
前言:ROS的出现使得机器人软件开发更加快速和模块化,在此基础上,Autoware.ai开源项目可以让我们很容易地将一套完整的自动驾驶软件部署到我们的测试车辆上,并见证它跑起来!
Autoware是一款“一体化”开源自动驾驶软件,能实现感知、决策、控制等功能,通过在Ubuntu中搭建Autoware开发环境和案例的运行,使大家对自动驾驶技术的实现有一个更清晰的认识。
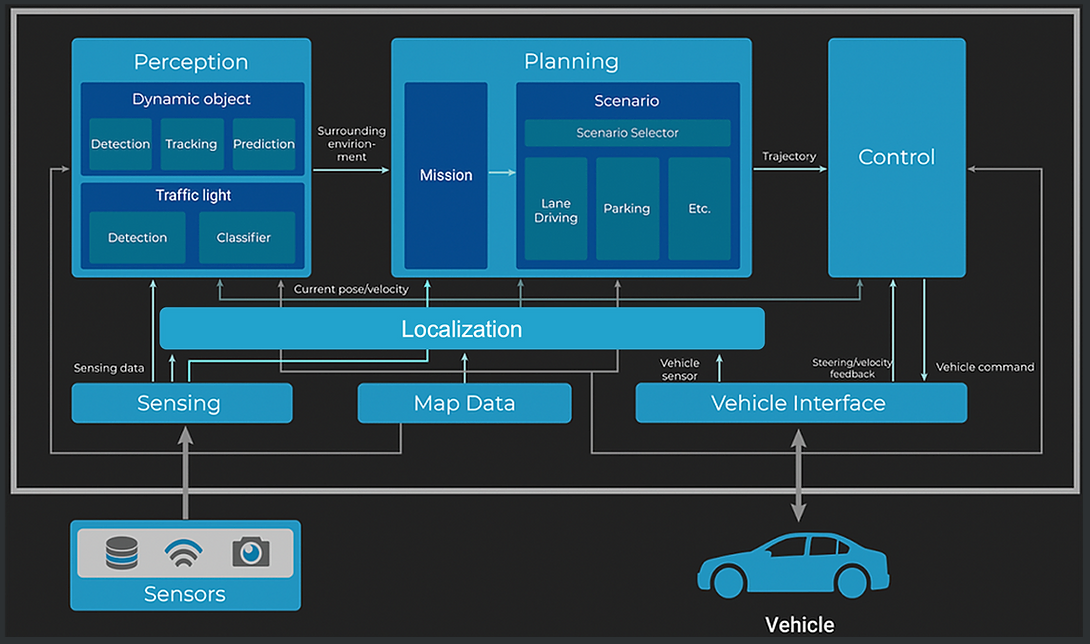
软件架构图如下:
- 硬件要求:
- 处理器-推荐i7,最低i5
- 运行内存-16G及以上
- 硬盘存储-100G及以上
- 显卡-暂无要求
- 软件要求:
- 操作系统-Ubuntu 18.04
- 框架&中间件-ROS Melodic
- 界面框架-Qt 5.12.0
- 自动驾驶软件-Autoware 1.13
由于大多数学习者电脑没有GPU,以下安装仅适用于版本。
推荐安装双系统,安装方法不再赘述!
rosdep update自动更新ros源的实现:
- 下载脚本: ;
- 管理员给定执行权限:;
- 管理员运行脚本:
- 出现这一行,代表成功:
- 然后依次执行: 和 即可。
------------失效,可用小鱼工具[3]rosdepc---------------
打开浏览器,在地址栏输入下面地址:
将会自动下载如下软件包:
在文件末尾添加:
保存后在终端执行:
要确认是否添加成功,可输入如下命令(输出Qt的路径表示配置成功):
至此,Qt creater安装完成,也可以进行qt开发。
因为Autoware1.14版本有很多BUG,目前还没有修复,用1.14版本的有很多包都是从1.13版本移植过来的,但1.12版本又缺失了很多模块,因为取其中选择了1.13版。
下载源码或者用我给定的源码(替换掉src文件夹即可):
编译cpu版本的autoware(注:如果更改了源码,即src文件夹,重新编译autoware工作区即可!)
