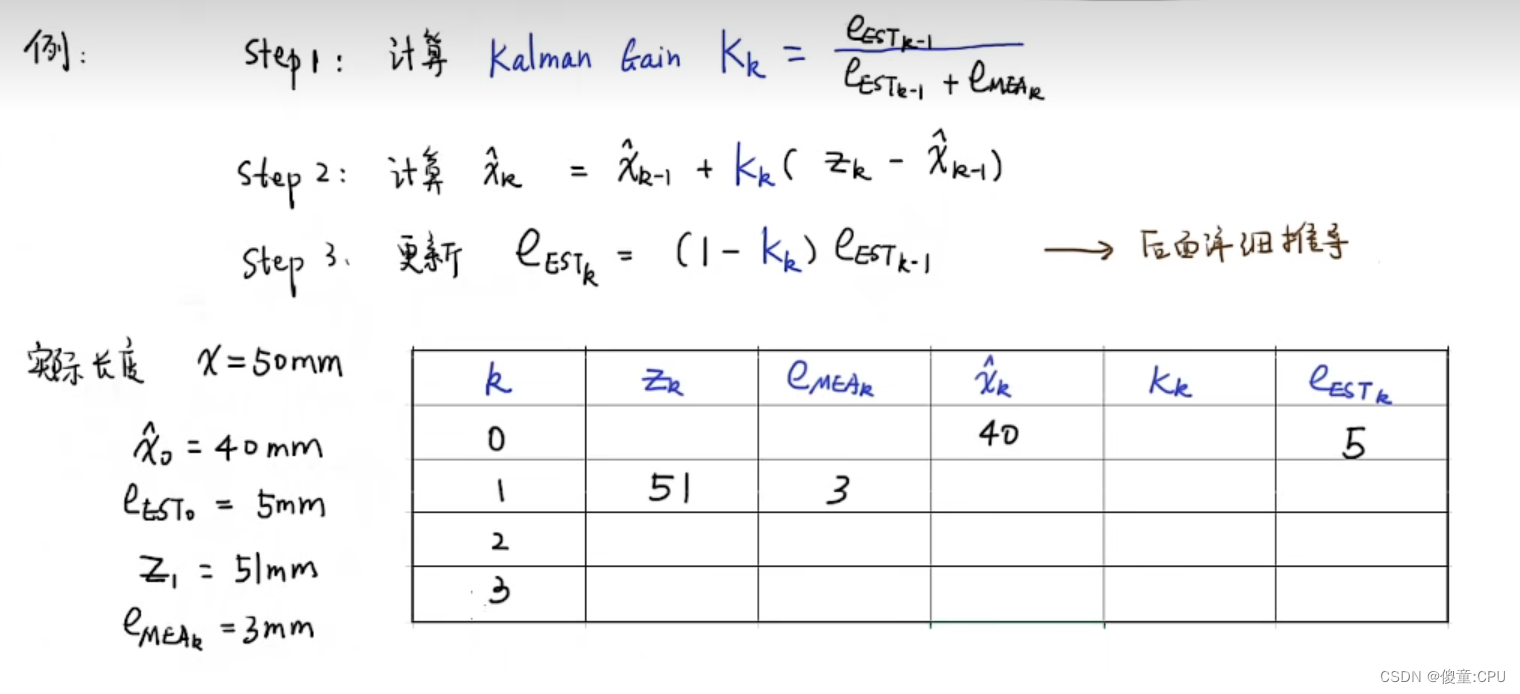
按照公式一步一步的计算。
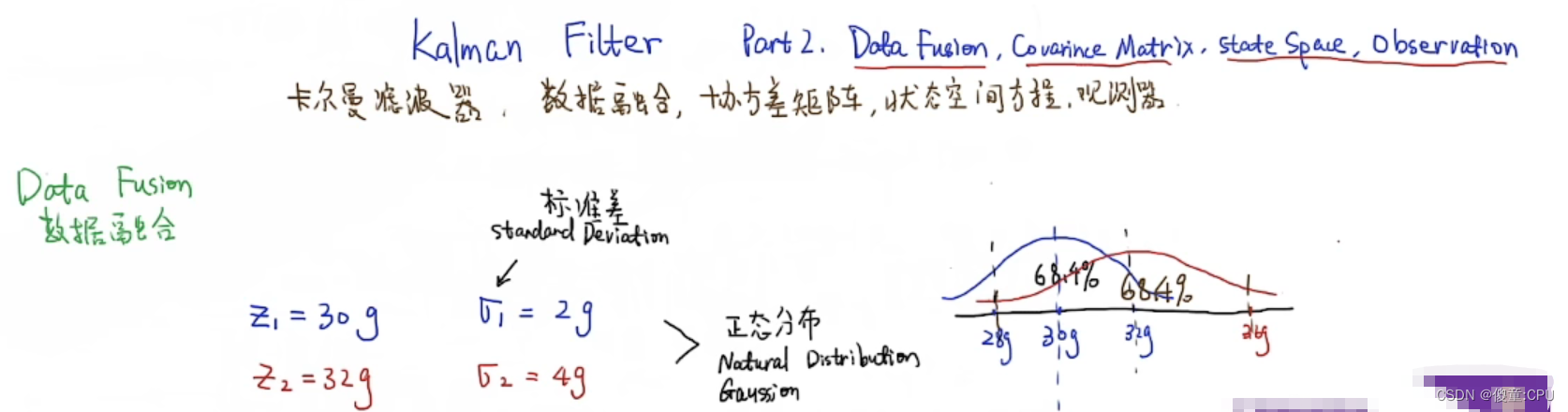
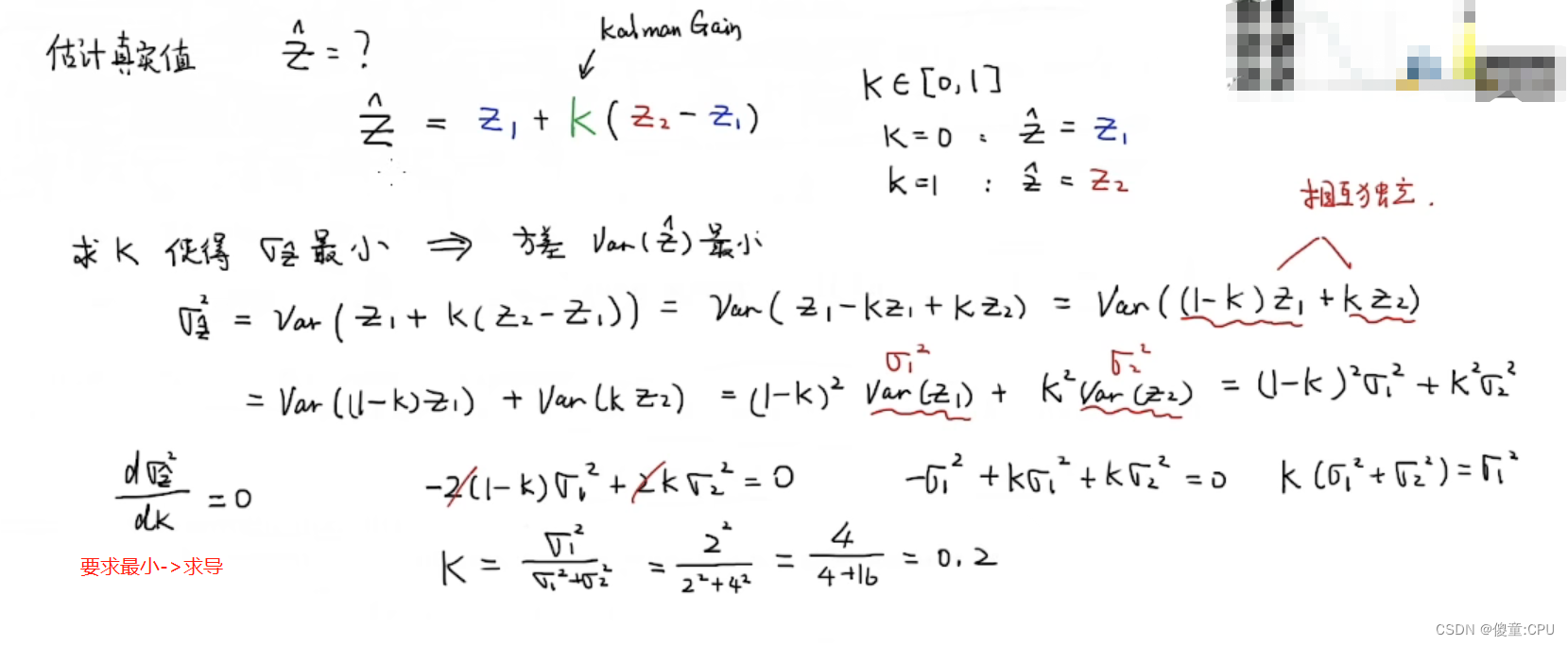
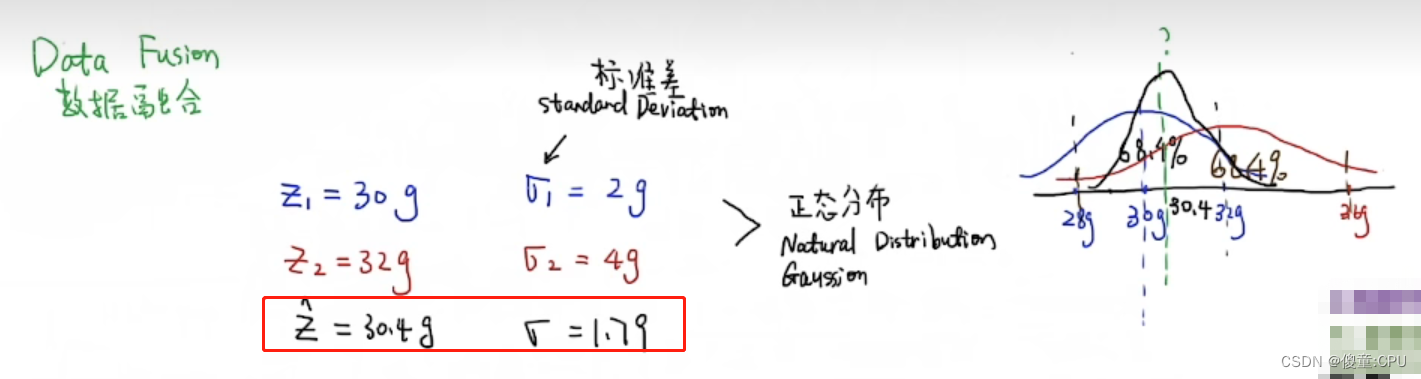
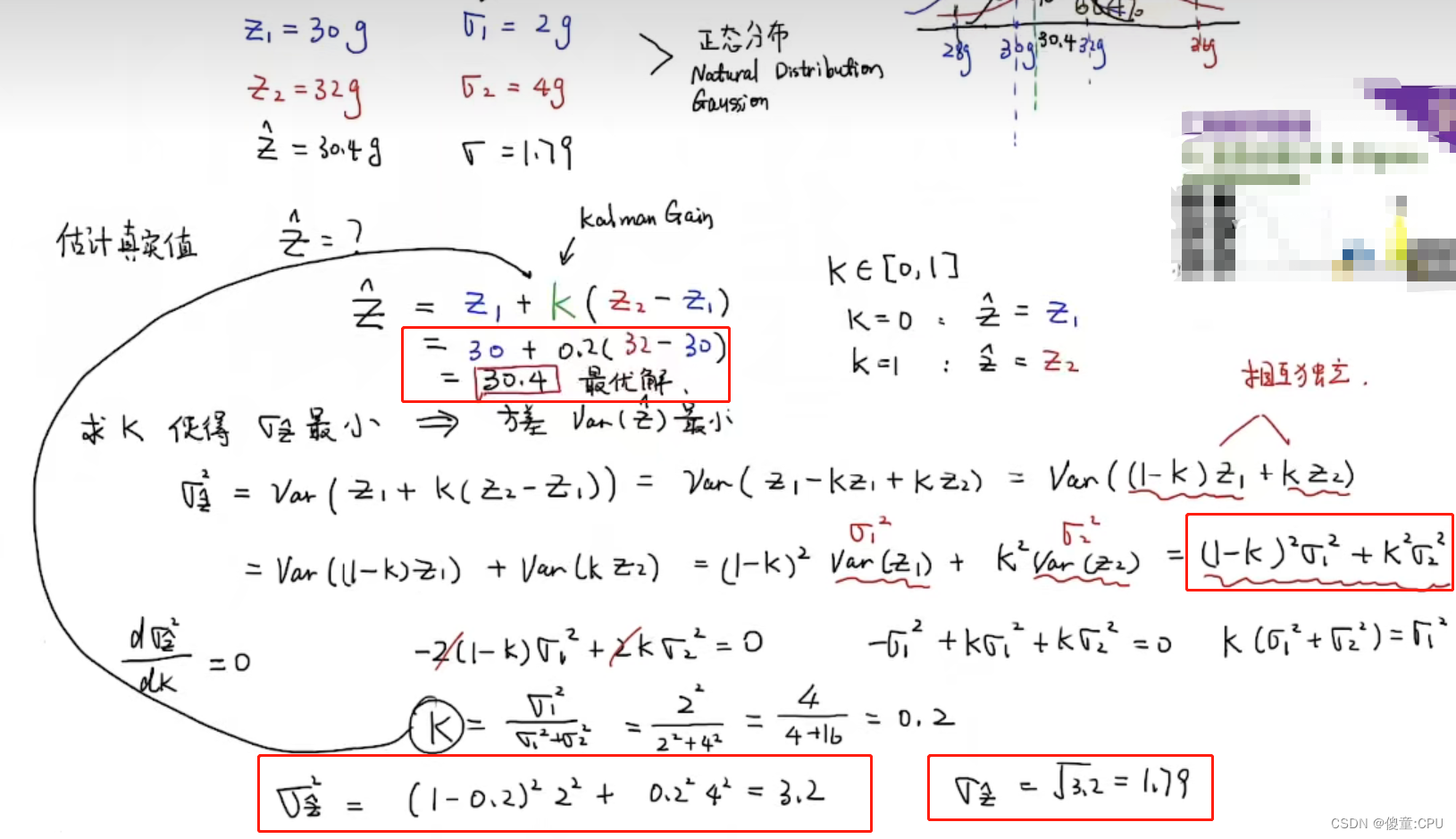
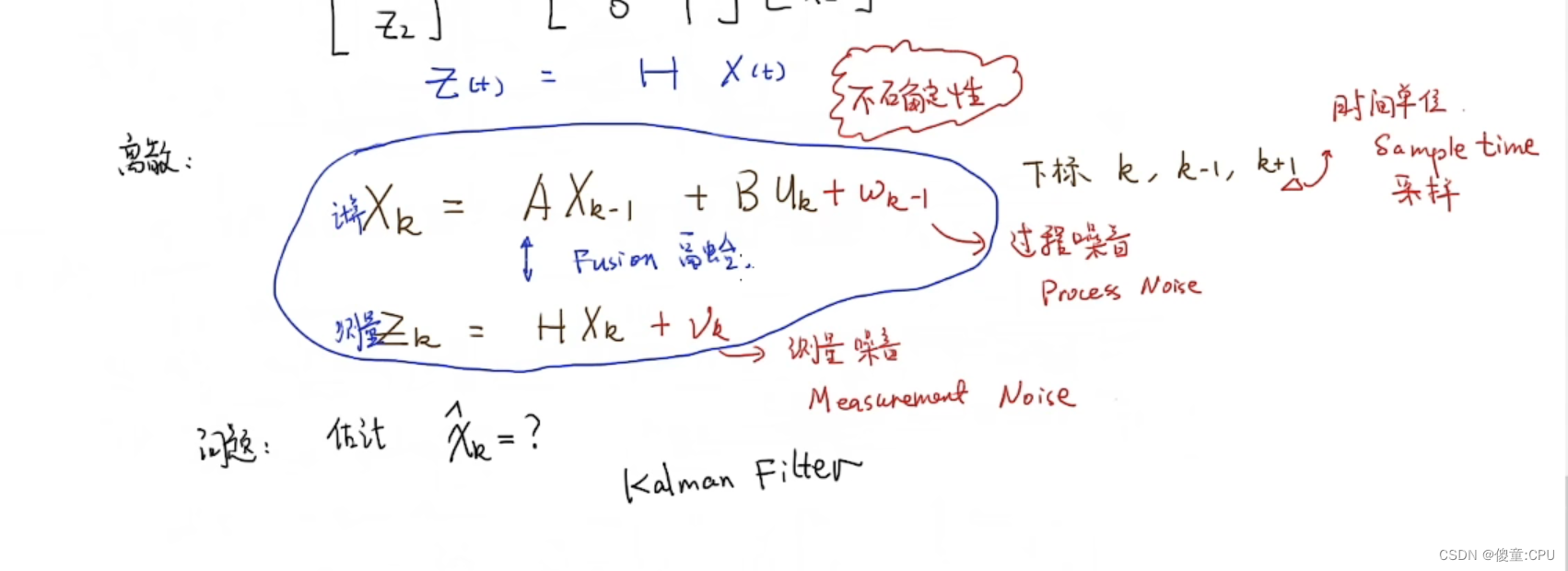
数据融合
