
前面我们给大家介绍了使用OpenCV以及ONNX工具包实现yolov5在LabVIEW中的部署,有英伟达显卡的朋友们可能已经感受过使用cuda加速时yolov5的速度,今天主要和大家分享在LabVIEW中使用纯TensoRT工具包快速部署并实现yolov5的物体识别, 本博客中使用的智能工具包可到主页置顶博客[https://blog.csdn.net/virobotics/article/details/]
中安装 。若配置运行过程中遇到困难,欢迎大家评论区留言,博主将尽力解决。
以下是YOLOv5的相关笔记总结,希望对大家有所帮助。
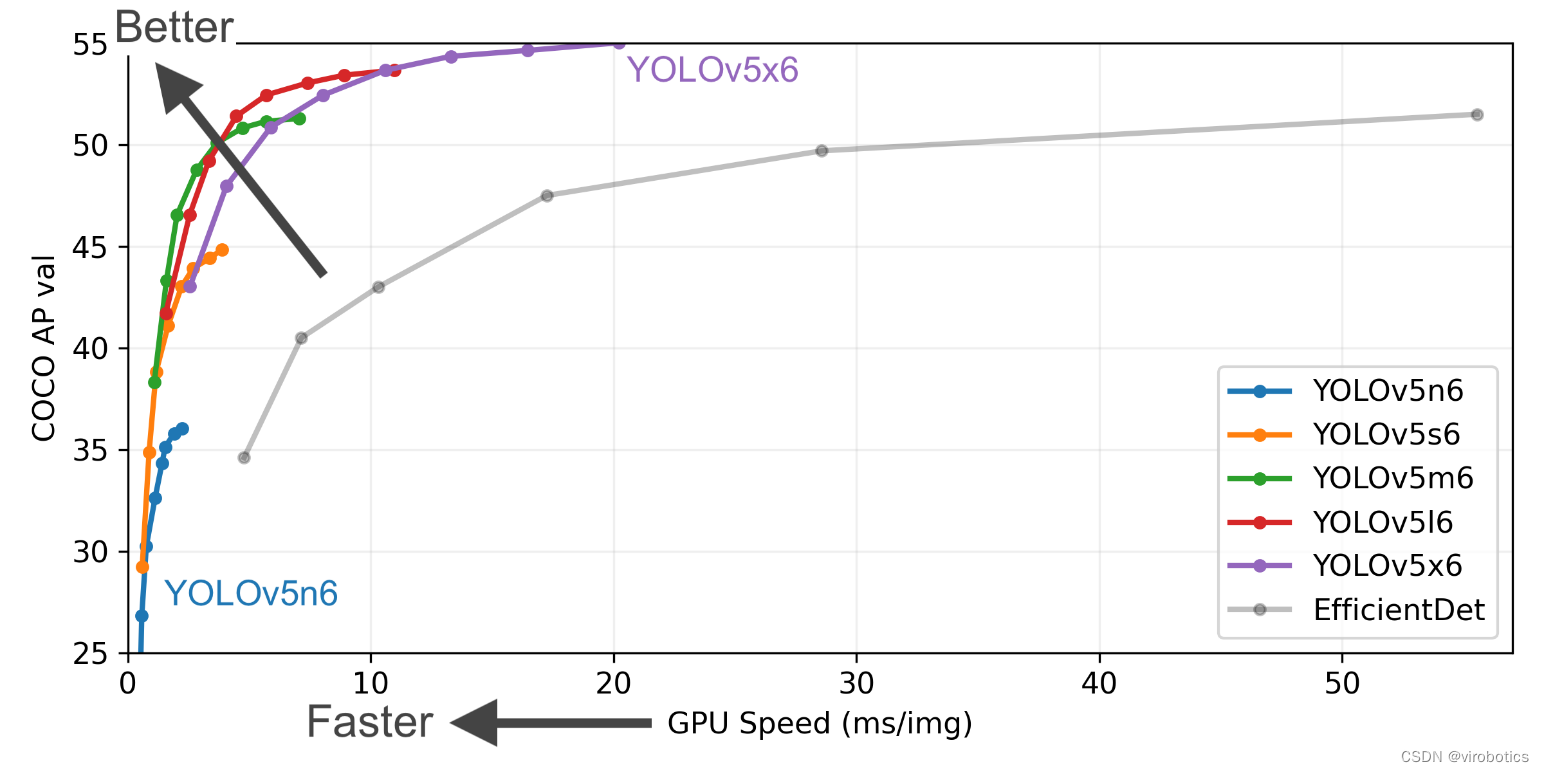
YOLOv5是在 COCO 数据集上预训练的一系列对象检测架构和模型。表现要优于谷歌开源的目标检测框架 EfficientDet,在检测精度和速度上相比yolov4都有较大的提高。本博客,我们以YOLOv5 6.1版本来介绍相关的部署开发。
