
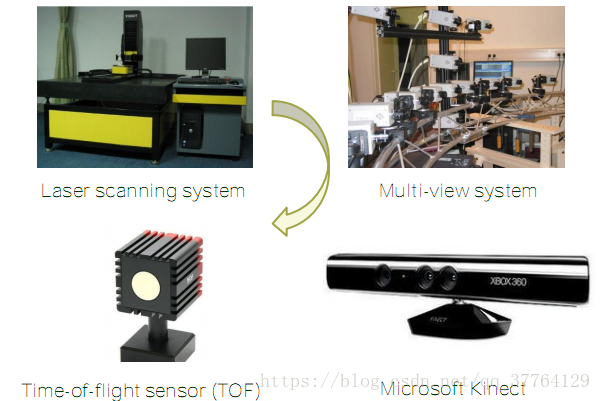
深度相机按照深度测量原理不同,一般分为:飞行时间法、结构光法、双目立体视觉法。本文就来说一说飞行时间法。
一、TOF简介
飞行时间是从Time of Flight直译过来的,简称TOF。其基本原理是通过连续发射光脉冲(一般为不可见光)到被观测物体上,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。这种技术跟3D激光传感器原理基本类似,只不过3D激光传感器是逐点扫描,而TOF相机则是同时得到整幅图像的深度信息。TOF相机与普通机器视觉成像过程也有类似之处,都是由光源、光学部件、传感器、控制电路以及处理电路等几部单元组成。与同属于非侵入式三维探测、适用领域非常类似的双目测量系统相比,TOF相机具有根本不同的3D成像机理。双目立体测量通过左右立体像对匹配后,再经过三角测量法来进行立体探测,而TOF相机是通过入、反射光探测来获取的目标距离获取。
TOF技术采用主动光探测方式,与一般光照需求不一样的是,TOF照射单元的目的不是照明,而是利用入射光信号与反射光信号的变化来进行距离测量,所以,TOF的照射单元都是对光进行高频调制之后再进行发射,比如下图所示的采用LED或激光二极管发射的脉冲光,脉冲可达到100MHz。与普通相机类似,TOF相机芯片前端需要一个搜集光线的镜头。不过与普通光学镜头不同的是这里需要加一个带通滤光片来保证只有与照明光源波长相同的光才能进入。同时由于光学成像系统具有透视效果,不同距离的场景为各个不同直径的同心球面,而非平行平面,所以在实际使用时,需要后续处理单元对这个误差进行校正。作为TOF的相机的核心,TOF芯片每一个像元对入射光往返相机与物体之间的相位分别进行纪录。该传感器结构与普通图像传感器类似,但比图像传感器更复杂,它包含2个或者更多快门,用来在不同时间采样反射光线。因为这种原因,TOF芯片像素比一般图像传感器像素尺寸要大得多,一般100um左右。照射单元和TOF传感器都需要高速信号控制,这样才能达到高的深度测量精度。比如,照射光与TOF传感器之间同步信号发生10ps的偏移,就相当于1.5mm的位移。而当前的CPU 可到3GHz,相应得时钟周期是300ps,则相应得深度分辨率为45mm。运算单元主要是完成数据校正和计算工作,通过计算入射光与反射光相对相移关系,即可求取距离信息。
TOF的优势:与立体相机或三角测量系统比,TOF相机体积小巧,跟一般相机大小相去无几,非常适合于一些需要轻便、小体积相机的场合。TOF相机能够实时快速的计算深度信息,达到几十到100fps。TOF的深度信息。而双目立体相机需要用到复杂的相关性算法,处理速度较慢。TOF的深度计算不受物体表面灰度和特征影响,可以非常准确的进行三维探测。而双目立体相机则需要目标具有良好的特征变化,否则会无法进行深度计算。TOF的深度计算精度不随距离改变而变化,基本能稳定在cm级,这对于一些大范围运动的应用场合非常有意义。
二、TOF分类
TOF法根据调制方法的不同,一般可以分为两种:脉冲调制(Pulsed Modulation)和连续波调制(Continuous Wave Modulation)。
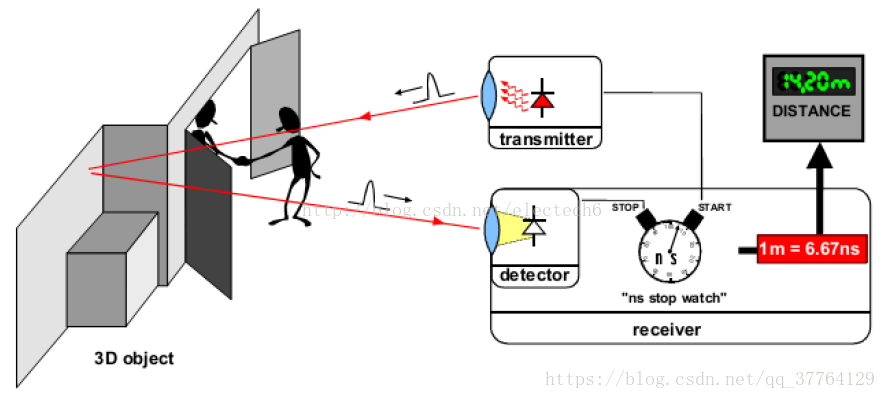
飞行时间法深度测量基本原理示意图
(一)脉冲调制
脉冲调制方案的原理比较简单,如下图所示。它直接根据脉冲发射和接收的时间差来测算距离。
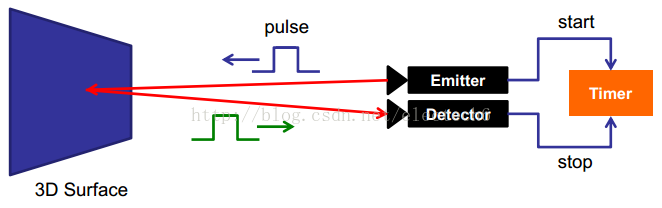
光脉冲法工作原理示意图
脉冲调制方案的照射光源一般采用方波脉冲调制,这是因为它用数字电路来实现相对容易。接收端的每个像素都是由一个感光单元(如光电二极管)组成,它可以将入射光转换为电流,感光单元连接着多个高频转换开关(下图的G0,G1)可以把电流导入不同的可以储存电荷(下图S0,S1)的电容里。

相机上的控制单元打开光源然后再关闭,发出一个光脉冲。在同一时刻,控制单元打开和关闭接收端的电子快门。接收端接收到的电荷S0被存储在感光元件中。
然后,控制单元第二次打开并关闭光源。这次快门打开时间较晚,即在光源被关闭的时间点打开。新接收到的电荷S1也被存储起来。具体过程如下图所示。
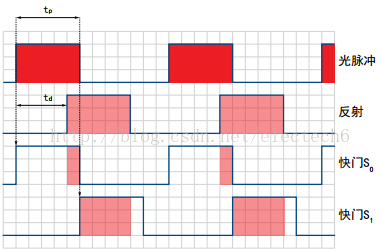
因为单个光脉冲的持续时间非常短,此过程会重复几千次,直到达到曝光时间。然后感光传感器中的值会被读出,实际距离可以根据这些值来计算。
记光的速度为c,tp为光脉冲的持续时间, S0表示较早的快门收集的电荷, S1表示延迟的快门收集的电荷,那么距离d可以由如下公式计算:

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/36195.html