
用照片进行三维模型重建

裙子的建模要更复杂一些:
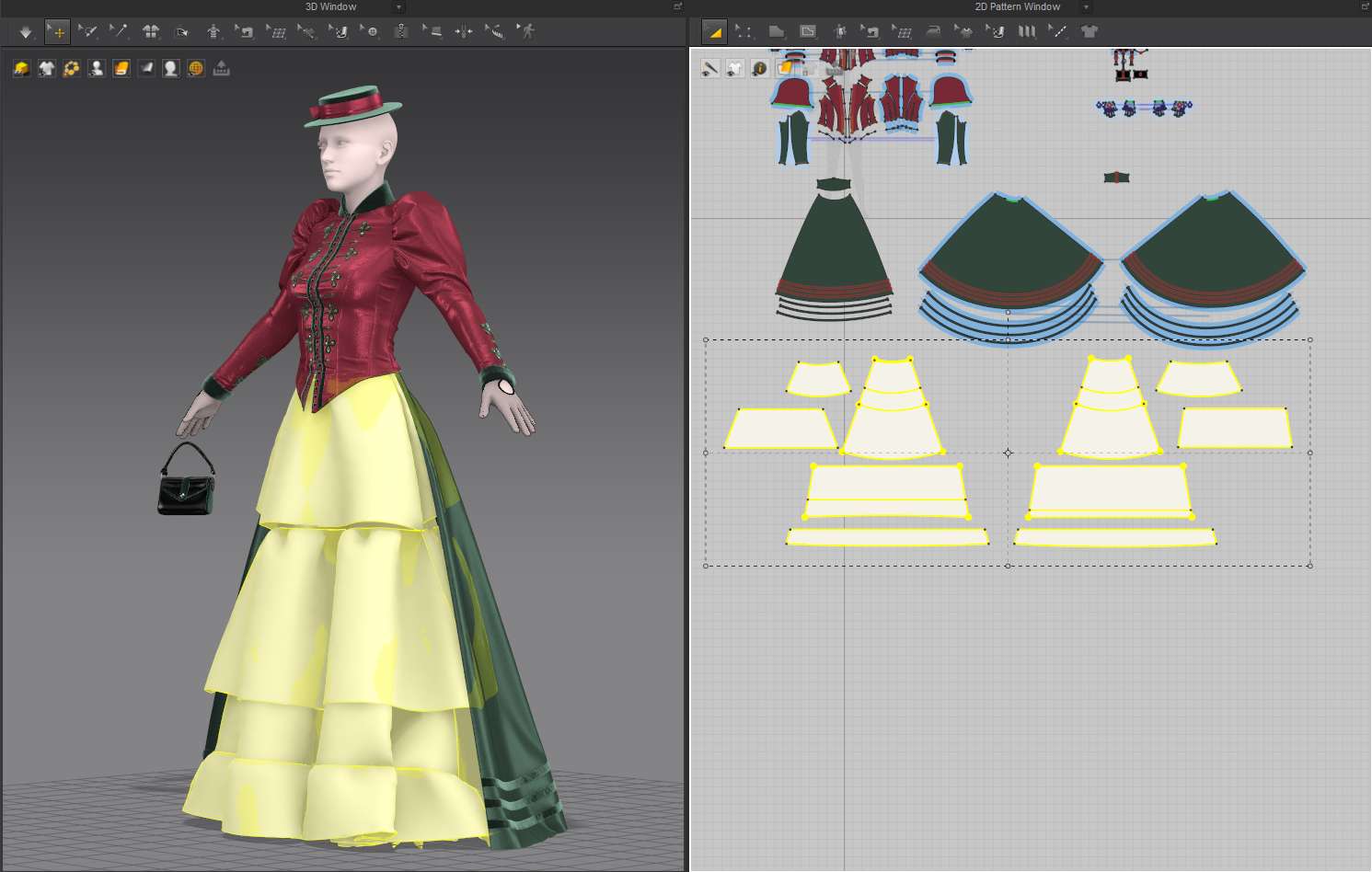
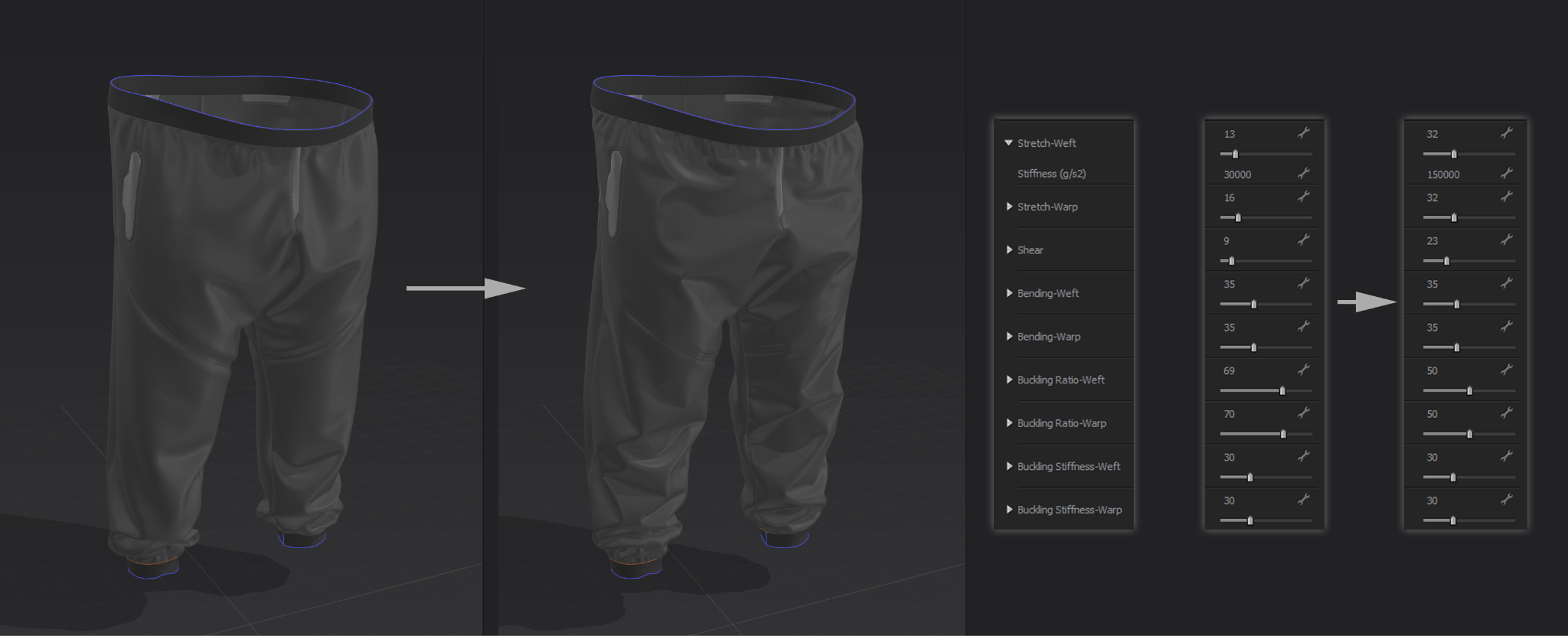
虽然据说3D建模的工具比原画稍好一点点,但是也是需要美术功底的,还需要耐心。
要想低成本制作3D模型,我们的思路还是利用图像算法和深度学习来进行三维重建。
SfM的原理与应用
传统的图像方法是基于多视觉几何原理,从运动中实现3D重建。其基本方法叫作Structure-from-Motion,简称SfM,它通过无时间序列的一系列2D图像来计算三维信息。