讯享网
YOLOv5相比于前面yolo模型的主要特点是:
1、小目标的检测精度上有明显的提高;
2、能自适应锚框计算
3、具有数据增强功能,随机缩放,裁剪,拼接等功能
4、灵活性极高、速度超快,模型超小、在模型的快速部署上具有极强优势
关于YOLOv5的网络结构解释网上有很多,这里就不再赘述了,大家可以看其他大神对于YOLOv5网络结构的解析。
为方便使用, 博主已经将yolov5模型转化为onnx格式 ,可在百度网盘下载
链接:[https://pan.baidu.com/s/15dwoBM4W-5_nlRj4G9EhRg?pwd=yiku]
提取码:yiku
将Ultralytics开源的YOLOv5代码Clone或下载到本地,可以直接点击Download ZIP进行下载,
下载地址:[https://github.com/ultralytics/yolov5]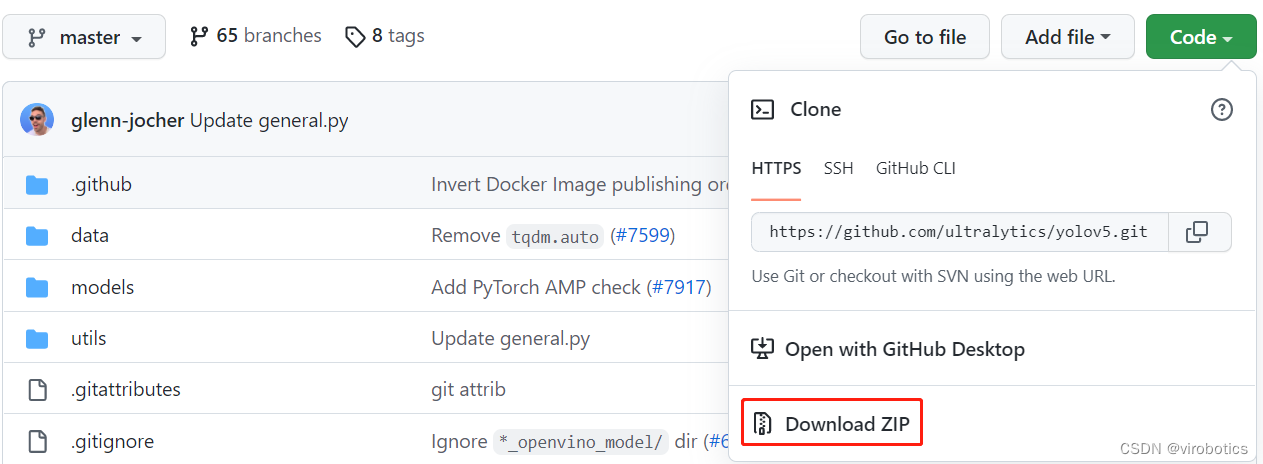
