
目录
一、点位表
二、脉冲输出控制
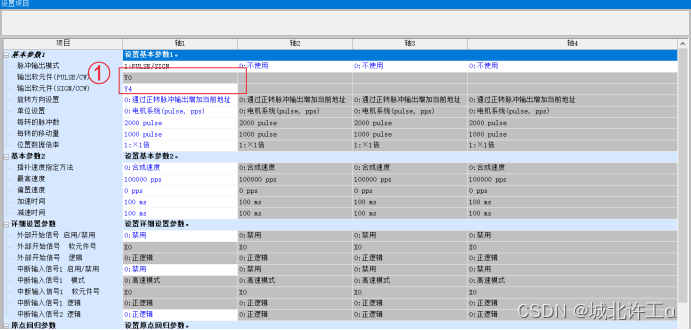
1.设置参数
2.变速脉冲输出DPLSY指令
3.程序编写
三、回原点控制
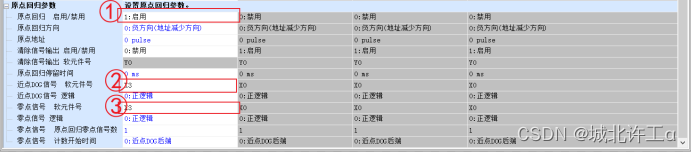
1.设置参数
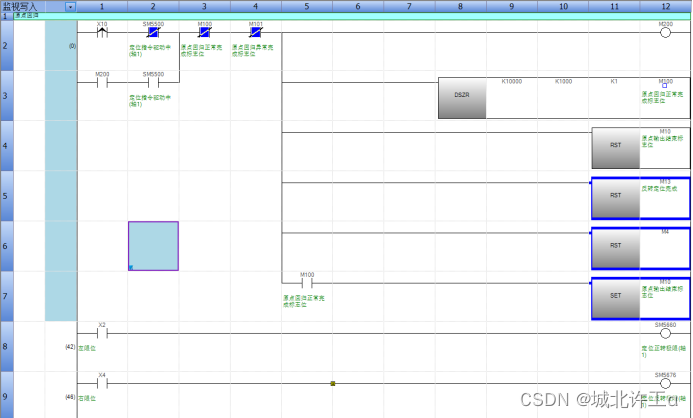
2.回原点DSZR指令
3.程序编写
四、相对定位控制
1.设置参数
2. 相对定位DDRVI指令
3.程序编写
五、绝对定位控制
1.参数设置
2.绝对定位DDRVA指令
3.程序编写
六、FX5U运动控制综合程序案例
一、点位表
| 步进驱动器 | |
| PUL+、DIR+、VCC | 24V |
| 拨码脉冲 | 1600 |
| 拨码电流 | 1.2 |
| FX5U PLC |
|
| PUL- | Y0 |
| DIR- | Y4 |
| X2 |
左限位 |
| X3 |
原点 |
| X4 |
右限位 |