数据融合是将多传感 器信息源的数据和信息加以联合、相关及组合,获得更为精确的位置估计及身份估计,从而实现对战场态势和威胁以及其重要程度实时、完整评价的处理过程。
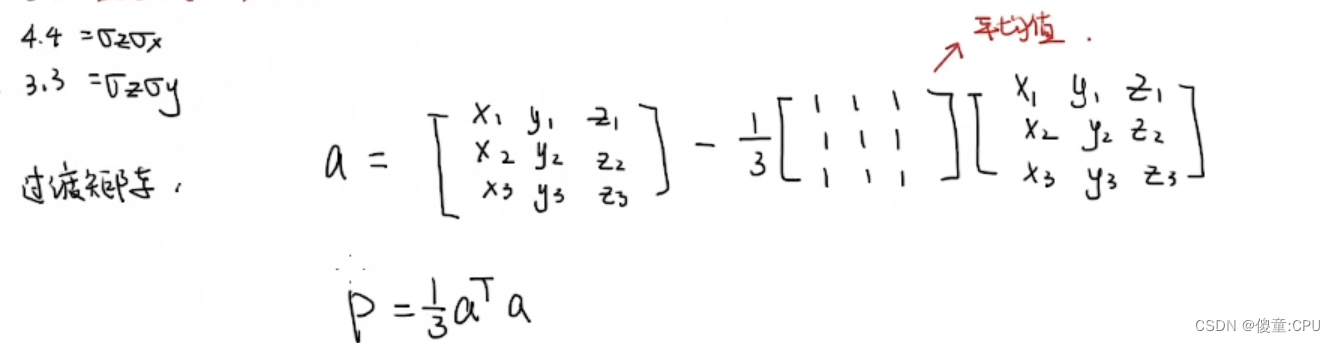
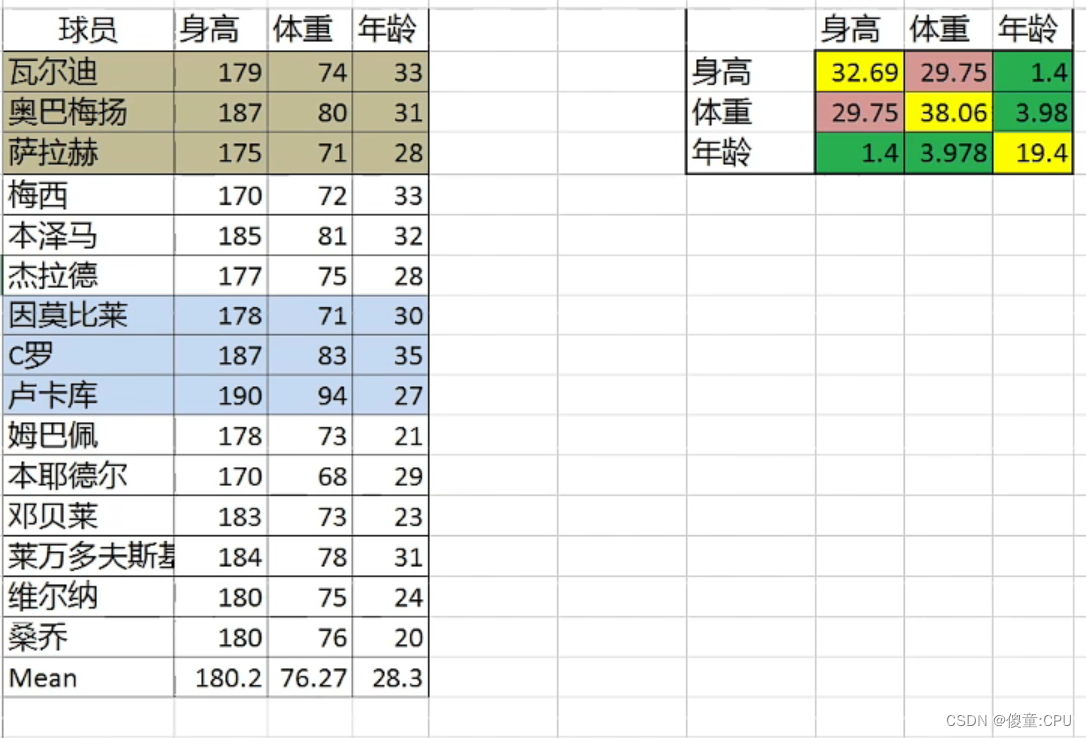
协方差矩阵
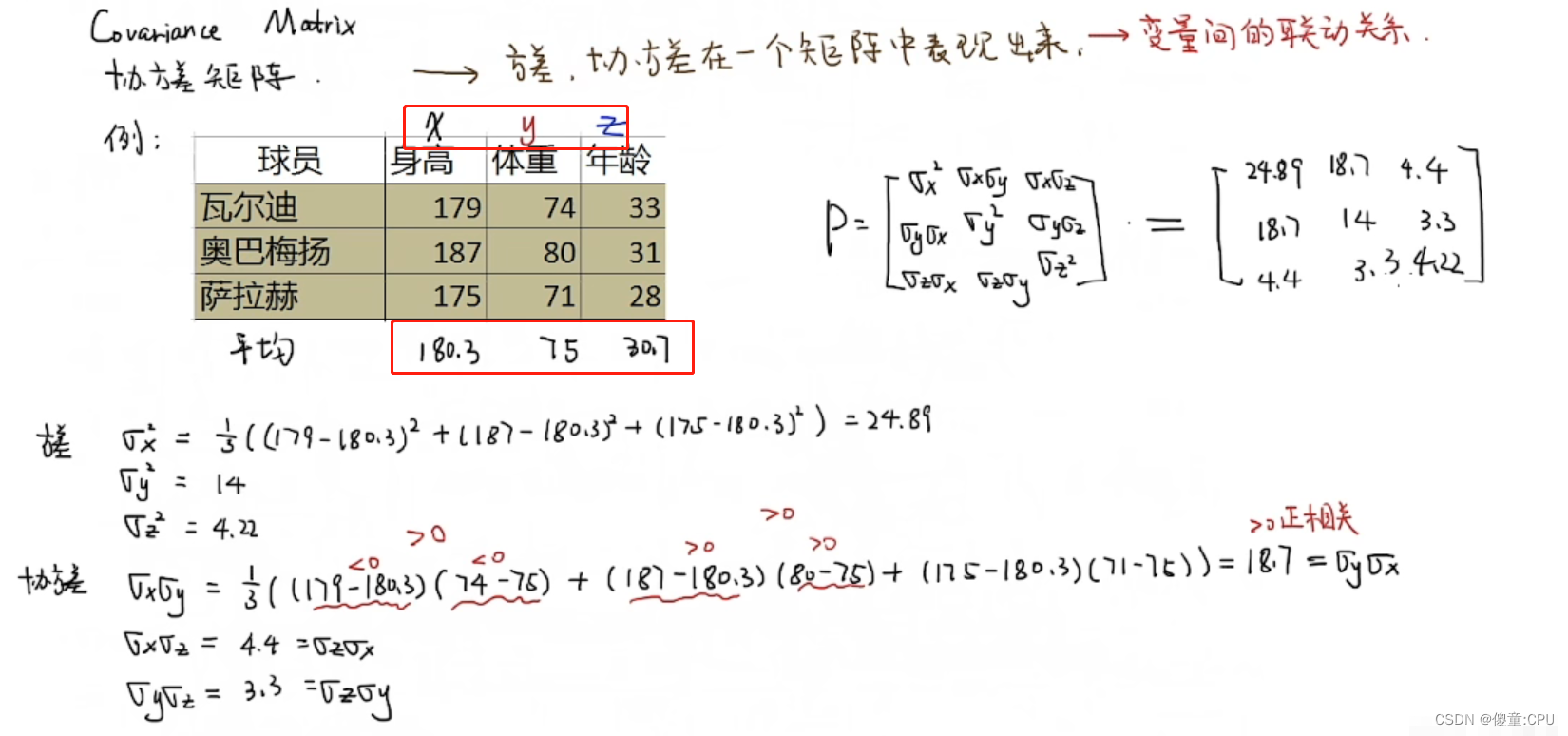
过渡矩阵是基与基之间的一个可逆线性变换,在一个空间V下可能存在不同的基。假设有2组基分别为A,B。由基A到基B的过渡矩阵P被定义为P=Mat_A(B)。对于这个矩阵,有关系B=AP。它表示的是基与基之间的关系。