解压刚刚下载的zip文件,然后安装yolov5需要的模块,记住cmd的工作路径要在yolov5文件夹下:
打开cmd切换路径到yolov5文件夹下,并输入如下指令,安装yolov5需要的模块
讯享网
打开cmd,进入python环境,使用如下指令下载预训练模型:
讯享网
成功下载后如下图所示: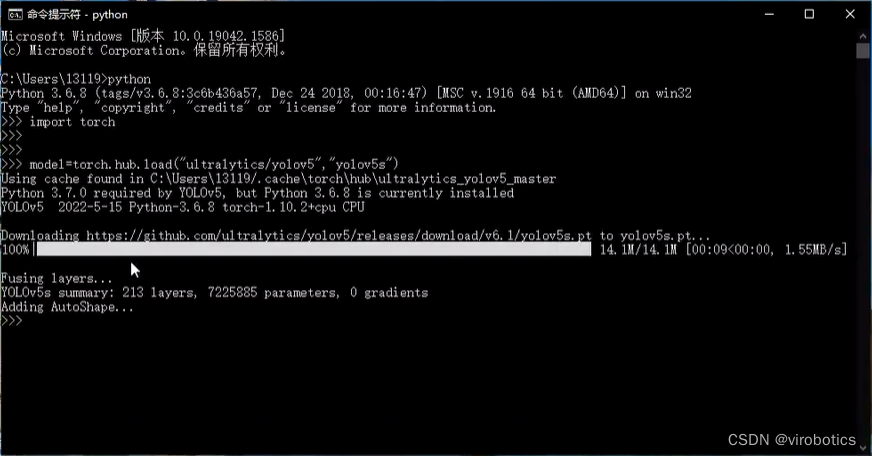
将.pt文件转化为.onnx文件,在cmd中输入转onnx的命令(记得将export.py和pt模型放在同一路径下):
如下图所示为转化成功界面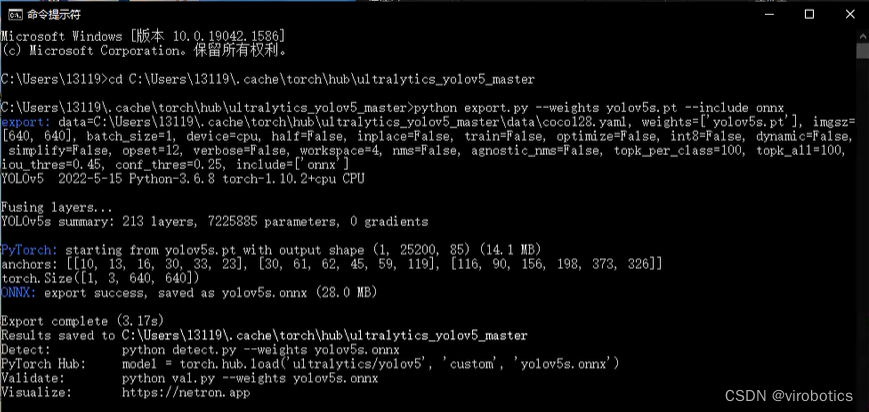
其中yolov5s可替换为yolov5myolov5myolov5lyolov5x
如需要查看TensorRT工具包相关vi含义,可查看:[https://blog.csdn.net/virobotics/article/details/]