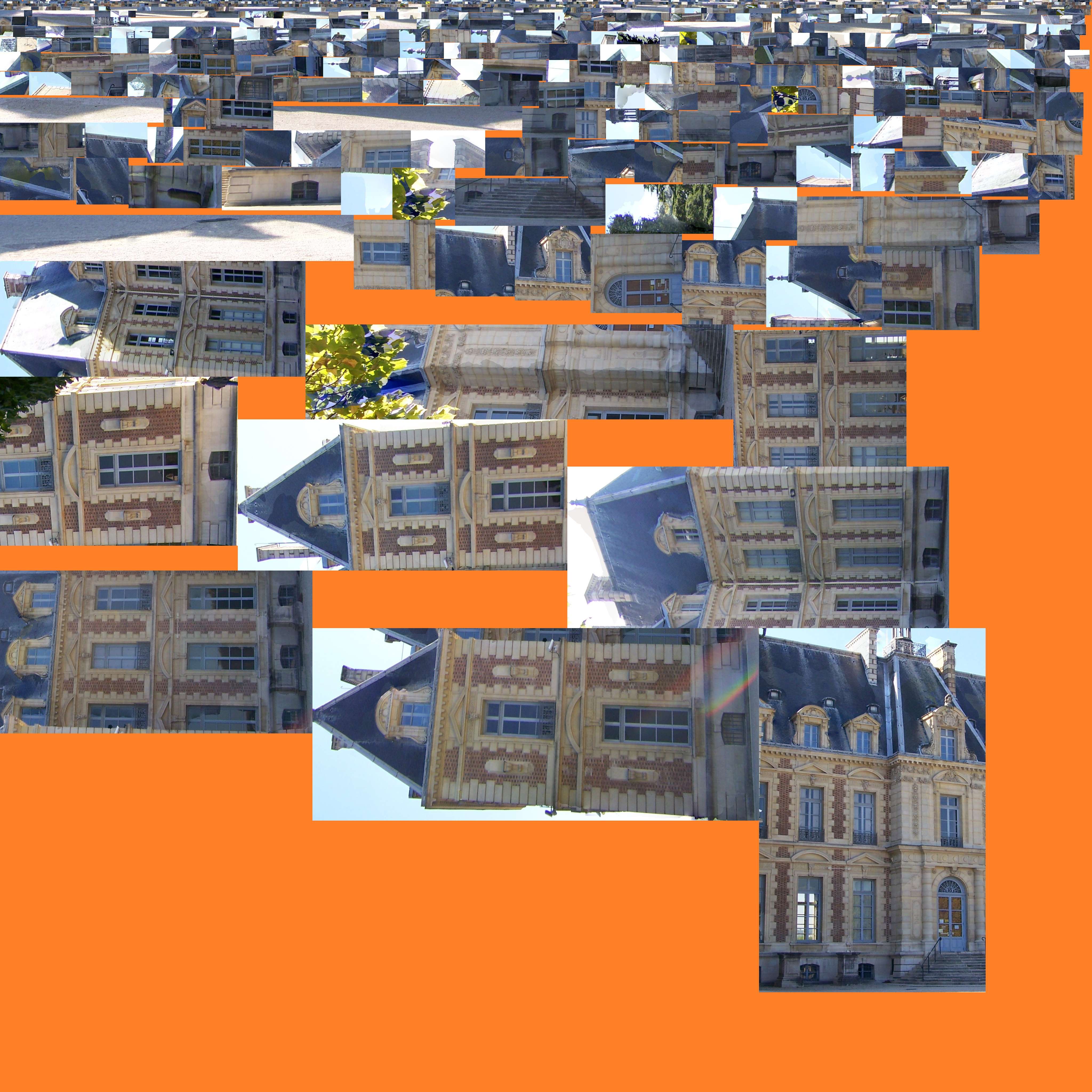
大致的流程如下图所示:
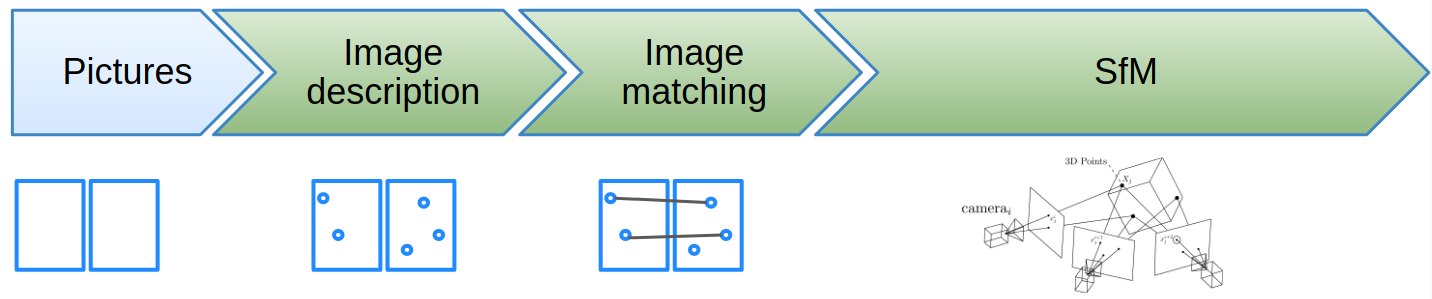
图像首先经过解析,然后进行比对,最后通过SfM算法形成一个点云。
openMVG 多视图几何库
我们概念少讲,直接上手实战。我们使用openMVG多视图几何库来使用SfM算法。MVG是Multiple View Geometry的缩写,就是多视图几何。
