
一、基础概念
Nyqusit稳定盘踞利用开环系统幅相频率特性(Nyquist图)来判断闭环系统稳定性。理论基础是复变函数理论中的幅角定理,即映射定理。
S平面上的Nyquist轨迹是用于分析控制系统稳定性的一种图形表示方法。Nyquist轨迹是一个极坐标图,其中频率响应曲线的实部和虚部分别作为横纵坐标。Nyquist轨迹的形状可以帮助我们判断系统的稳定性。如果Nyquist轨迹的绕点次数等于系统的极点数,那么系统就是稳定的。如果Nyquist轨迹的绕点次数小于系统的极点数,那么系统就是不稳定的。如果Nyquist轨迹的绕点次数大于系统的极点数,那么系统就是不稳定的。Nyquist轨迹的形状还可以帮助我们分析系统的相位裕度和增益裕度。Nyquist轨迹的形状越远离虚轴,系统的相位裕度和增益裕度就越大。Nyquist轨迹的形状越靠近虚轴,系统的相位裕度和增益裕度就越小。Nyquist轨迹的形状还可以帮助我们分析系统的稳定裕度。如果Nyquist轨迹的形状越远离虚轴,系统的稳定裕度就越大。如果Nyquist轨迹的形状越靠近虚轴,系统的稳定裕度就越小。
简单来说就是,P-Z=N.这里,P是开环系统的极点数,Z是闭环系统的极点数,N是逆时针绕(-1,j0)的圈数。系统稳定就是,闭环系统在右半平面没有极点,即Z=0,P=N.(注:均在复平面右半平面,ie.Nyquist contour)。
稳定裕度
增益裕度是指系统在保持稳定的前提下,可以承受多大的增益变化。增益裕度越大,系统的稳定性就越好。在控制系统中,增益裕度通常用分贝(dB)来表示。增益裕度的计算方法是:在系统的幅频特性曲线上,从相位为-180度的交点开始,到幅值为1的交点结束,这段距离的倒数就是增益裕度。
相位裕度
相位裕度是指系统在保持稳定的前提下,可以承受多大的相位变化。相位裕度越大,系统的稳定性就越好。在控制系统中,相位裕度通常用角度来表示。相位裕度的计算方法是:在系统的幅频特性曲线上,从相位为-180度的交点开始,到幅值为1的交点结束,这段距离的差值就是相位裕度 。
二、MATLAB应用实例
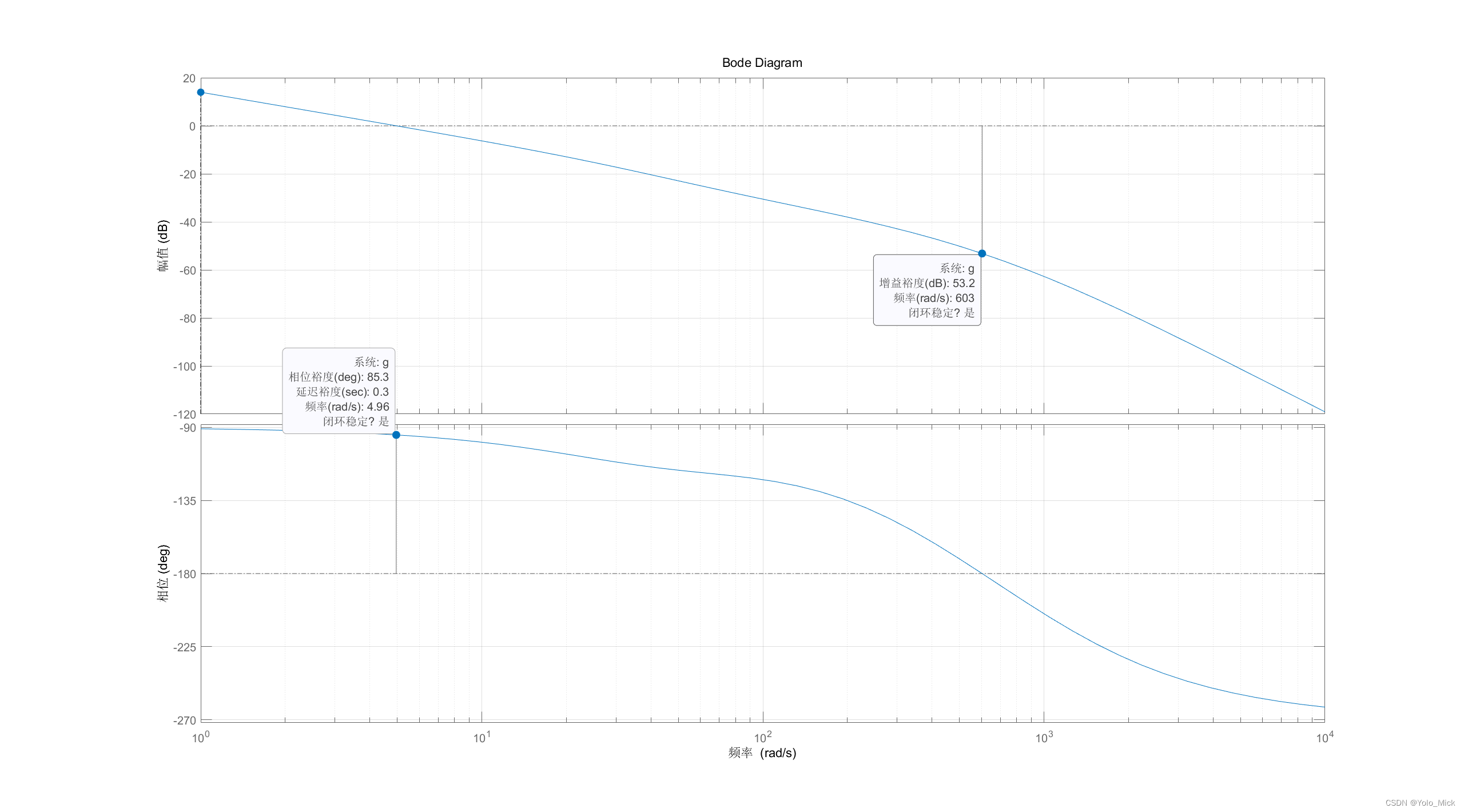
clc;clear; n=5*[0.0167,1]; d=conv(conv([0.03,1],[1,0]),conv([0.0025,1],[0.001,1])); g=tf(n,d) w=logspace(0,4,50); bode(g,w);grid; [Gm,Pm,Wcg,Wcp]=margin(g)输出:
g =
0.0835 s + 5