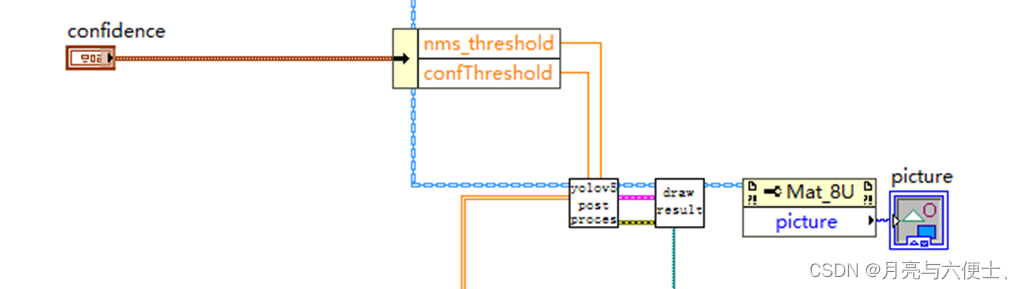
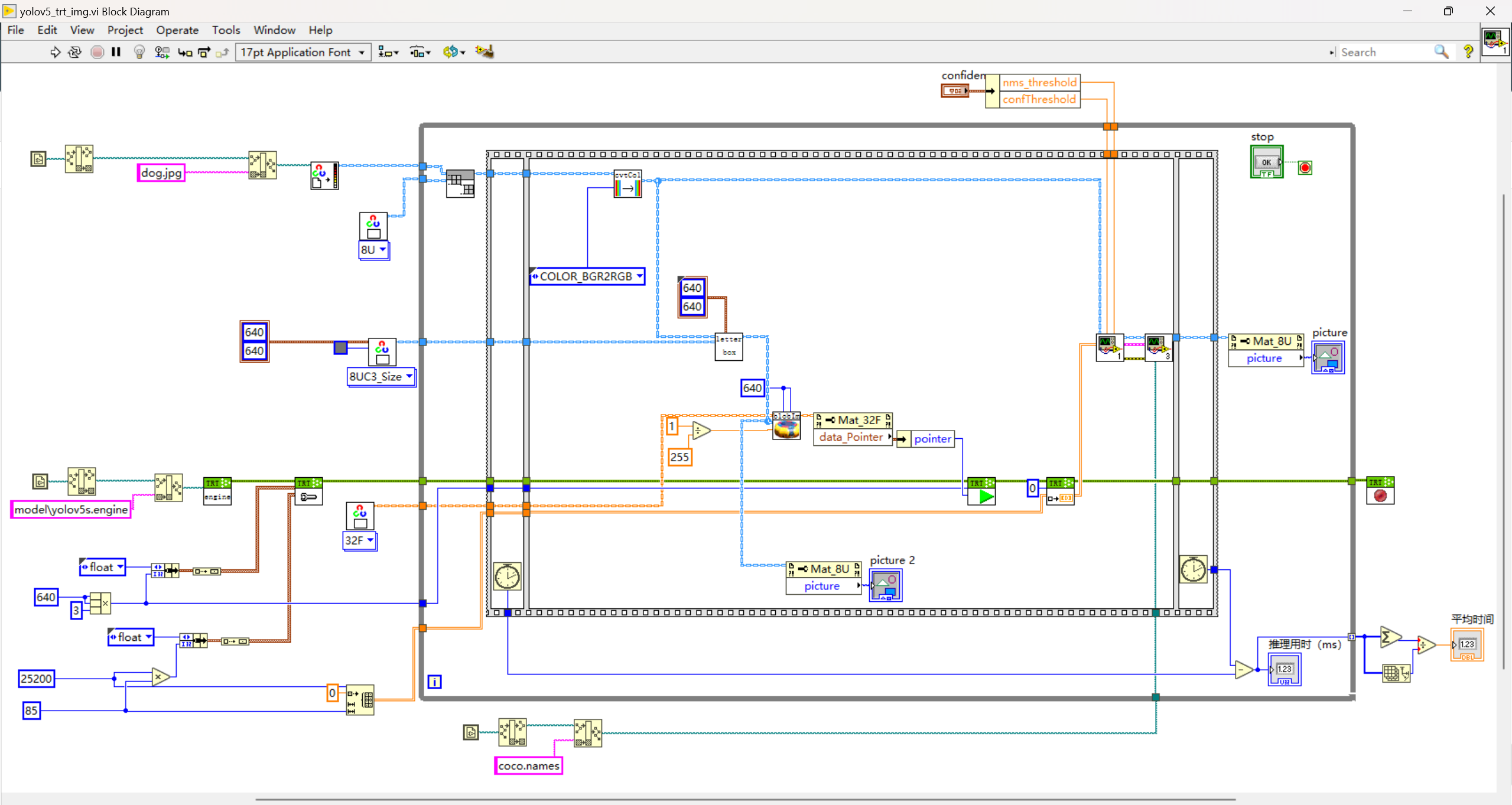
使用onnx_to_engine.vi,将该vi拖拽至前面板空白区域,创建并输入onnx的路径以及engine的路径,type即精度,可选择FP32或FP16,肉眼观看精度无大差别。(一般FP16模型比FP32速度快一倍)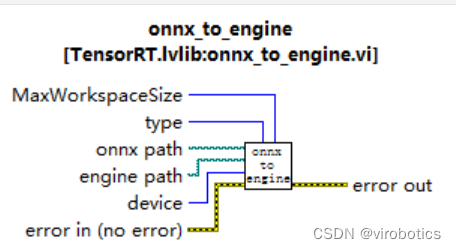
转换的完整程序如下: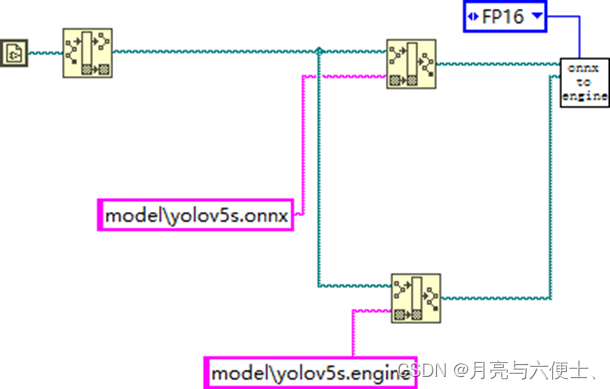
点击运行,等待1~3分钟,模型转换成功,可在刚刚设定的路径中找到我们转化好的mobilenet.engine.