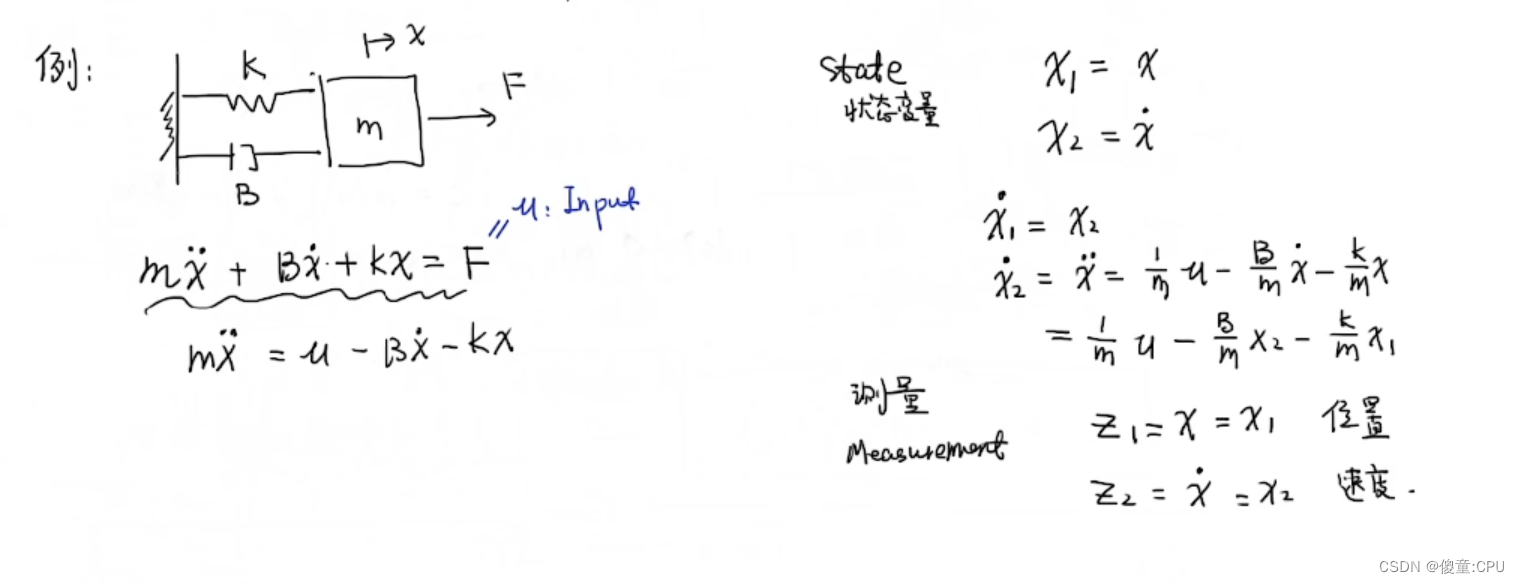
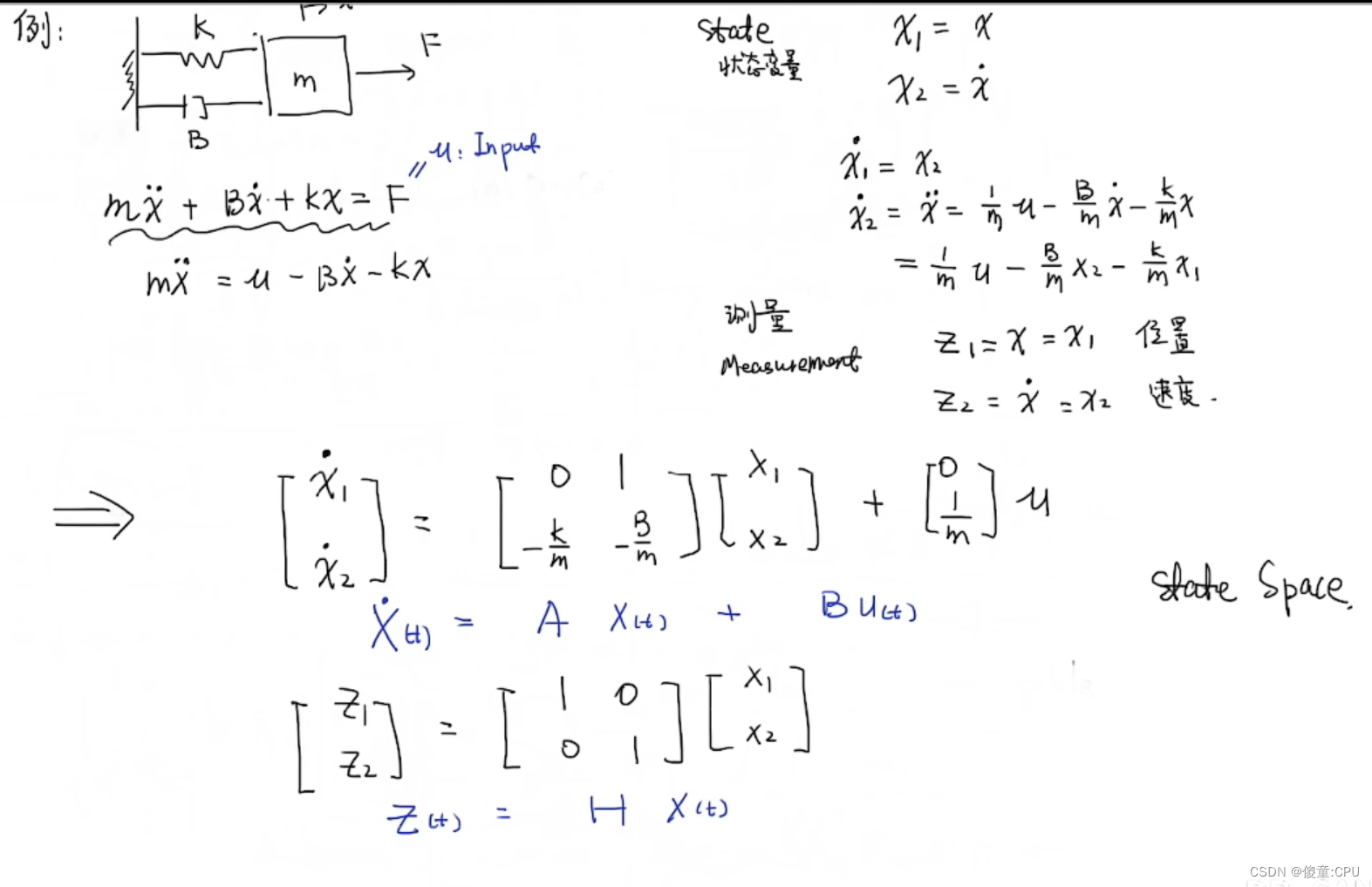
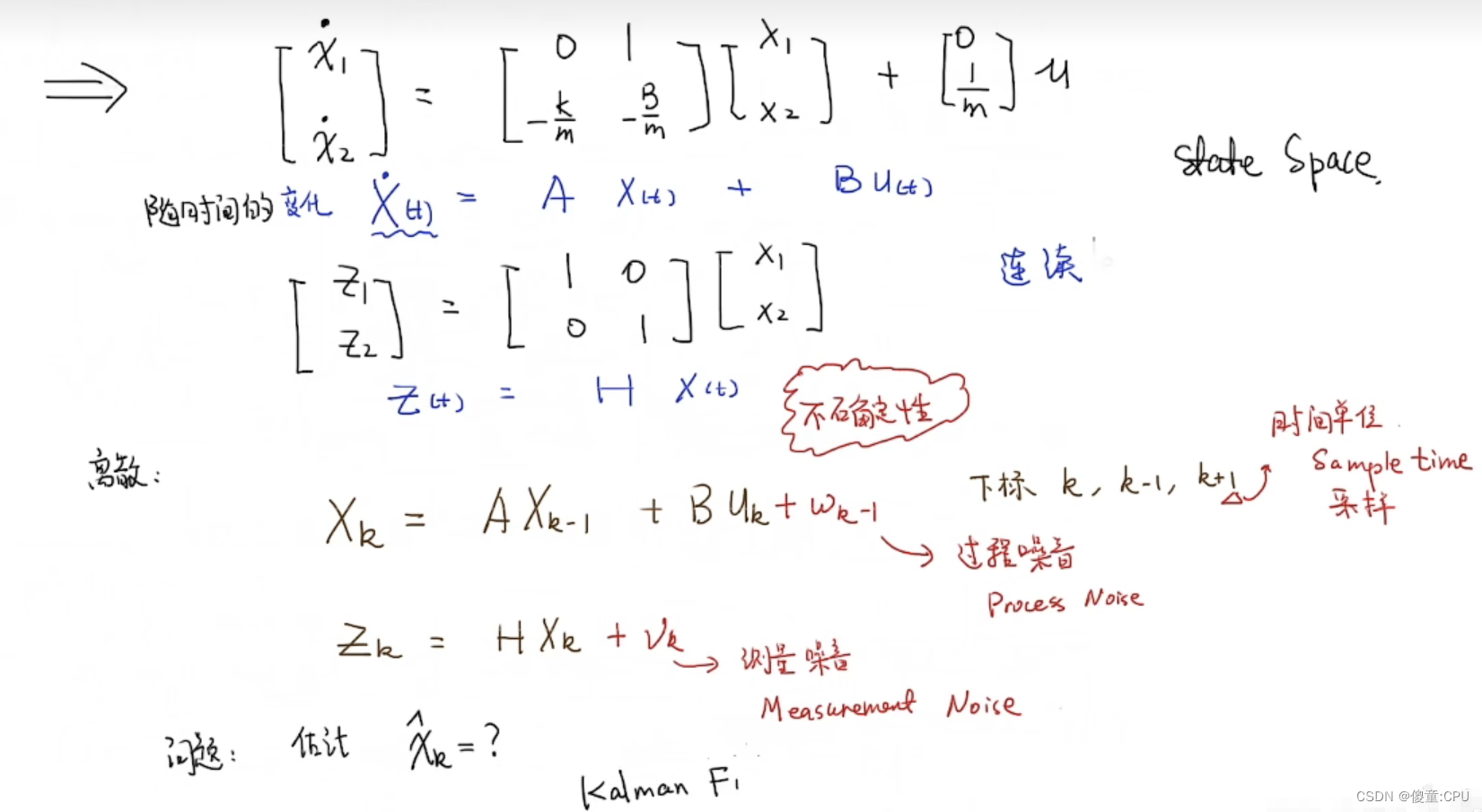
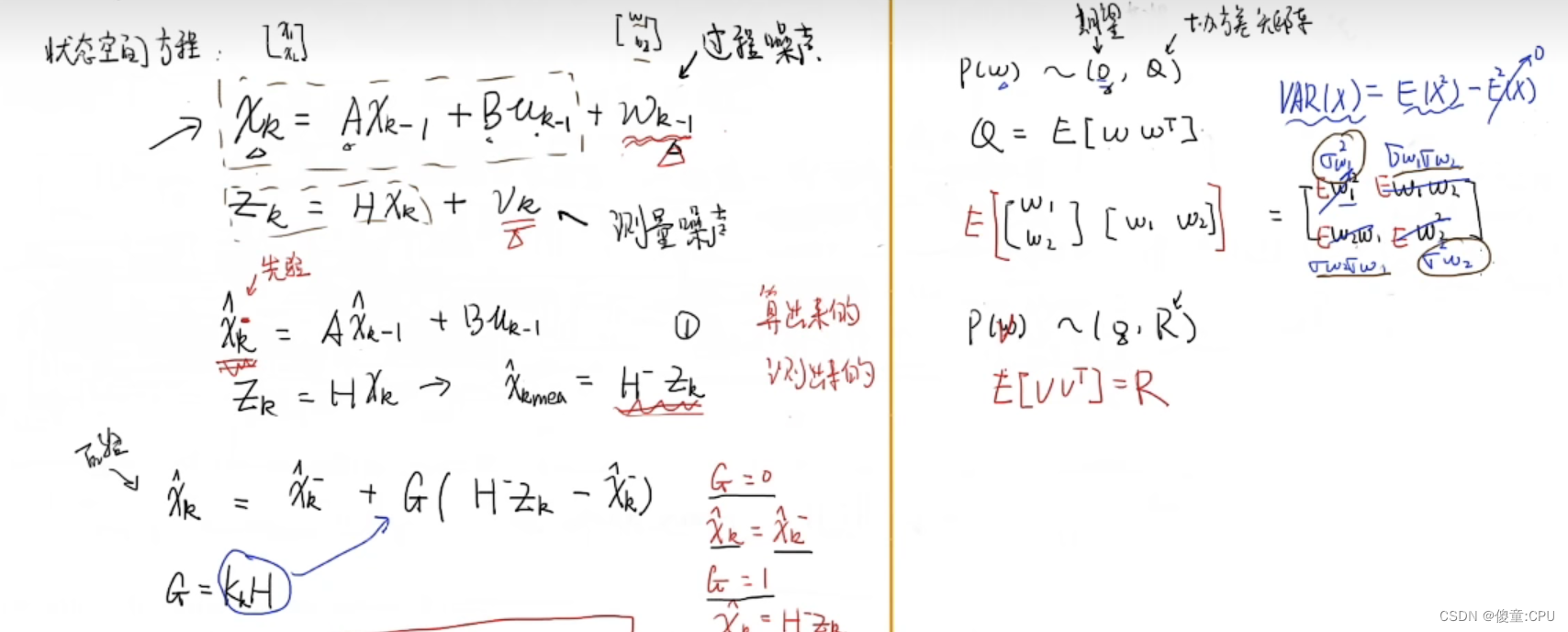
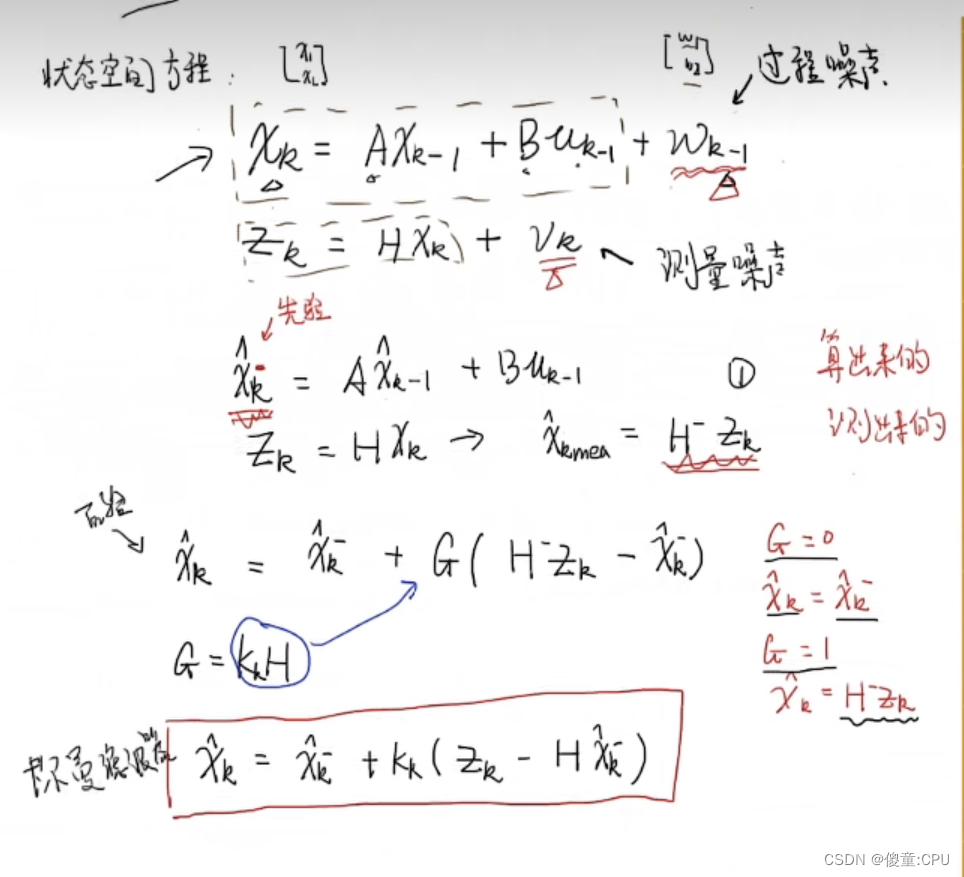
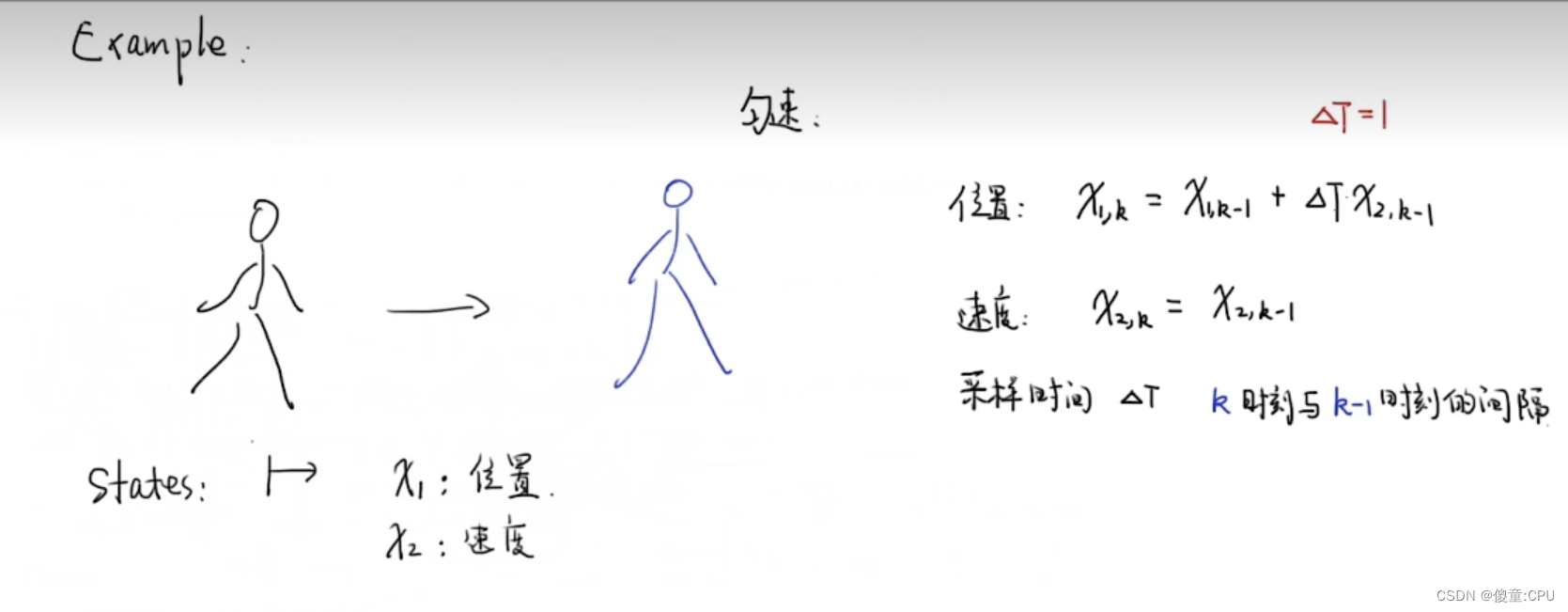
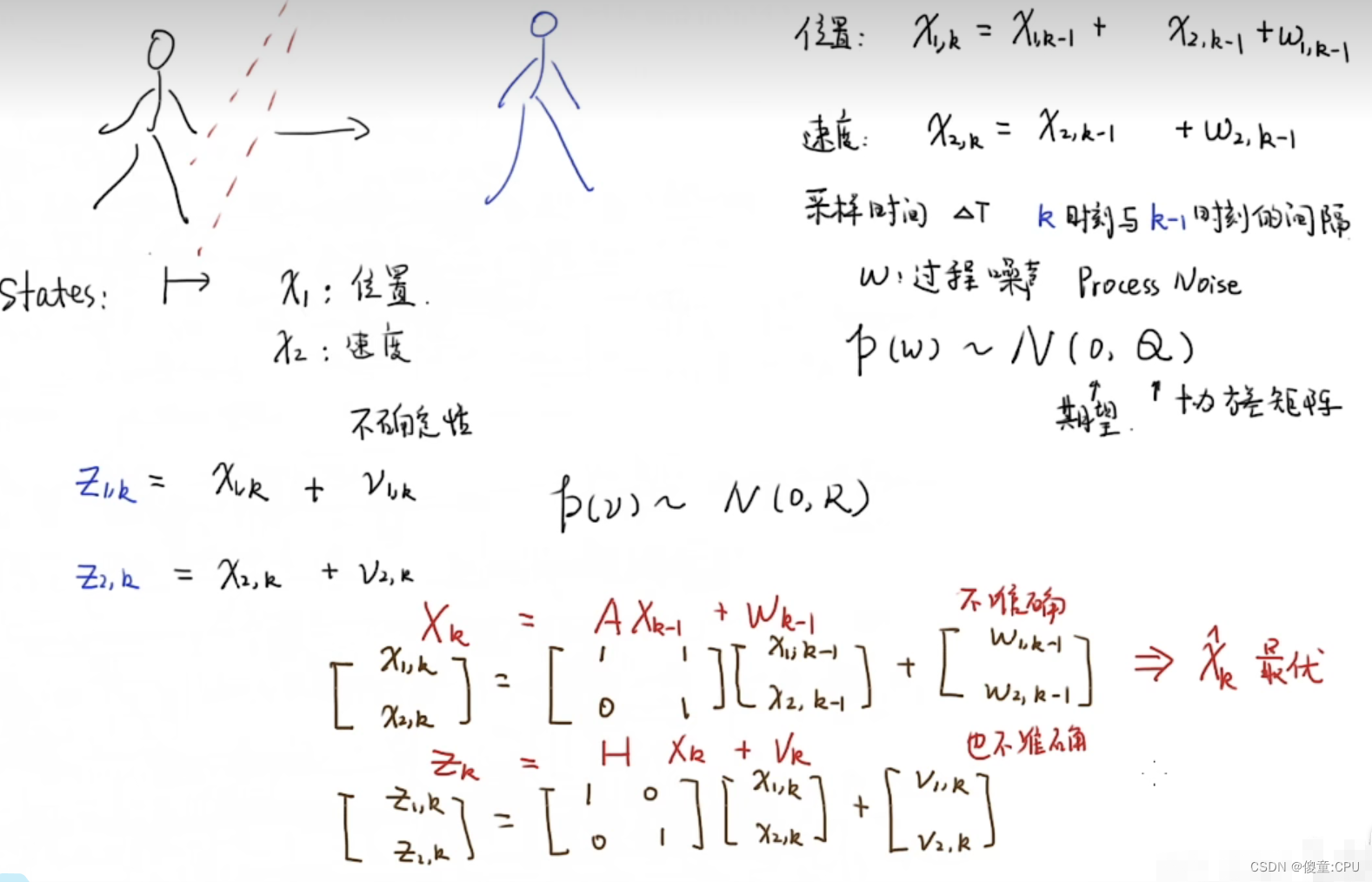
状态空间方程、观测器