首先我们要编译openMVG的库。建议使用Ubuntu 18.04系统。
首先我们要编译一个线性代数库eigen。这个是openMVG的外部依赖,还不能通过apt install来安装。
sudo apt -y install git cmake libpng-dev libjpeg-dev libtiff-dev libglu1-mesa-dev sudo apt -y install libboost-iostreams-dev libboost-program-options-dev libboost-system-dev libboost-serialization-dev git clone https://gitlab.com/libeigen/eigen.git --branch 3.4 mkdir eigen_build && cd eigen_build cmake ../eigen make && sudo make install 讯享网
下面编译安装openMVG库本身:
- 安装一堆图形库:
sudo apt install libpng-dev libjpeg-dev libtiff-dev libxxf86vm1 libxxf86vm-dev libxi-dev libxrandr-dev - 安装graphviz:
sudo apt install graphviz - 下载openMVG代码:
git clone --recursive https://github.com/openMVG/openMVG.git - 创建openMVG_build目录:
mkdir openMVG_Build - 转到openMVG_build目录:
cd openMVG_Build - 生成编译配置文件:
cmake -DCMAKE_BUILD_TYPE=RELEASE ../openMVG/src/ - 编译:
make -j - 安装:
sudo make install
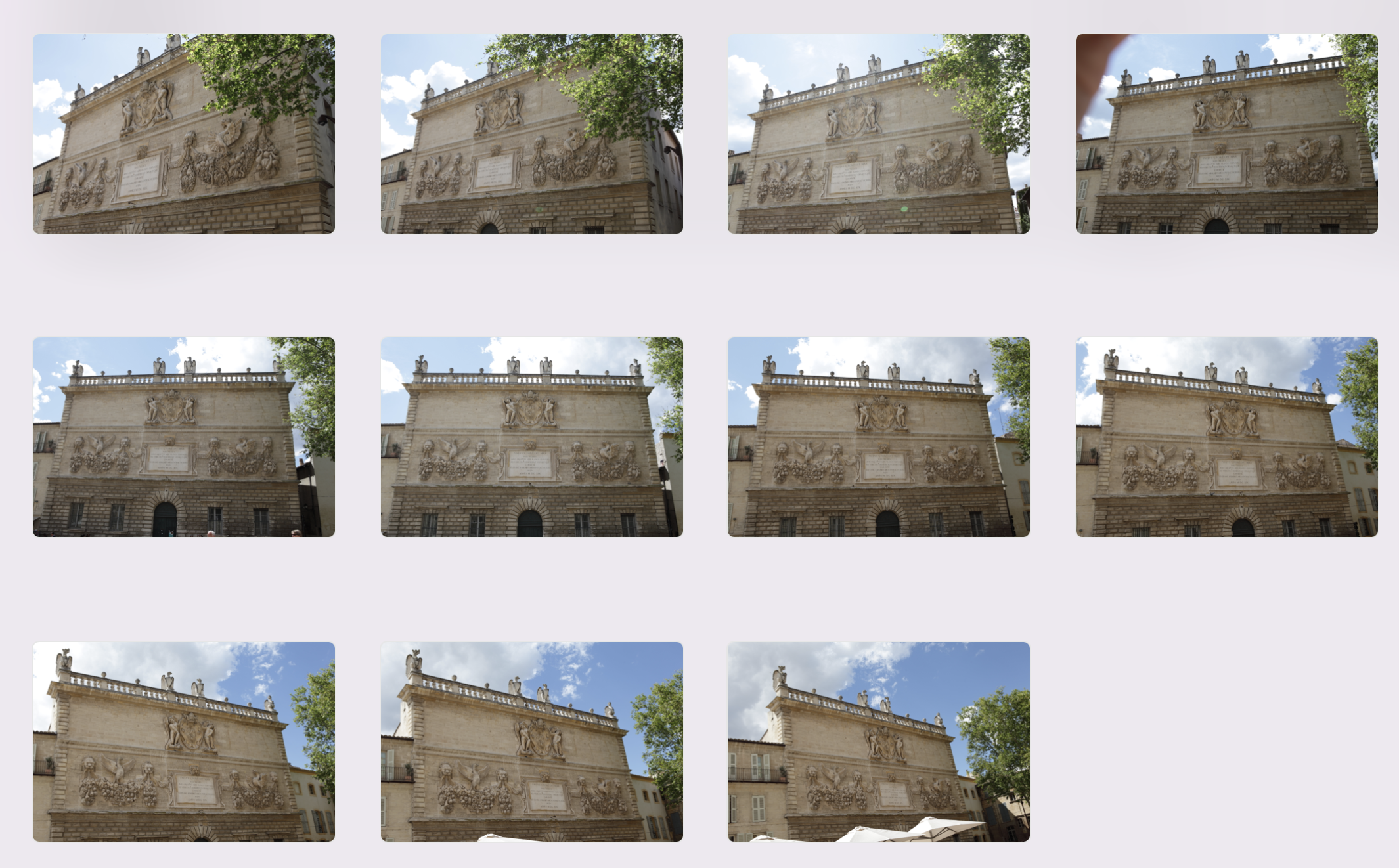
我们随便取一个,比如第一个AvignonHotelDesMonnaies,教皇城阿维尼翁的莫奈酒店。
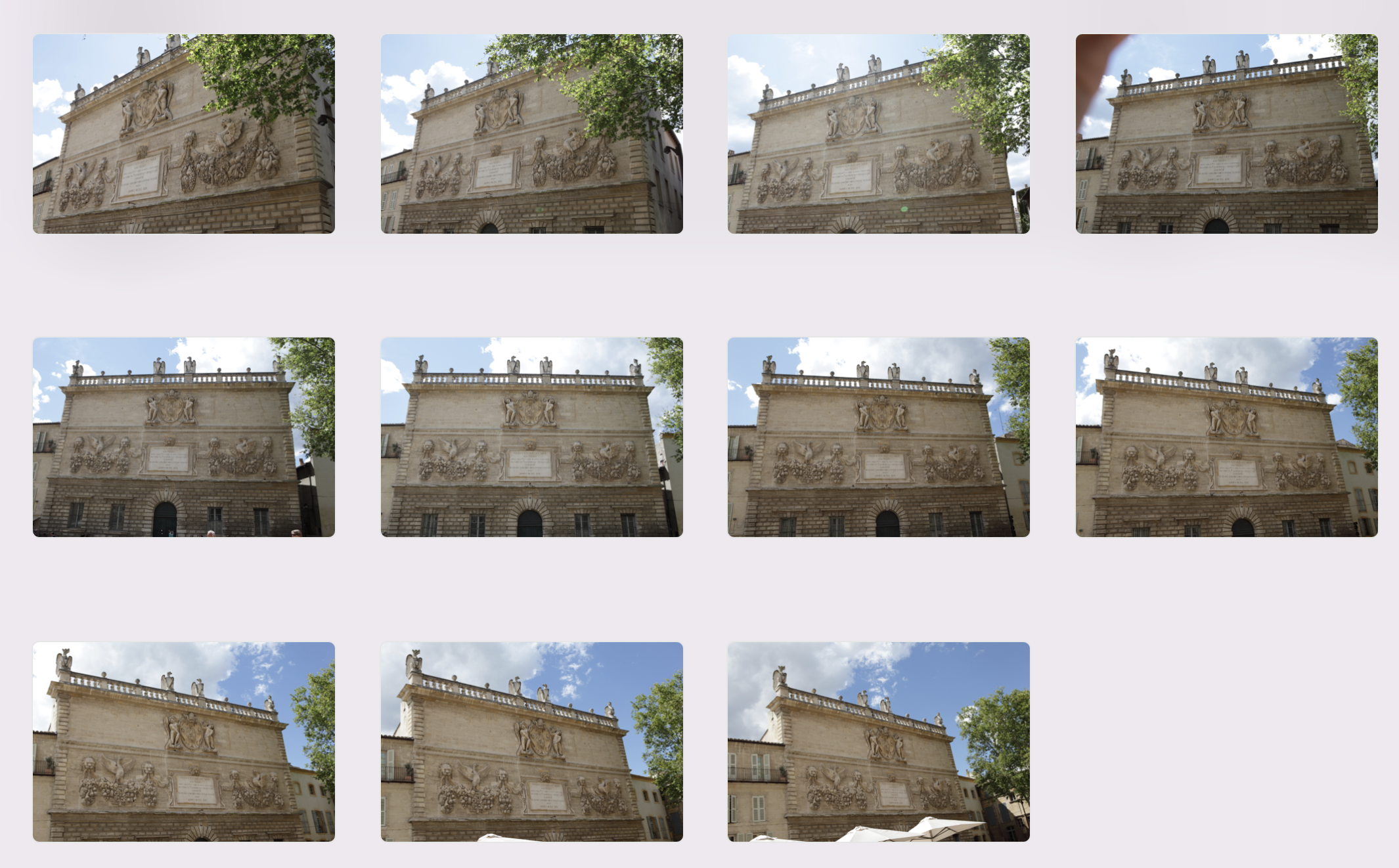