Q:为什么要转换模型,不直接调用ONNX?> A:tensorRT内部加载ONNX后其实是做了一个转换模型的工作,该过程时间长、占用内存巨大。因此不推荐每次初始化都加载ONNX模型,而是加载engine。
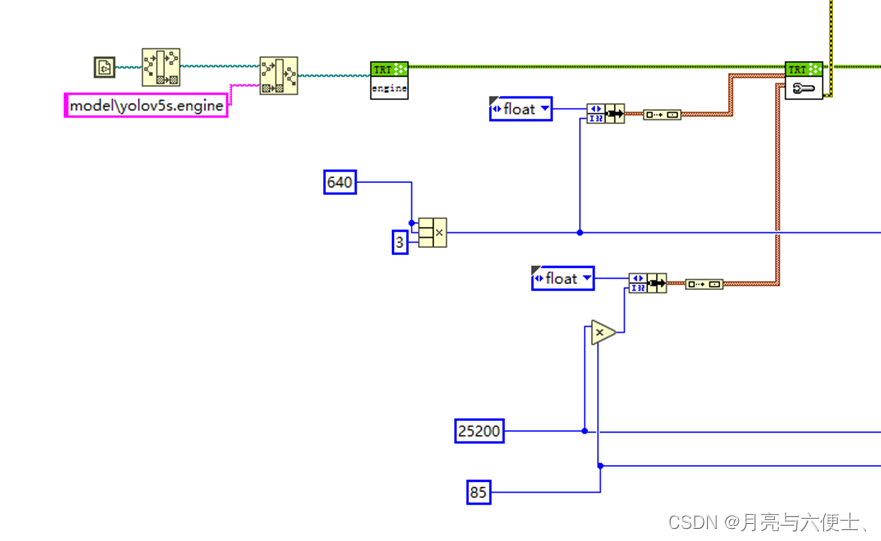
- 加载yolov5s.engine文件
- 设置输入输出缓存
• 输入大小为13640640
• 输出大小为125200*85
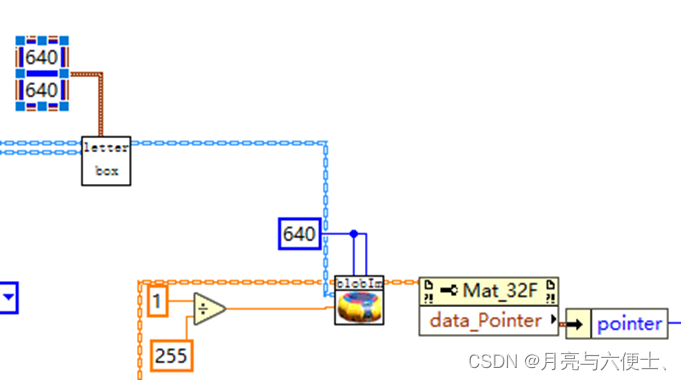
- LetterBox
- blobFromImage,包含如下步骤:
讯享网

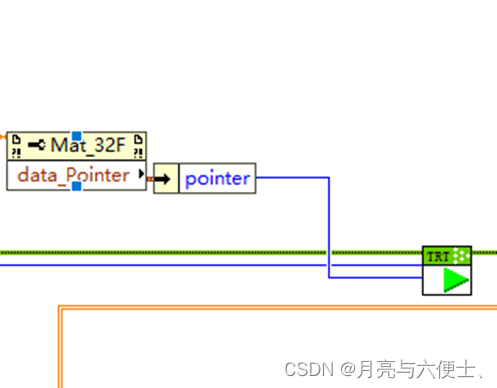
- 推荐使用数据指针作为输入给到run.vi
- 数据的大小为13640*640
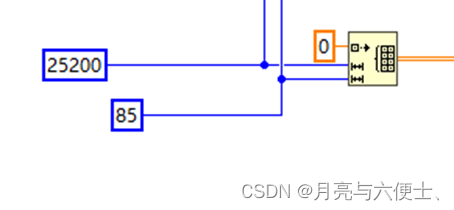
- 循环外初始化一个25200*85的二维数组
- 此数组作为Get_Result的输入,另一个输入为index=0