状态方程是指刻画系统输入和状态关系的表达式。状态向量所满足的向量常微分方程称为控制系统的状态方程。状态方程是控制系统数学模型的重要组成部分。
状态观测器是根据系统的外部变量(输入变量和输出变量)的实测值得出状态变量估计值的一类动态系统,也称为状态重构器。
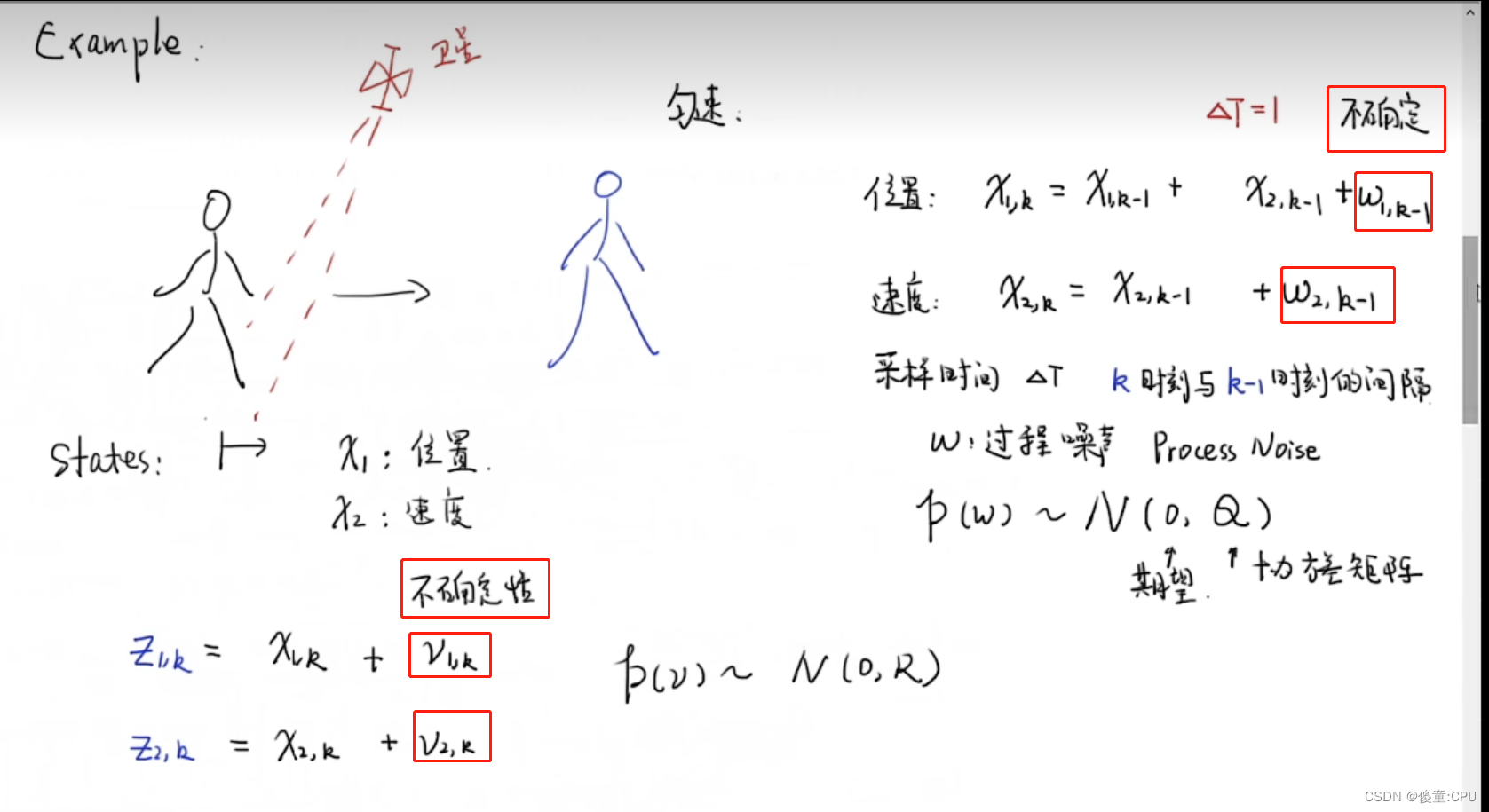
考虑到各种不确定性
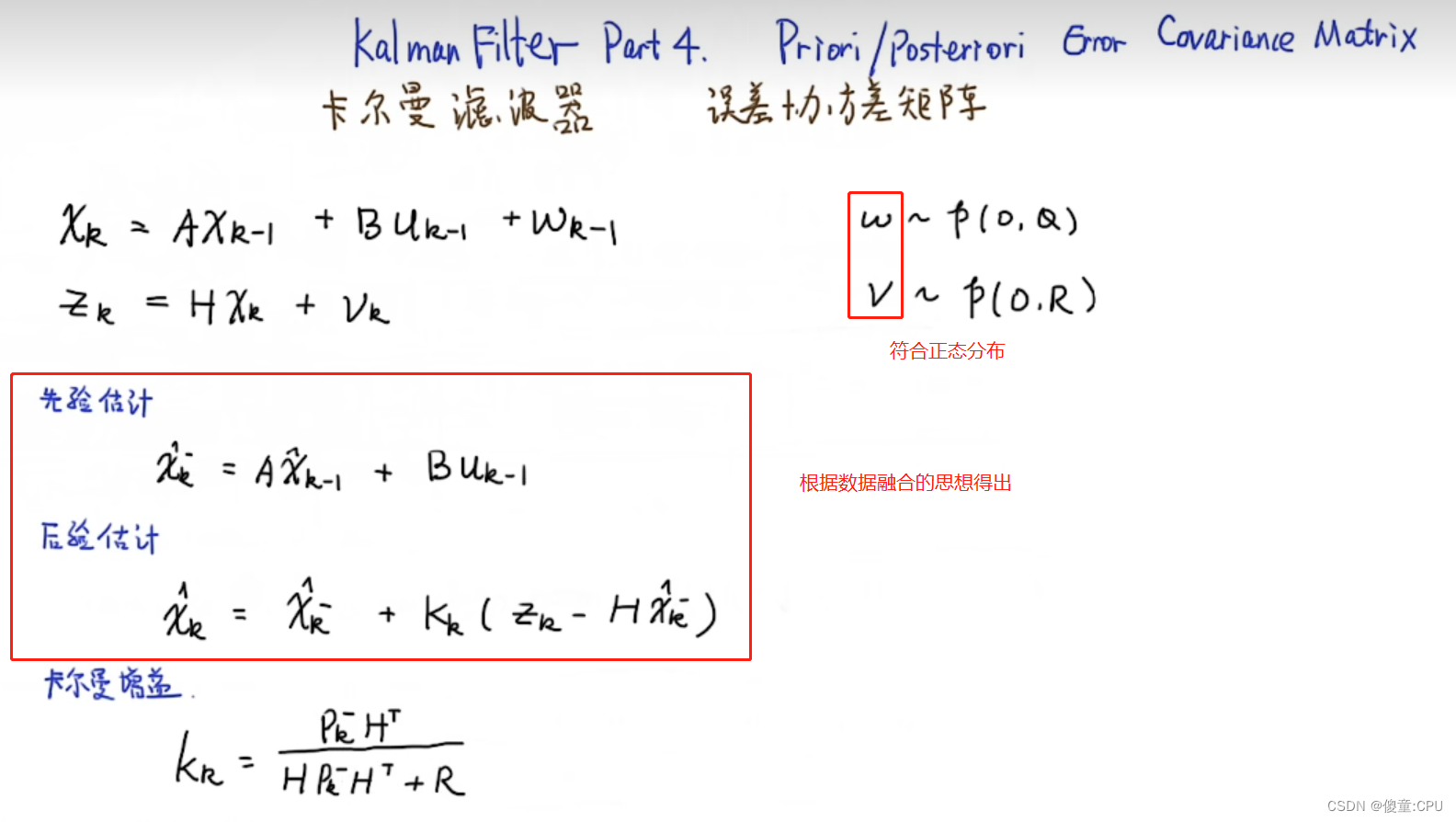
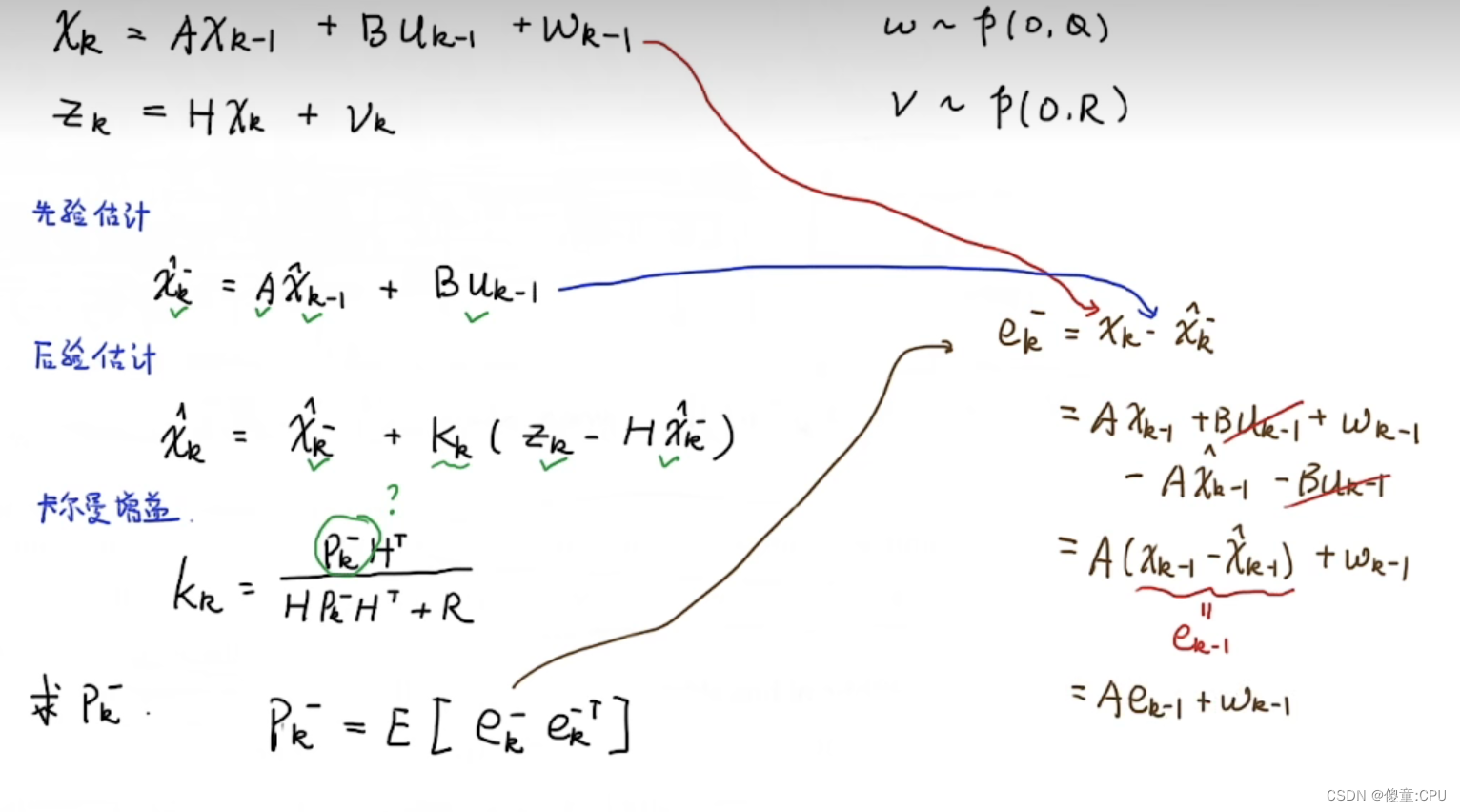
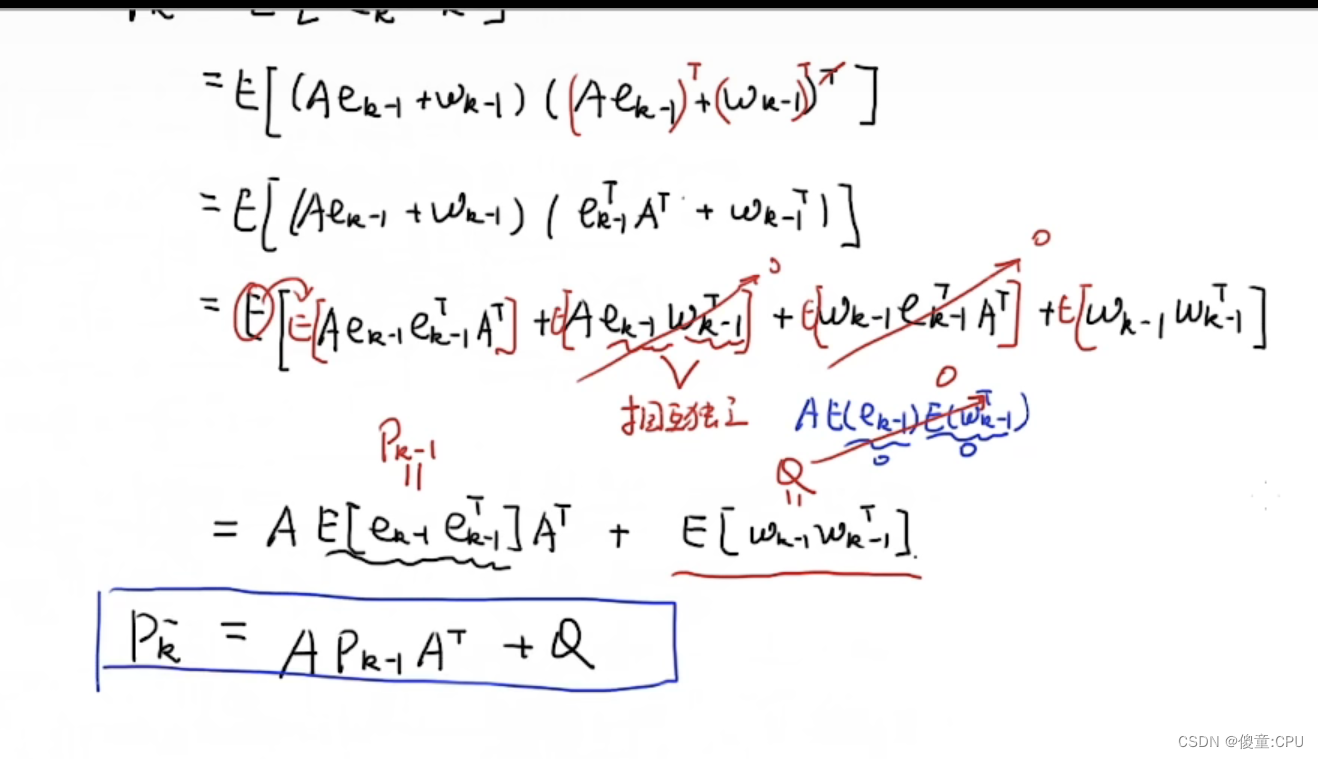