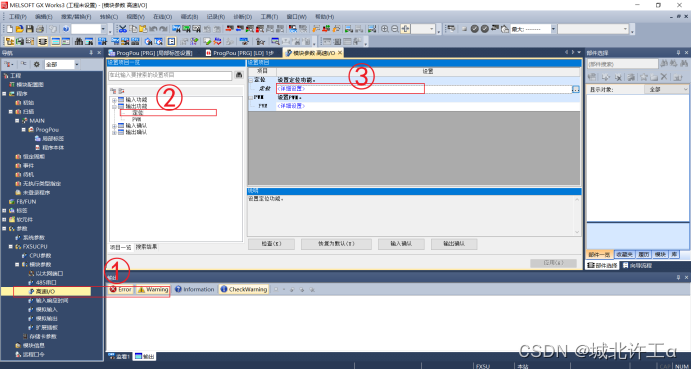
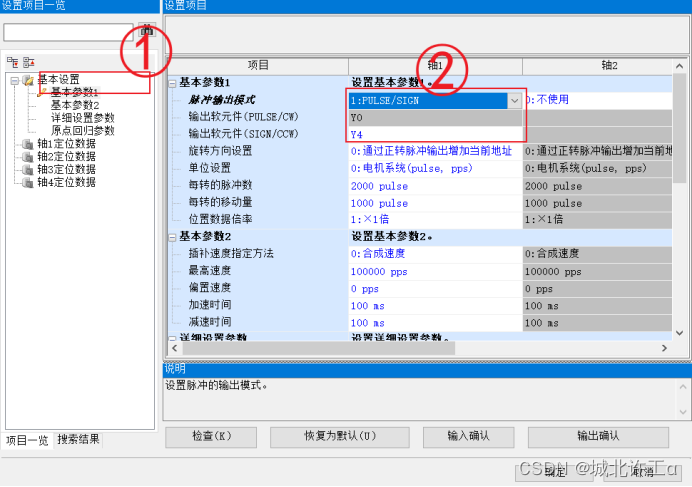
二、脉冲输出控制
1.设置参数
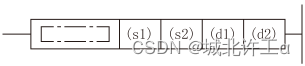
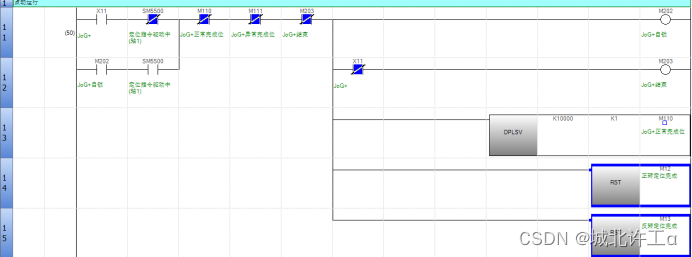
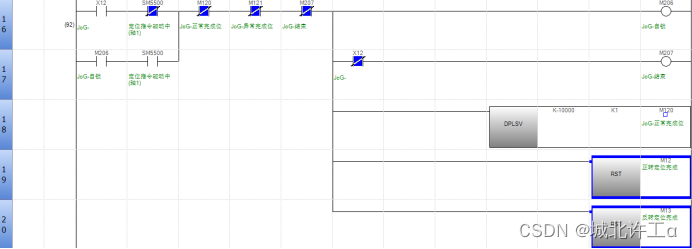
2.变速脉冲输出DPLSY指令

- (s)代表频率
- (n)代表脉冲数
- (d)代表轴编号(K1~K4)
3.程序编写

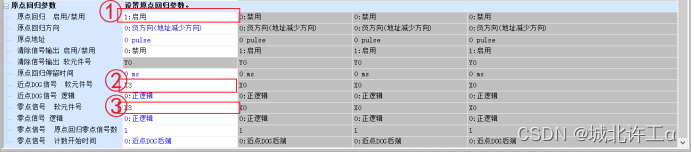
三、回原点控制
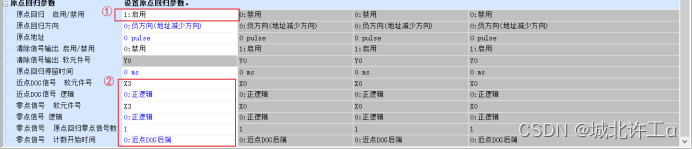
1.设置参数
2.回原点DSZR指令
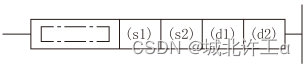
- 在(s1)中指定用户单位的原点复位速度。
- 在(s2)中指定用户单位的蠕变速率。
- 在(d1)中指定进行原点复位的轴编号。
- 在(d2)中指定原点复位结束、异常结束标志的位软元件。