- 输出为25200*85的二维数组结果
本范例中,后处理方式和使用onnx一样
源码下载链接:https://pan.baidu.com/s/1y0scJ8tg5nzjJK4iPvNwNQ?pwd=yiku
- 操作系统:Windows10
- python:3.6及以上
- LabVIEW:2018及以上 64位版本
- 视觉工具包:techforce_lib_opencv_cpu-1.0.0.98.vip
- LabVIEW TensorRT工具包:virobotics_lib_tensorrt-1.0.0.22.vip
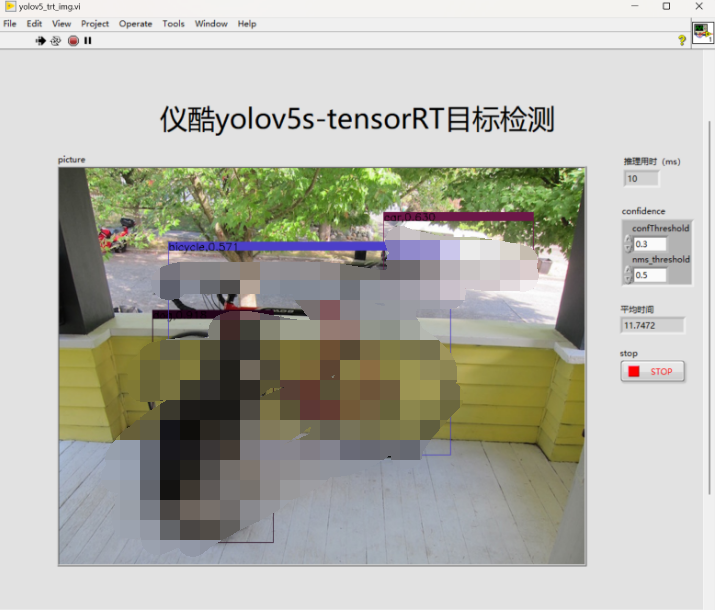
- 运行结果所用显卡:RTX3060
审核编辑 黄宇
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/155937.html