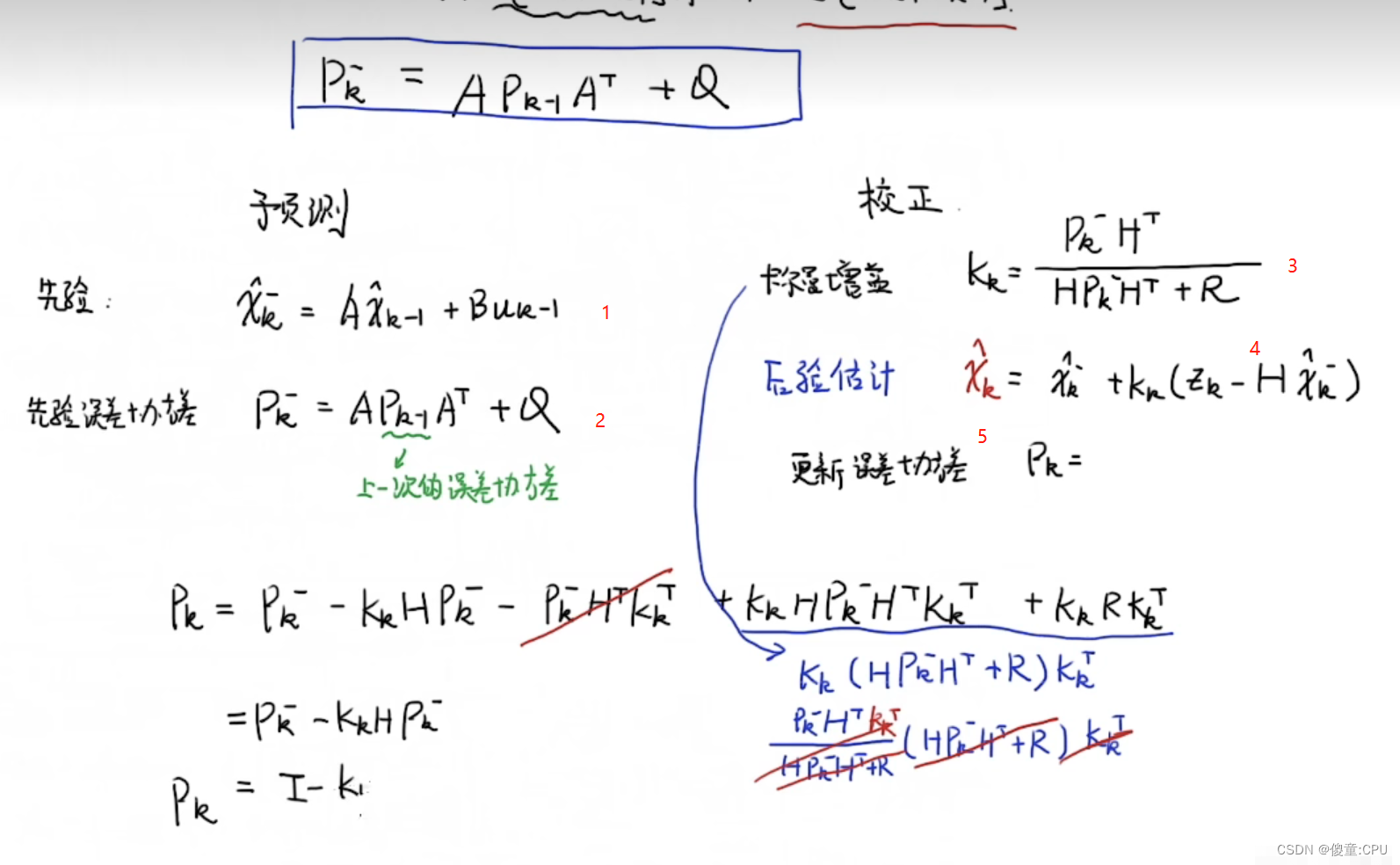
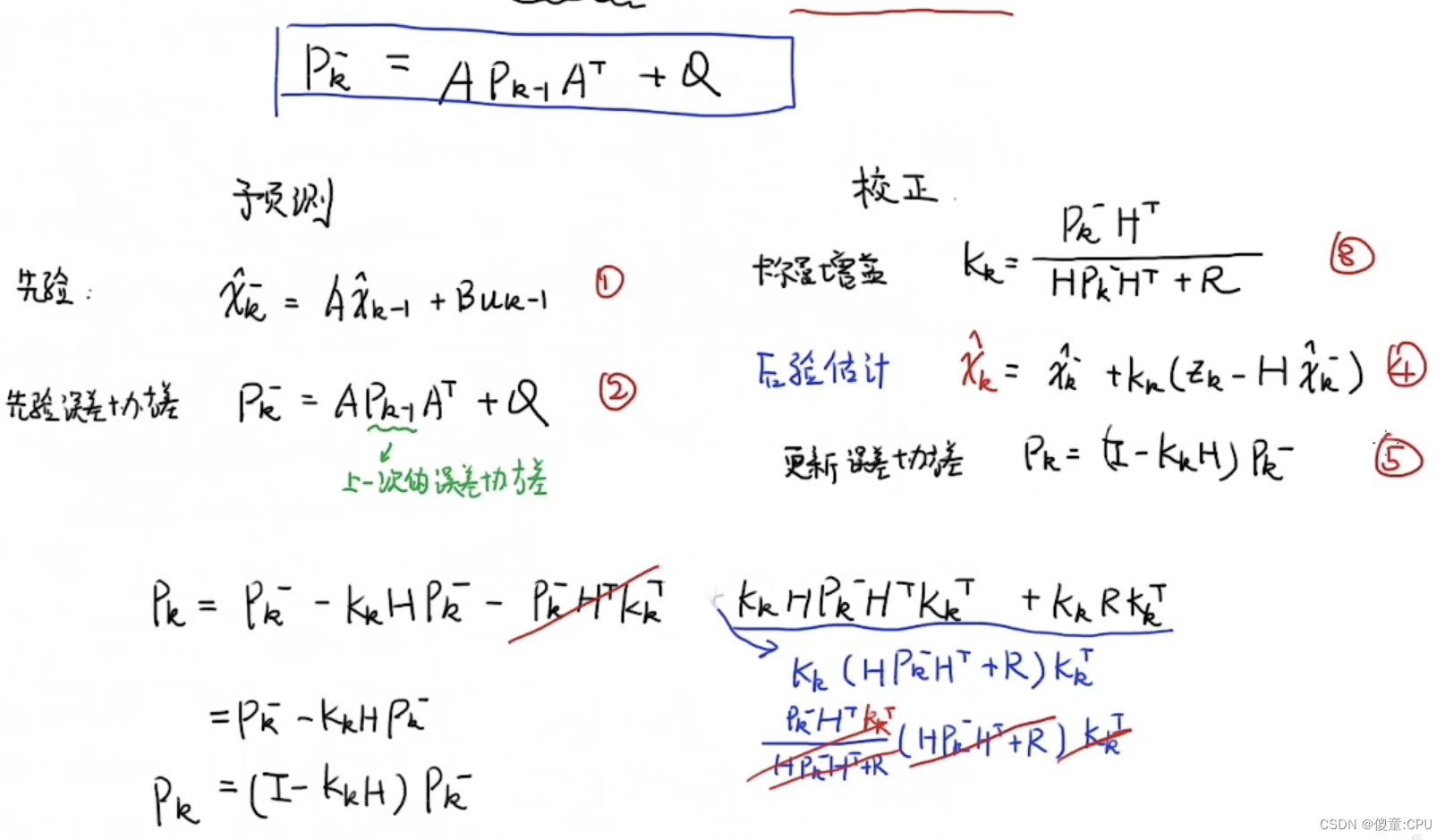
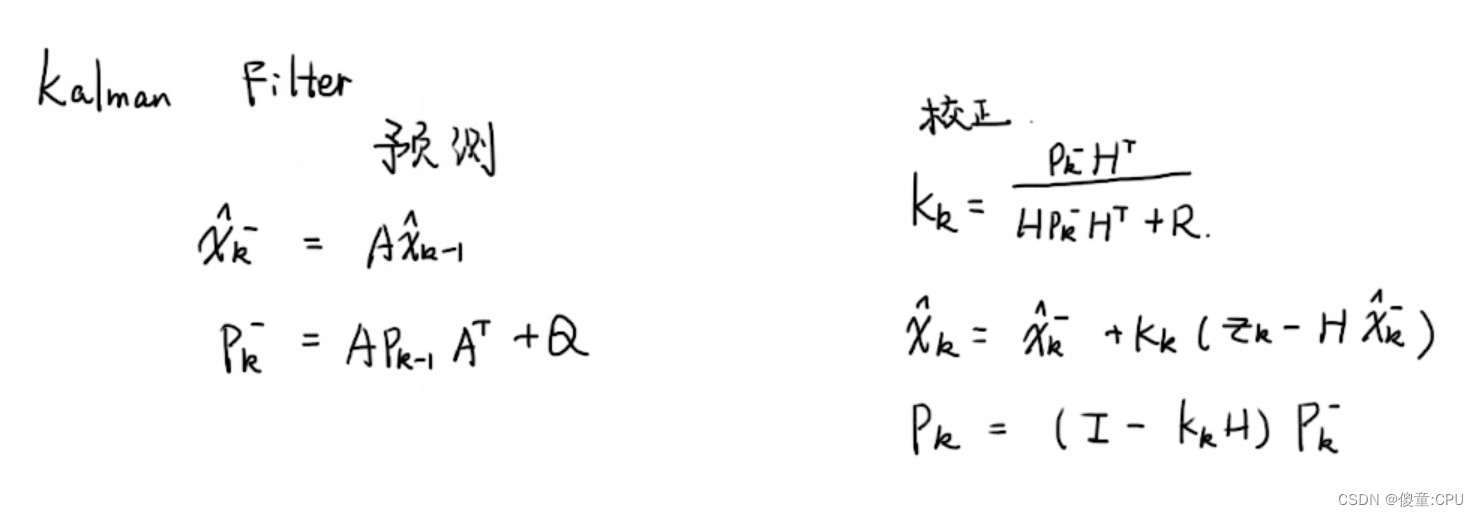
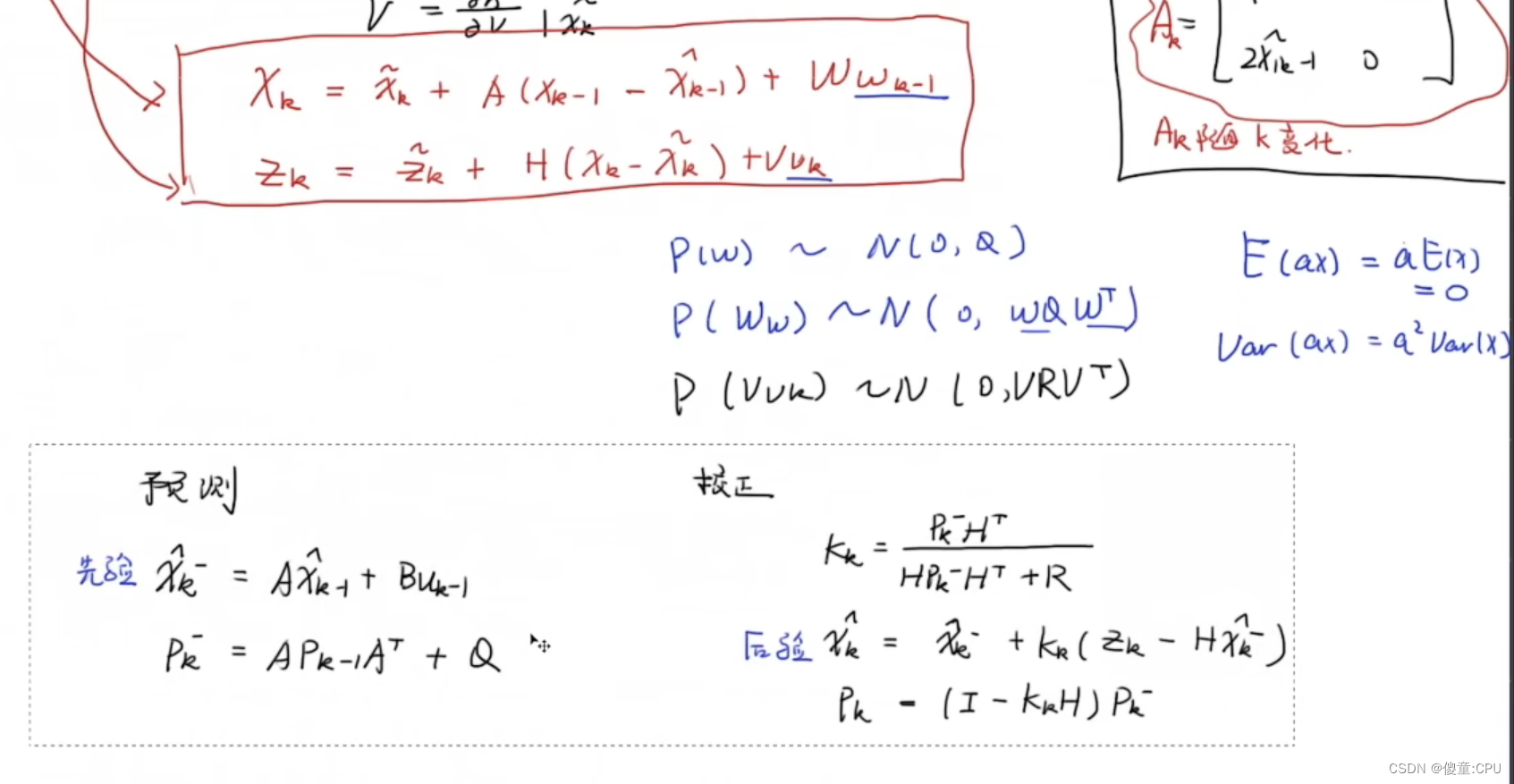
卡尔曼滤波器的数学推导
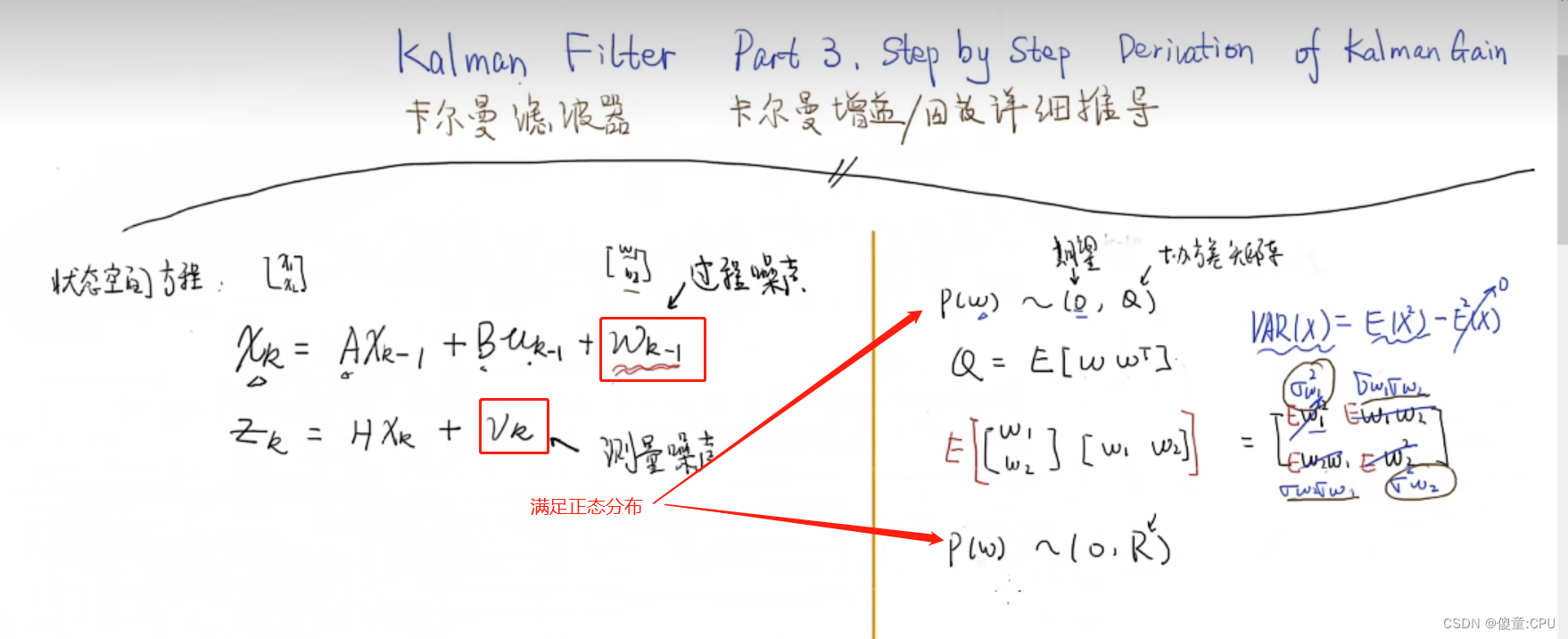
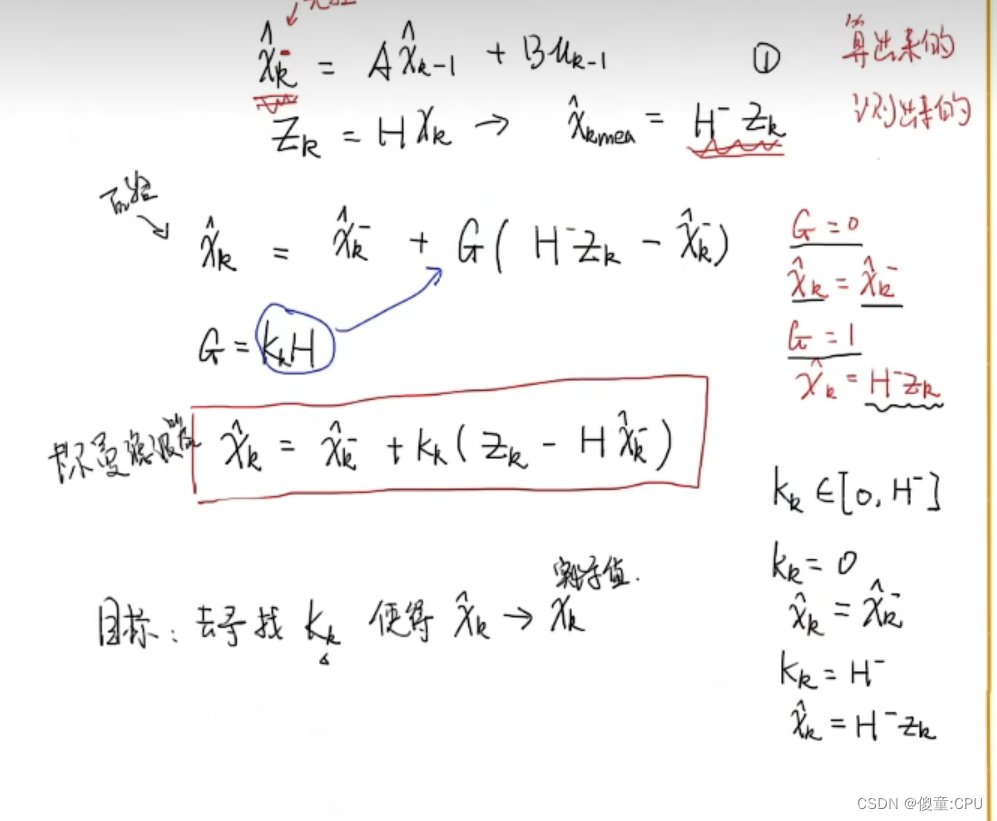
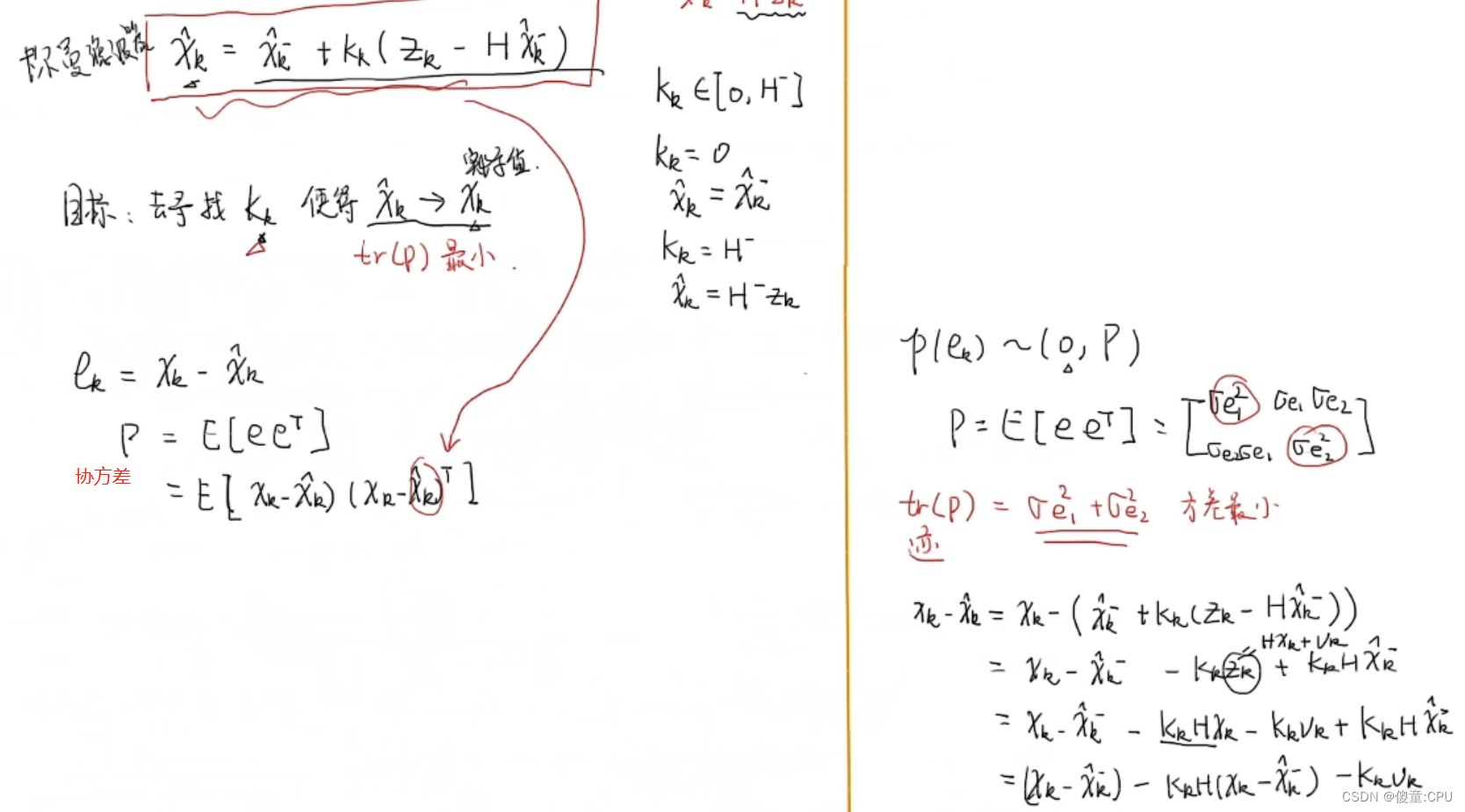