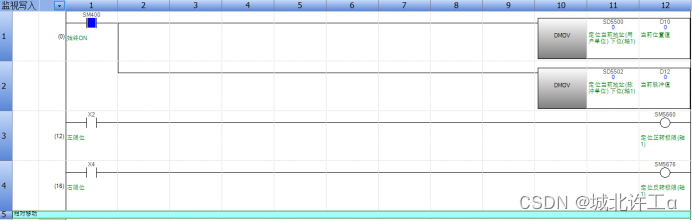
3.程序编写

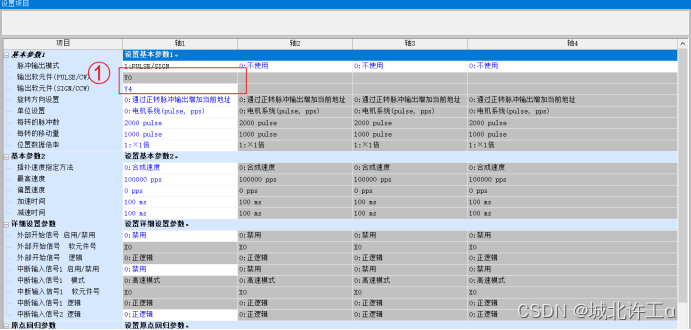
四、相对定位控制
1.设置参数
2. 相对定位DDRVI指令
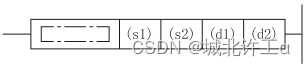
- 在(s1)中以相对地址指定用户单位的定位地址。
- 在(s2)中指定用户单位的指令速度。
- 在(d1)中指定输出脉冲的软元件。
- 在(d2)中指定输出旋转方向信号的位软元件。
3.程序编写
五、绝对定位控制
1.参数设置
2.绝对定位DDRVA指令
- 在(s1)中以相对地址指定用户单位的定位地址。
- 在(s2)中指定用户单位的指令速度。
- 在(d1)中指定输出脉冲的轴编号。
- 在(d2)中指定DDRVA指令的正常结束、异常结束标志的位软元件。
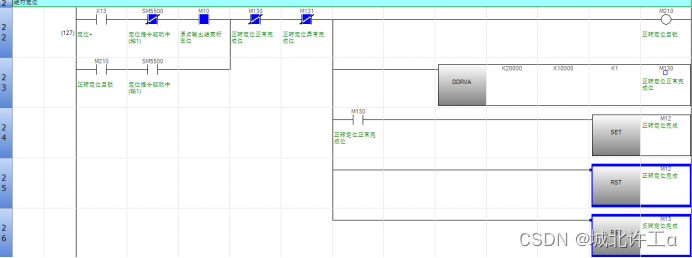
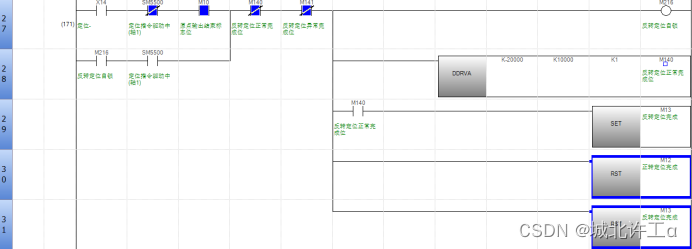
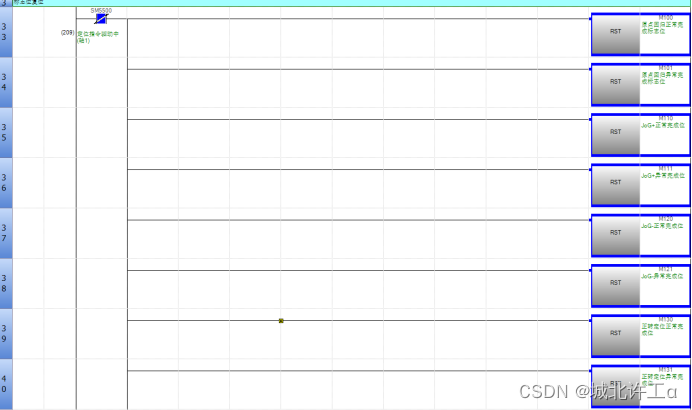
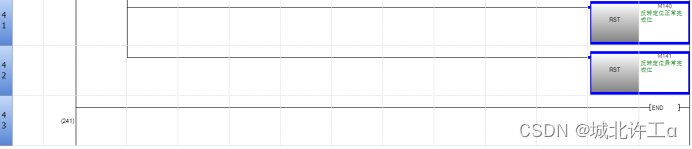
3.程序编写
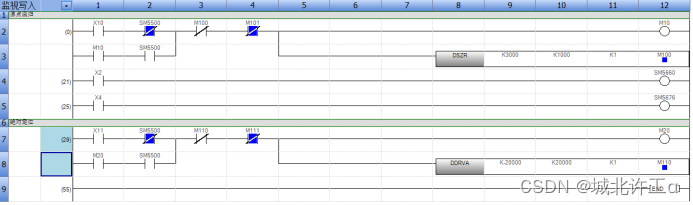
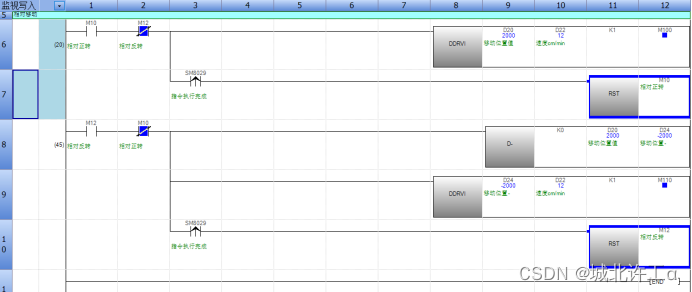
六、FX5U运动控制综合程序案例
参数设置同绝对定位一致
程序编写
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/22388.html