--------------------------------------------
7.5e-08 s^4 + 0.0001075 s^3 + 0.0335 s^2 + s
Continuous-time transfer function.
455.4076
85.2751
602.5259
4.9620

讯享网clc;clear; k=[5 500 800 3000];%varing oprn loop voltage gain for j=1:4 n=k(j)*[0.0167,1]; d=conv(conv([1,0],[0.03,1]),conv([0.0025,1],[0.001,1])); g=tf(n,d); y(j)=allmargin(g); %calculating the magnitude margin,angular margin and corresponding frequencies end y1=y(1) y2=y(2) y3=y(3) y4=y(4)
运行结果:
y1 =
包含以下字段的 struct:
GainMargin: 455.4076
GMFrequency: 602.5259
PhaseMargin: 85.2751
PMFrequency: 4.9620
DelayMargin: 0.2999
DMFrequency: 4.9620
Stable: 1
包含以下字段的 struct:
GainMargin: 4.5541
GMFrequency: 602.5259
PhaseMargin: 39.7483
PMFrequency: 237.7216
DelayMargin: 0.0029
DMFrequency: 237.7216
Stable: 1
包含以下字段的 struct:
GainMargin: 2.8463
GMFrequency: 602.5259
PhaseMargin: 27.7092
PMFrequency: 329.9063
DelayMargin: 0.0015
DMFrequency: 329.9063
Stable: 1
包含以下字段的 struct:
GainMargin: 0.7590
GMFrequency: 602.5259
PhaseMargin: -6.7355
PMFrequency: 690.5172
DelayMargin: 0.0089
DMFrequency: 690.5172
Stable: 0
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/46546.html