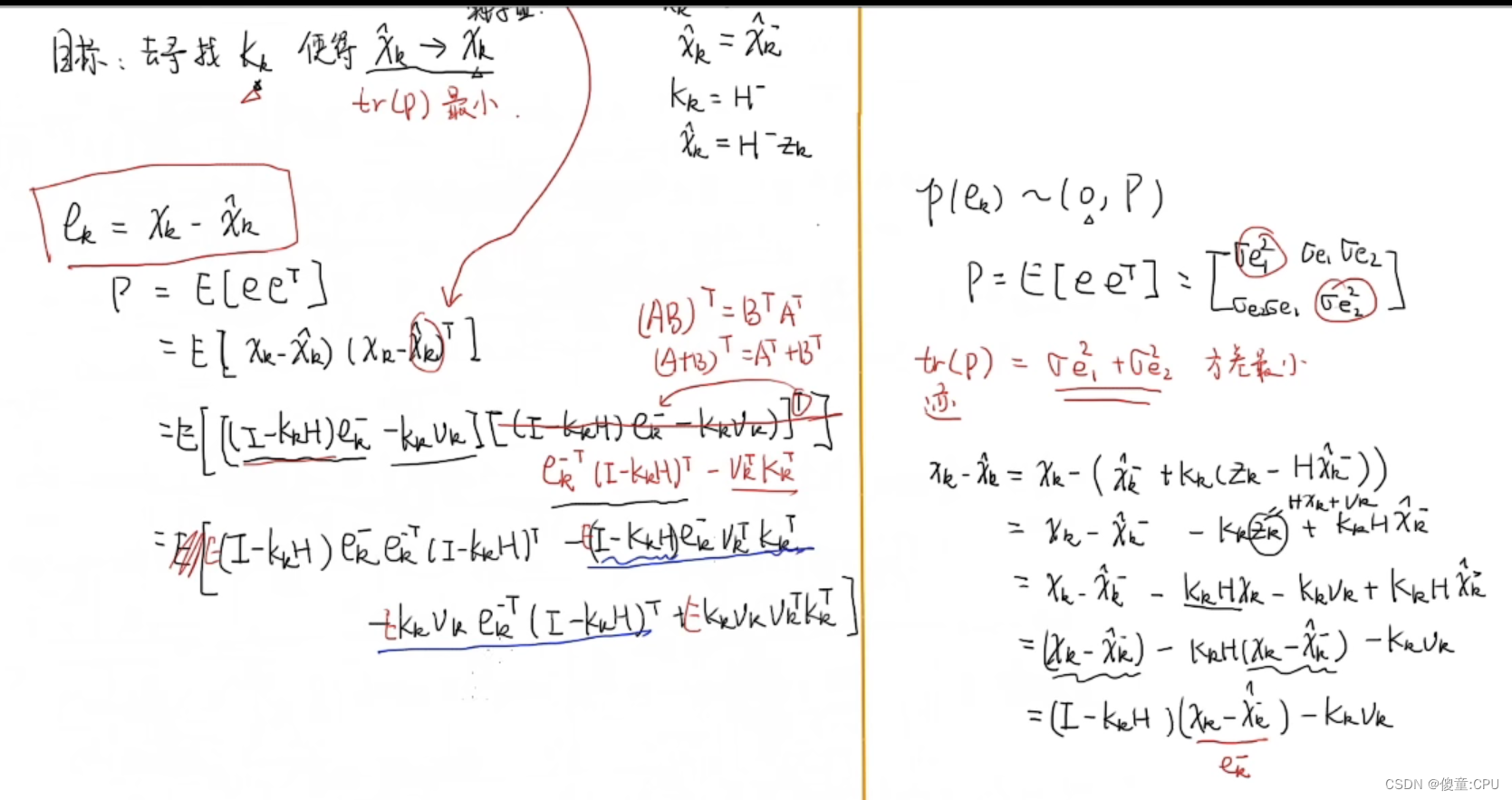
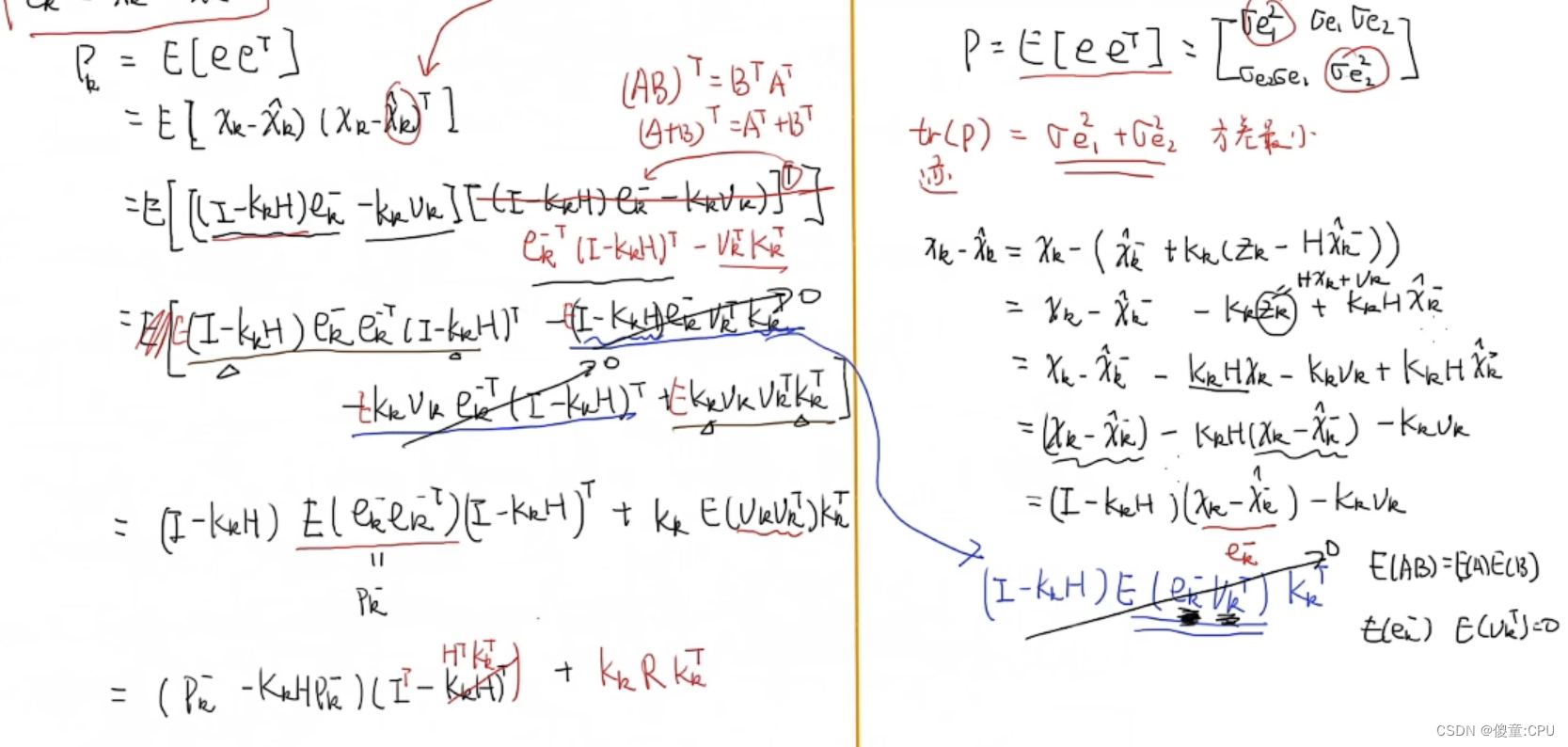
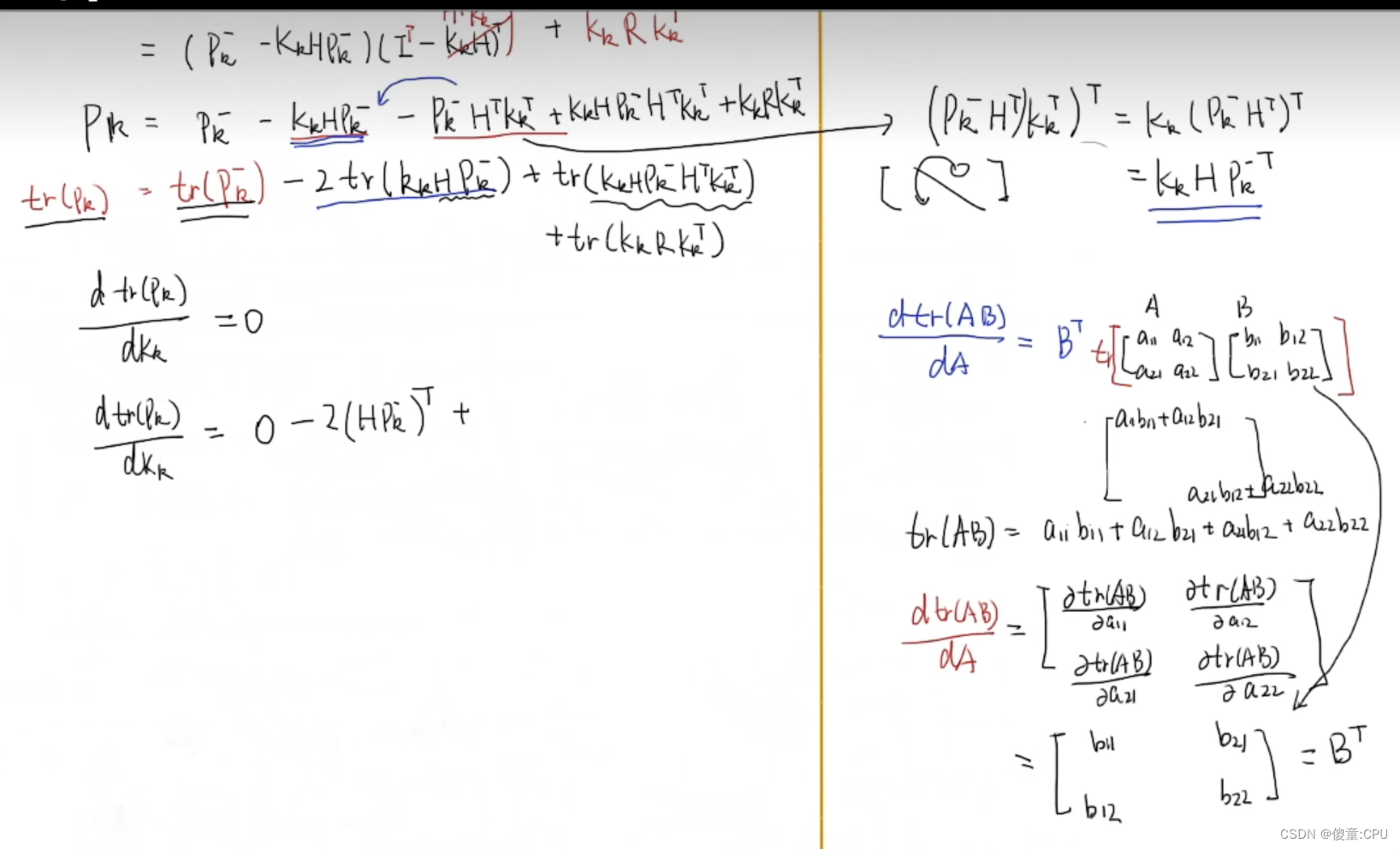

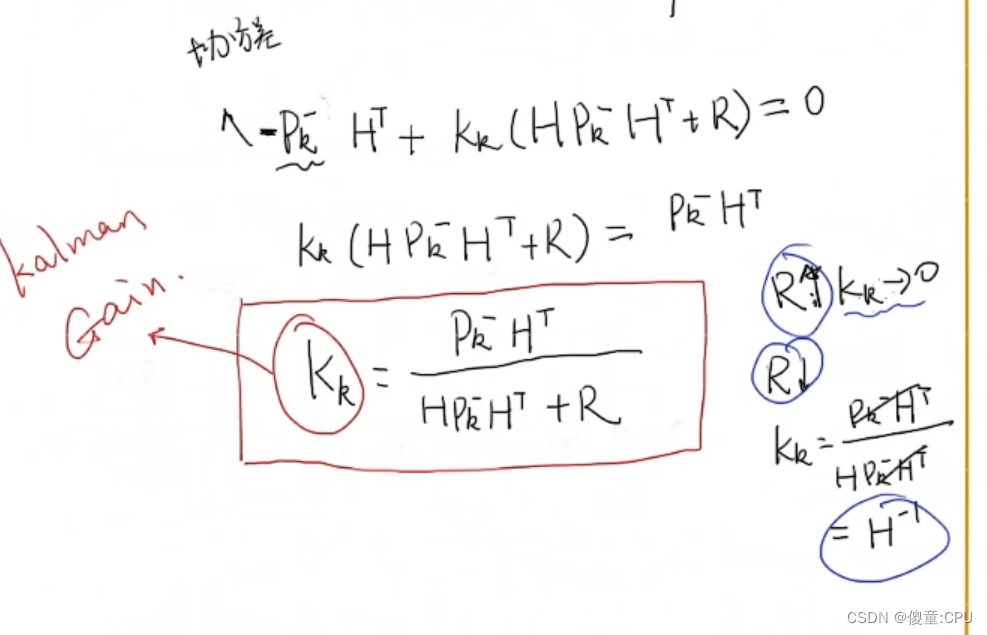
误差协方差矩阵
例子
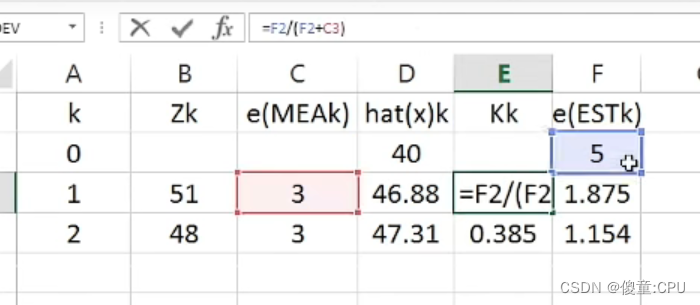
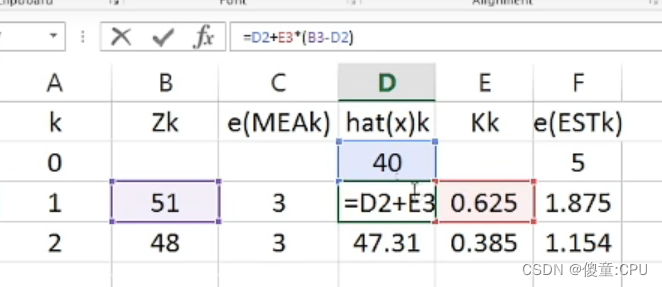
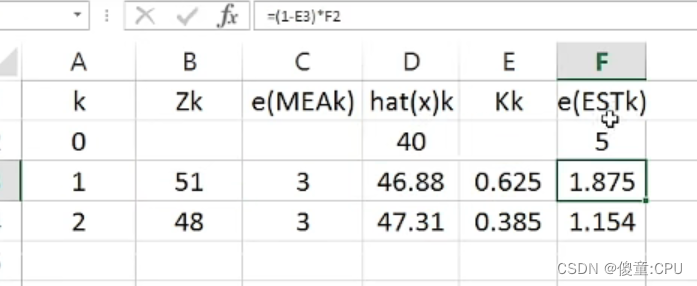