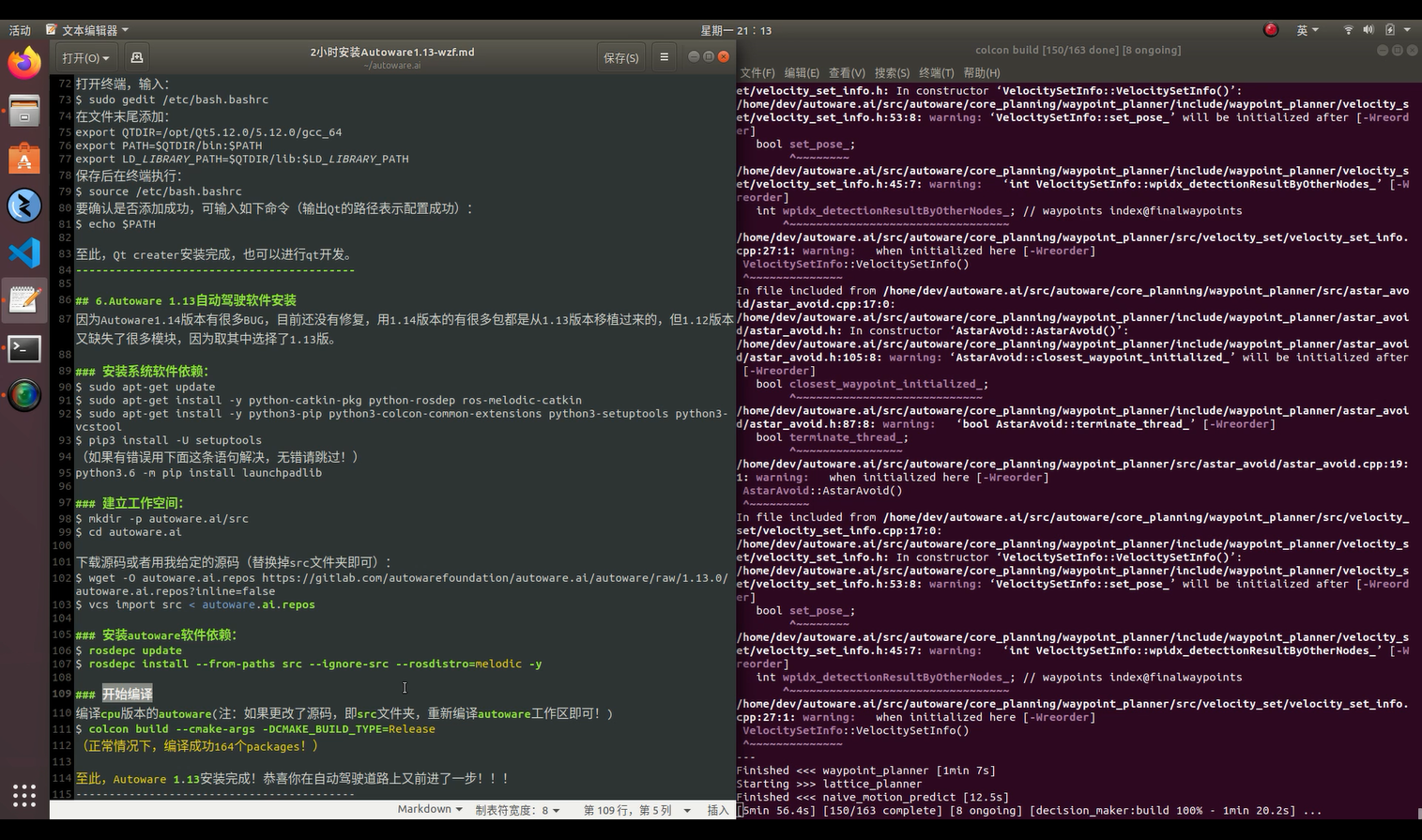
(正常情况下,编译成功164个packages!)
启动autoware:
界面如下:
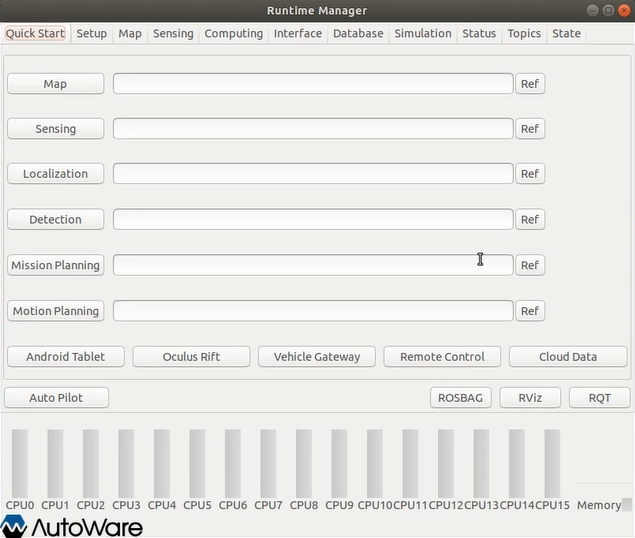
至此,Autoware 1.13安装完成!恭喜你在自动驾驶道路上又前进了一步!!!
以上。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/228155.html