
<p style="margin-left:0;">使用自动调谐可以提升控制性能。许多控制器的调谐不当,可能导致一些控制器过于积极,而另一些控制器则反应迟缓。当无法确知过程动态或扰动时,PID 控制器的调谐会变得困难,这时可以使用自动调谐。</p> 讯享网
在开始自动调谐之前,需先建立稳定的控制器,即便无法自行完全正确地调谐控制器,也应确保控制器稳定,以便自动调谐能更有效地进行。
图 2-2 说明了透过设定点中继实验启动的自动调谐程序,该程序将中继器和额外的回馈讯号连接至设定点。注意,PID 自动调谐 VI 直接实现了此过程,且现有的控制器保持在控制回路中。
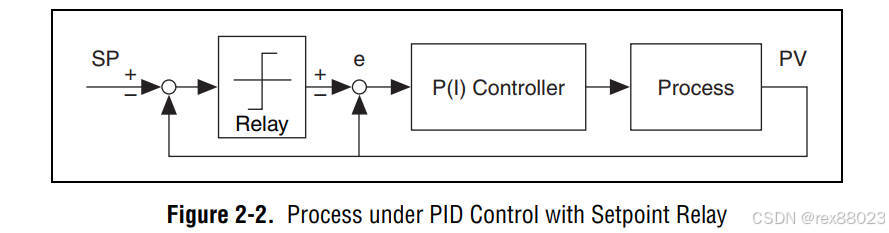
图 2-2:使用设定点中继的 PID 控制过程
对于大多数系统,非线性中继特性会产生一个极限循环,自动调谐算法可以从中识别出 PID 调谐所需的相关讯息。若现有控制器仅为比例控制,自动调谐算法将识别出最终增益 Ku 和最终周期 Tu。如果现有模型是 PI 或 PID 控制,自动调谐算法会识别延迟时间和时间常数 Tp,这是积分加延迟时间模型中的两个参数。

调谐公式
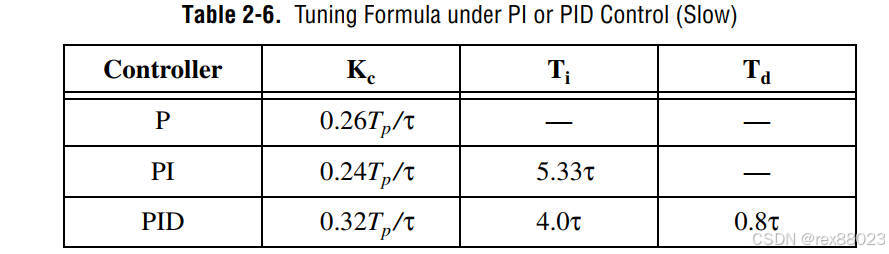
LabVIEW 的 PID 和模糊逻辑工具包使用 Ziegler 和 Nichols 的启发式方法来确定 PID 控制器的参数。在自动调谐时,可选择以下三种类型的回路性能:快速(1⁄4 阻尼比)、正常(带有一些超调)和缓慢(几乎无超调)。每种类型的回路性能对应的调谐公式参见下表。
表 2-1:仅比例控制的调谐公式(快速)
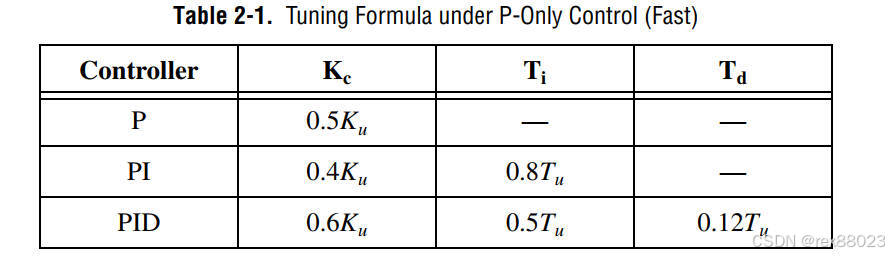
表 2-2:仅比例控制的调谐公式(正常)
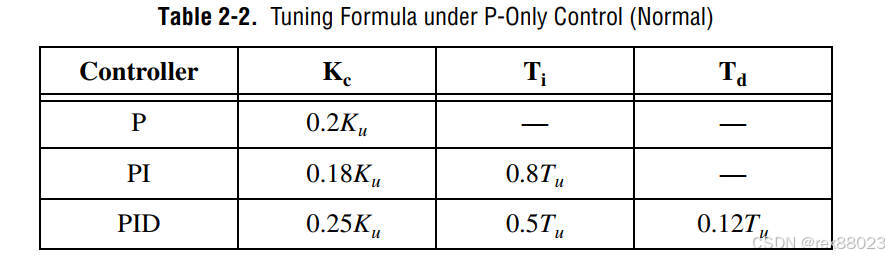
表 2-3:仅比例控制的调谐公式(缓慢)
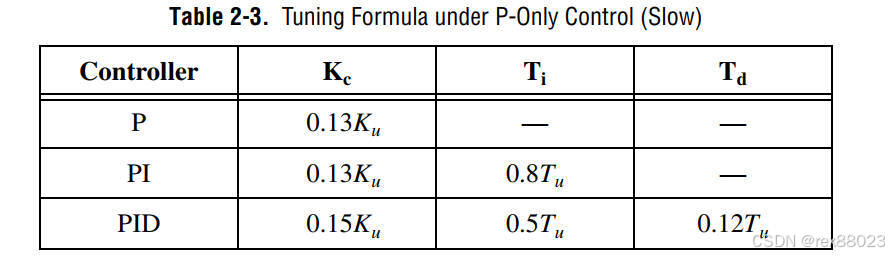
表 2-4:PI 或 PID 控制的调谐公式(快速)
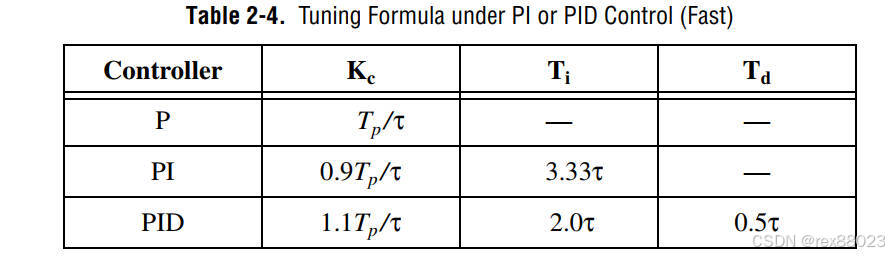
表 2-5:PI 或 PID 控制的调谐公式(正常)
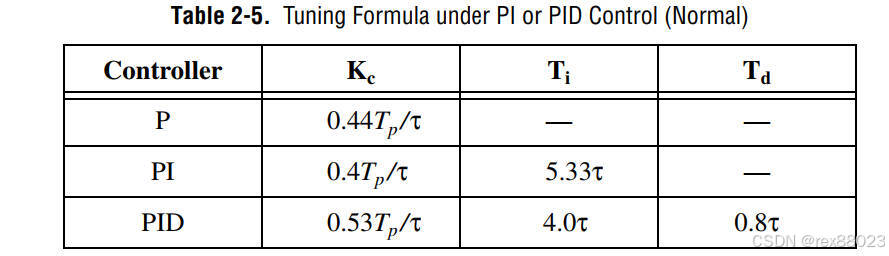
表 2-6:PI 或 PID 控制的调谐公式(缓慢)
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/156036.html