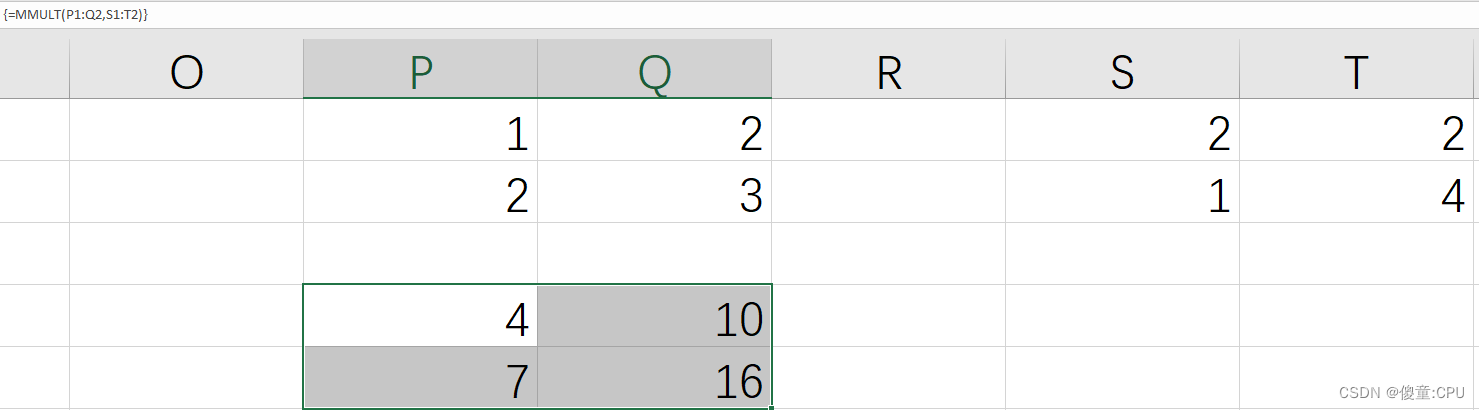
使用Excel计算矩阵
=MMULT(P1:Q2,S1:T2) 讯享网
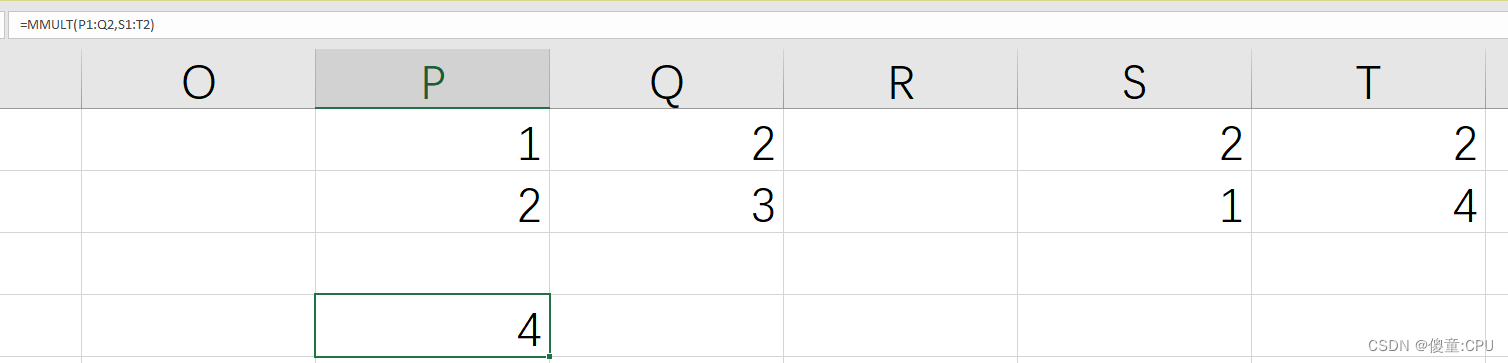
先选中四个框,然后按下F2,然后按组合键ctrl+shift+enter
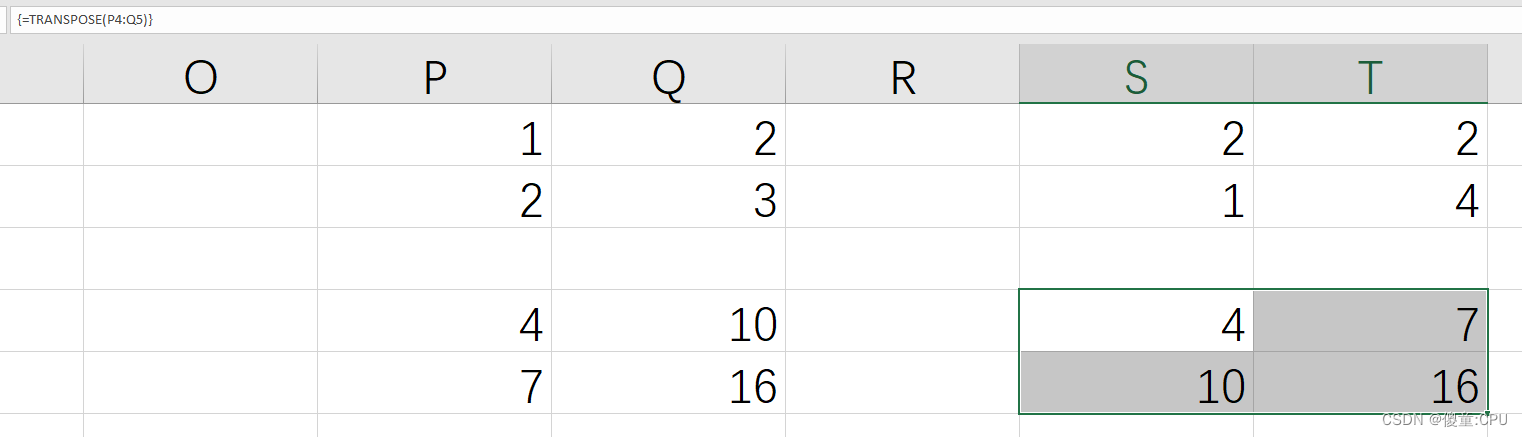
算举证的转置
讯享网=TRANSPOSE(P4:Q5)
先计算在一个框内,然后按下F2,然后按组合键ctrl+shift+enter
算矩阵的逆
