
原文地址:https://tunmx.github.io/posts/CH-Camera-internal-and-external-parameters/
学习人脸3D重建的第一天,在首次接触3D相关的内容,必须要搞清楚相机的成像原理,如何将真实三维空间中的三维点与显示器、屏幕和图像等二维成像的平面映射,以及了解该过程的推导方式和相关坐标系的换算,如像素坐标,图像坐标,相机坐标以及世界坐标这四种关系的变换。
主要内容从以下博主的文章整理,并结合自己的实验代码进行测试,推荐直接看原帖,无中间商赚差价:
https://www.cnblogs.com/wangguchangqing/p/8126333.html#autoid-0-5-0
一文带你搞懂相机内参外参(Intrinsics & Extrinsics) - Yanjie Ze的文章 - 知乎
针孔模型
从图中所示,我们可以清楚的看到两种坐标系:
- 相机坐标系(3D):以光心中心点
 为原点,建立三维坐标系;
为原点,建立三维坐标系;
 为原点,建立
为原点,建立 三维坐标系;
三维坐标系; - 图像坐标系(2D):以被投射的平面中为原点,建立二维坐标系。
 为原点,建立
为原点,建立 二维坐标系。
二维坐标系。 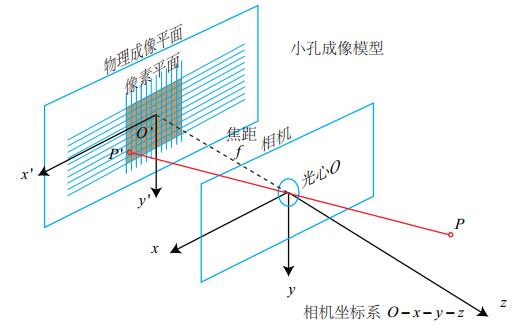
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/35592.html