=MINVERSE(S4:T5) 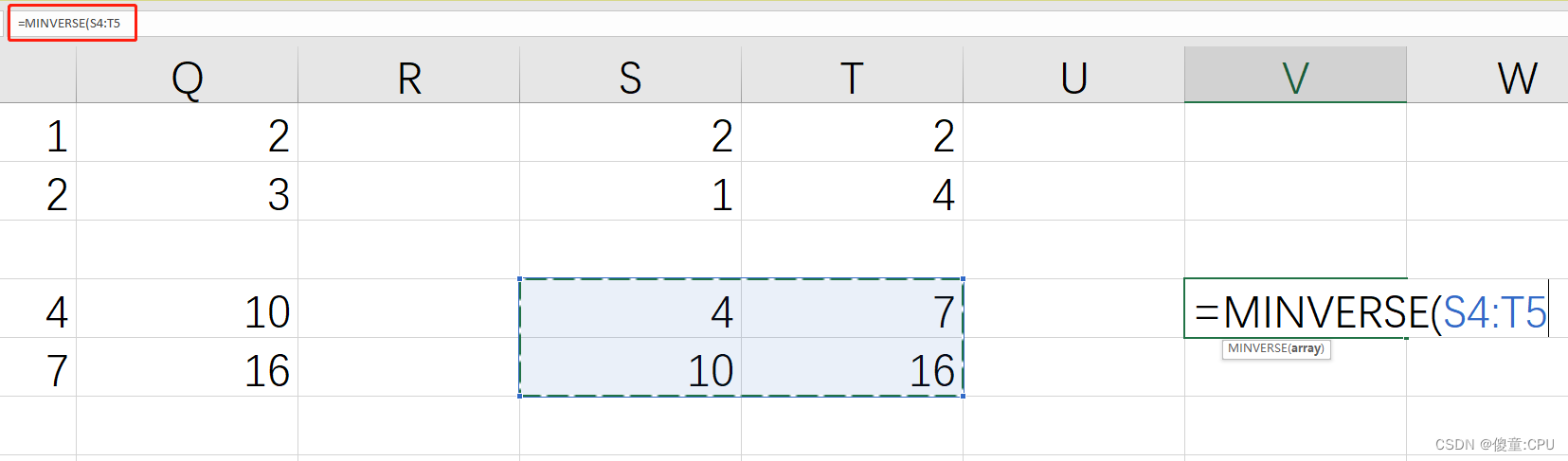
先选中四个框,然后按下F2,然后按组合键ctrl+shift+enter

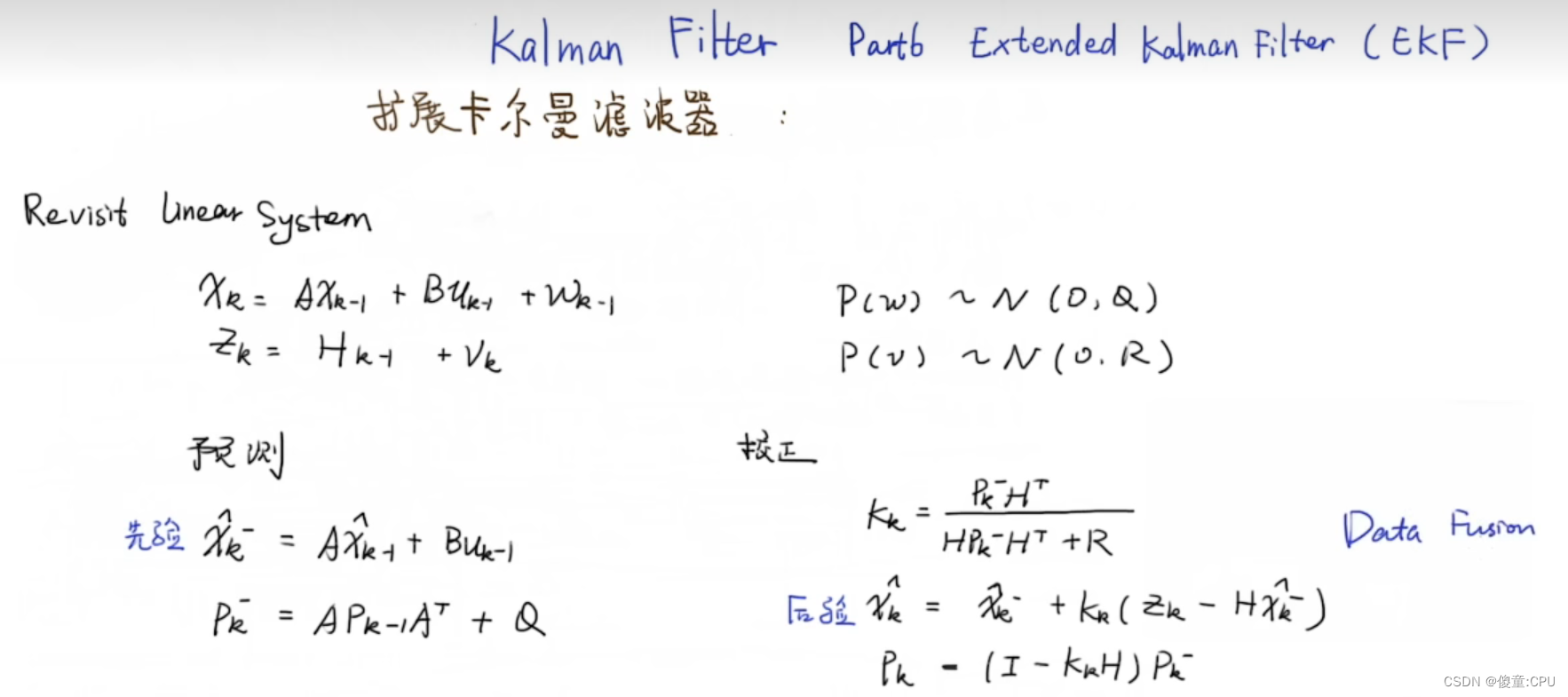
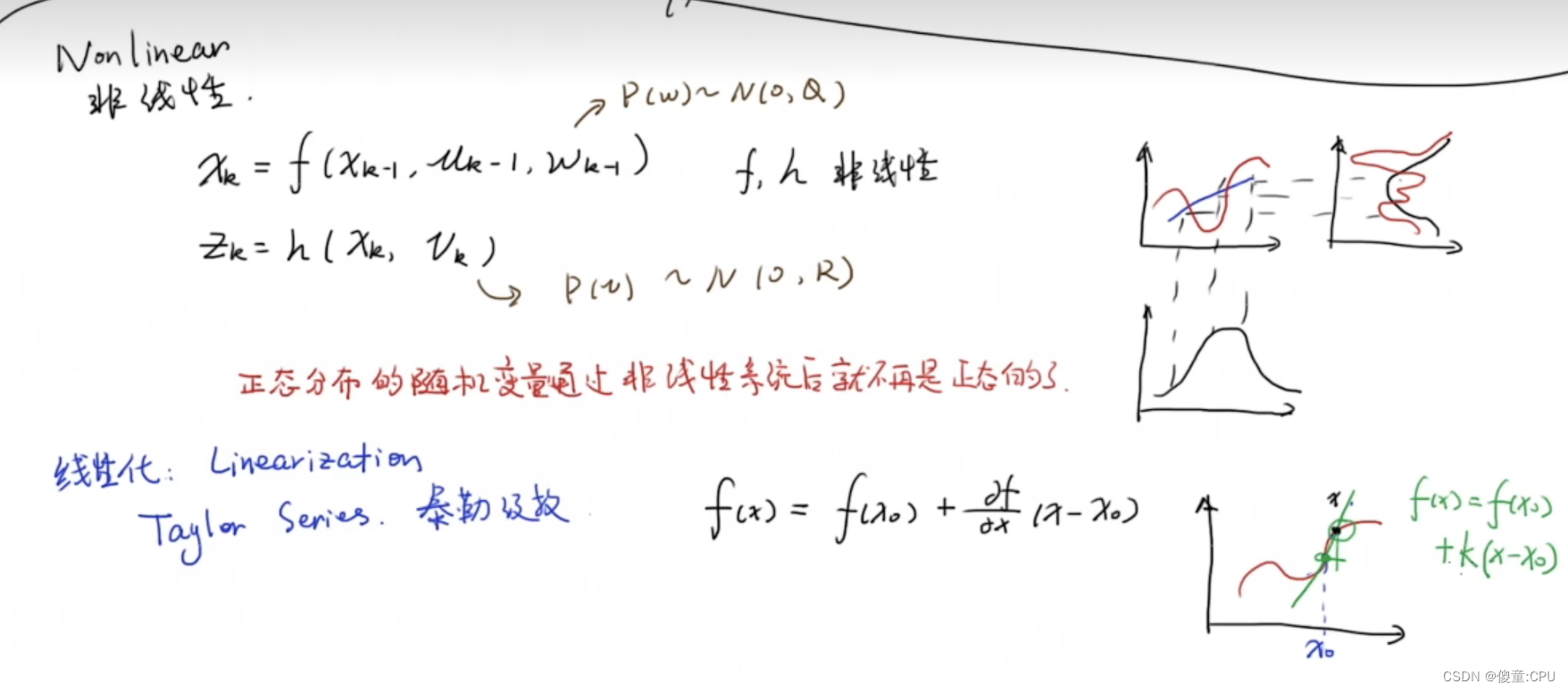
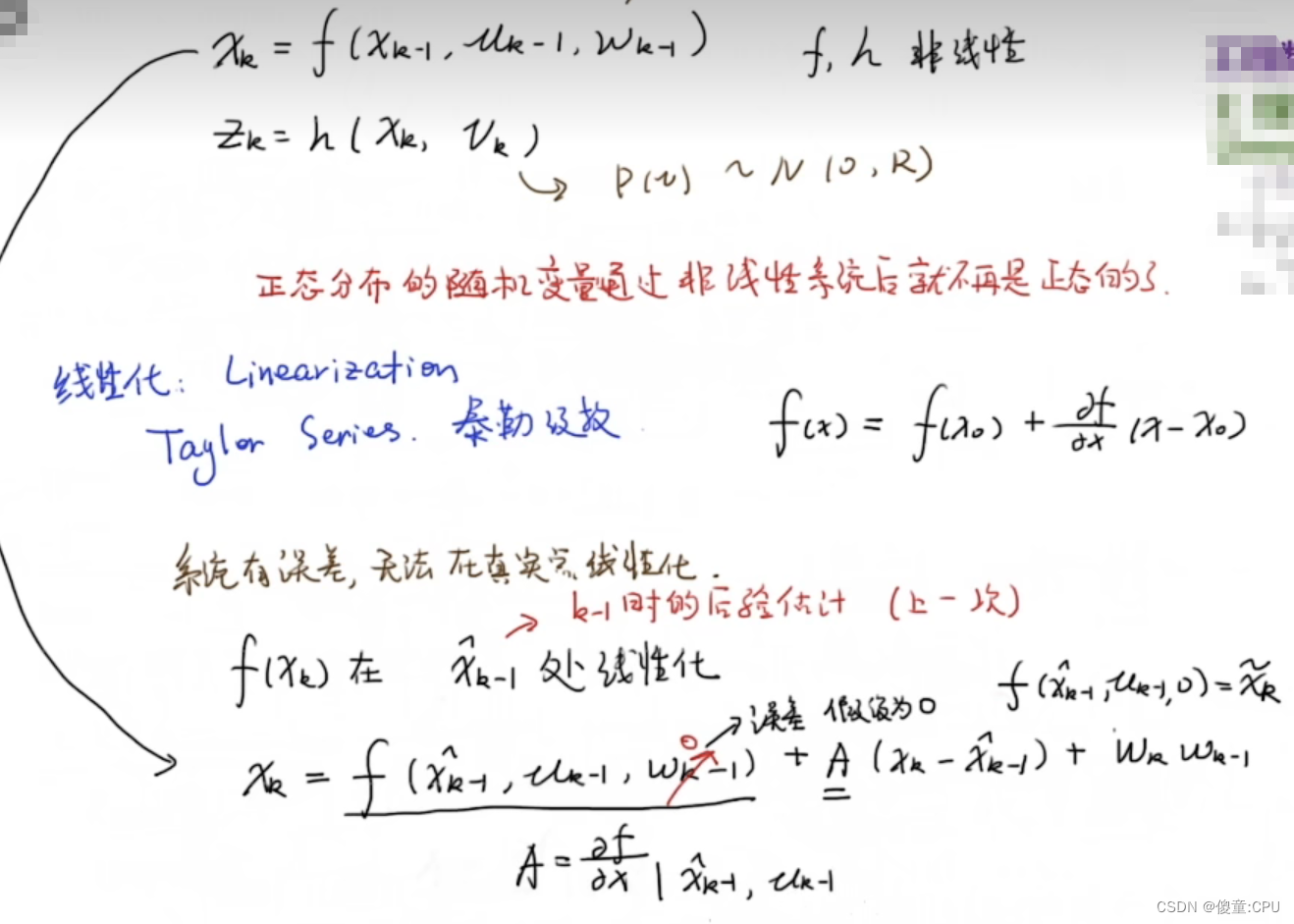
扩展卡尔曼滤波器
想线性化一个系统,需要找到一个点去线性化。这个点最好是真实点。

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/48009.html