由11张照片组成。
我们在openMVG_Build/software/SfM目录下执行:
讯享网python SfM_SequentialPipeline.py ~/workspace/ReconstructionDataSet/AvignonHotelDesMonnaies/ ~/workspace/result/
然后会生成result/reconstruction_global/SfMReconstruction_Report.html这个报告文件:
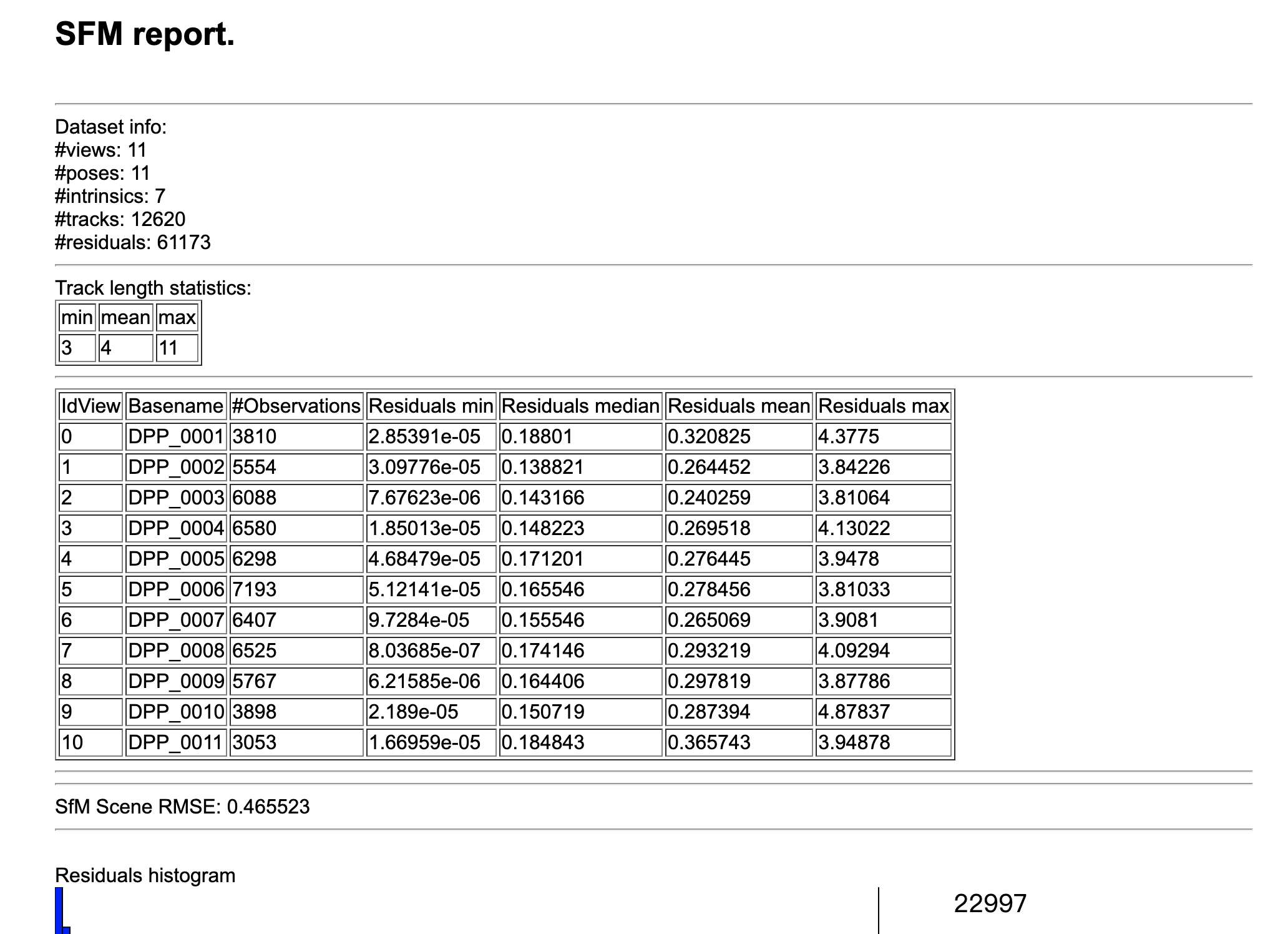
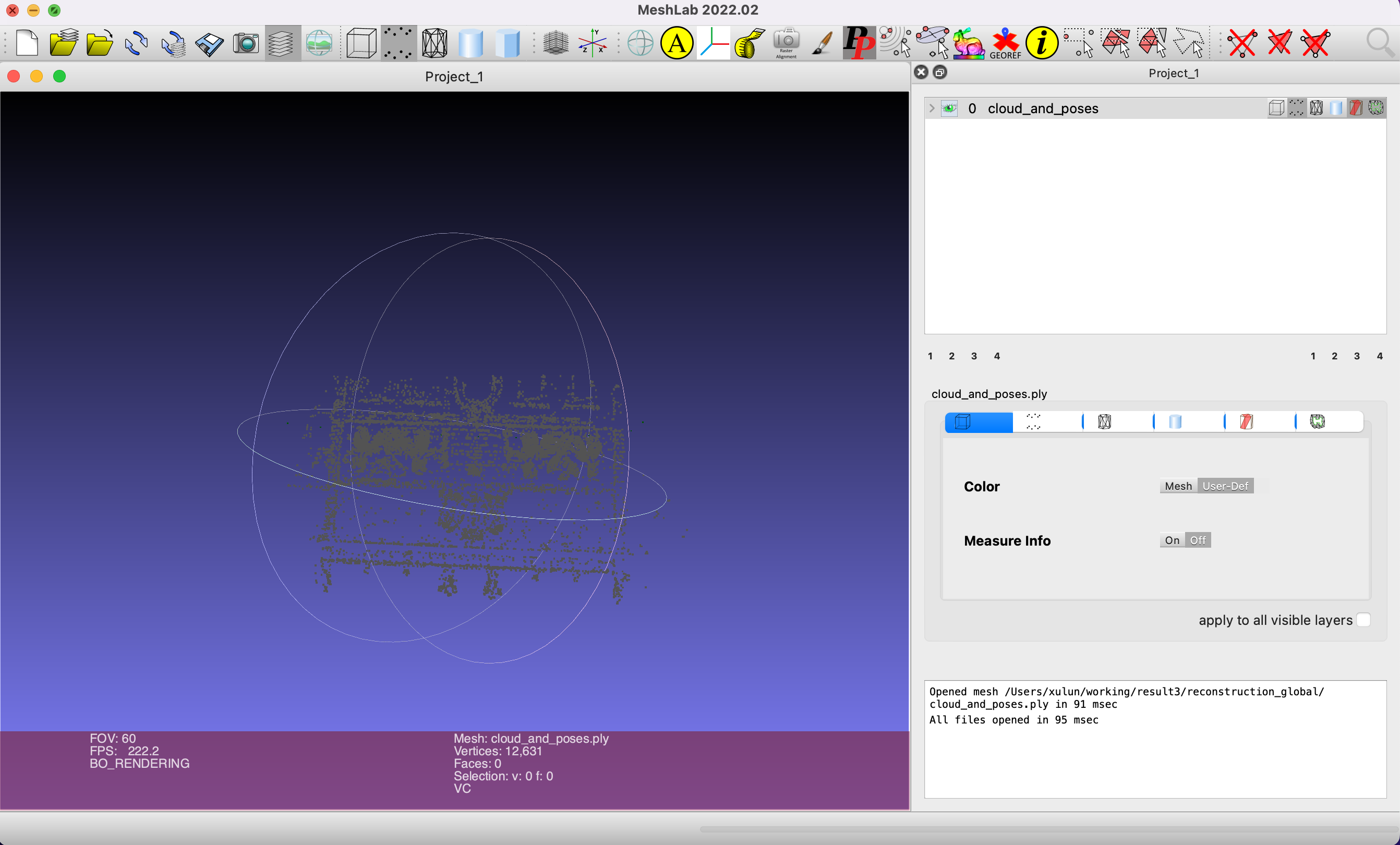
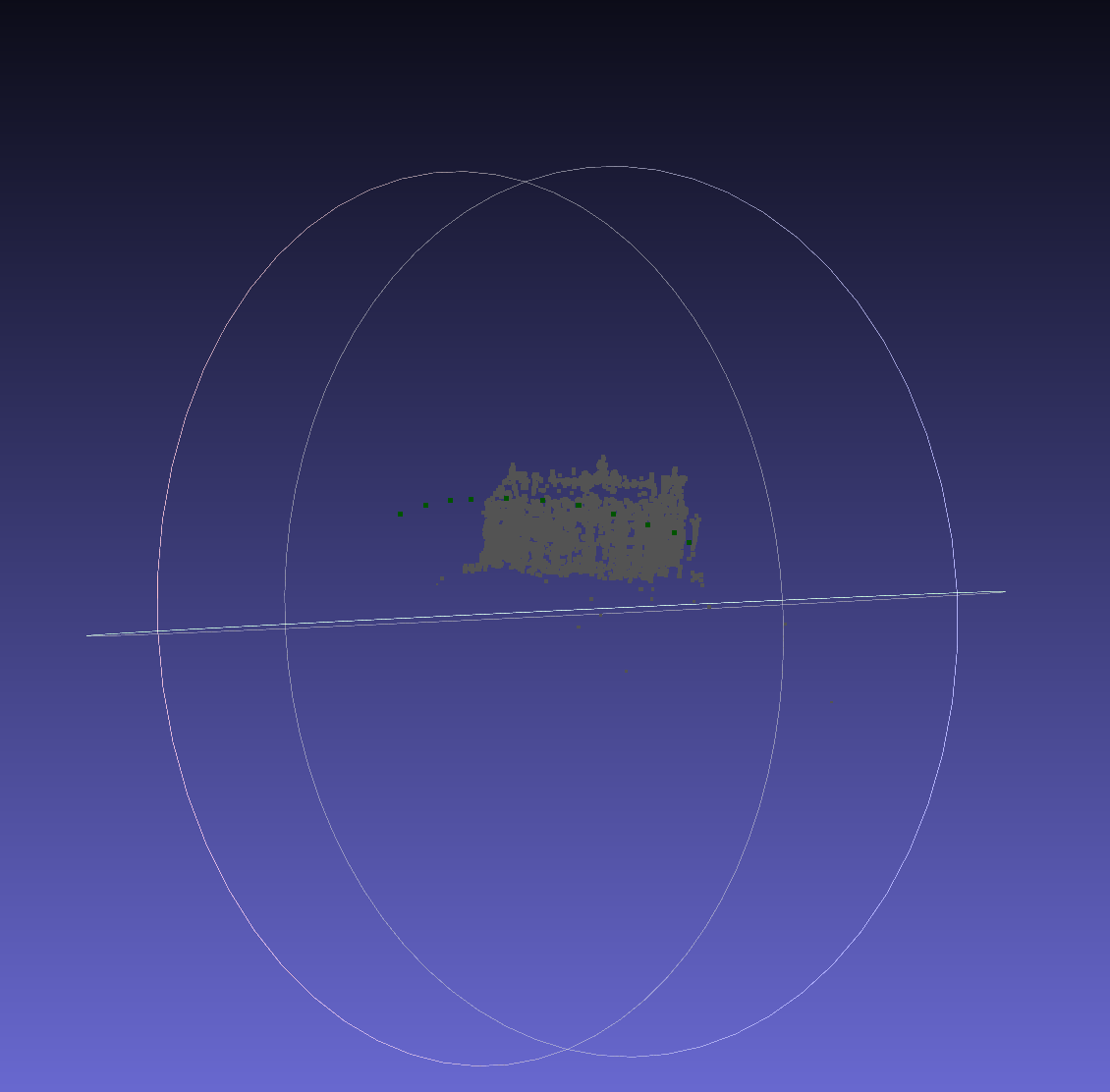
更直观的结果我们可以通过MeshLab软件打开result/reconstruction_global/cloud_and_poses.ply来查看SFM的结果。这就是传说中的点云。
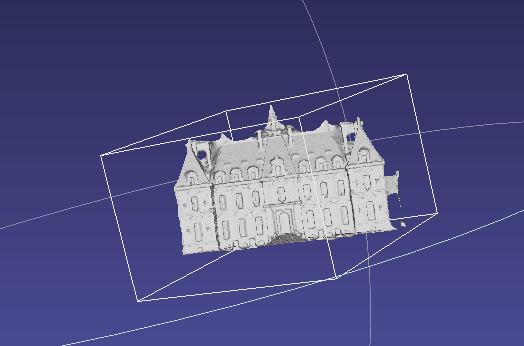
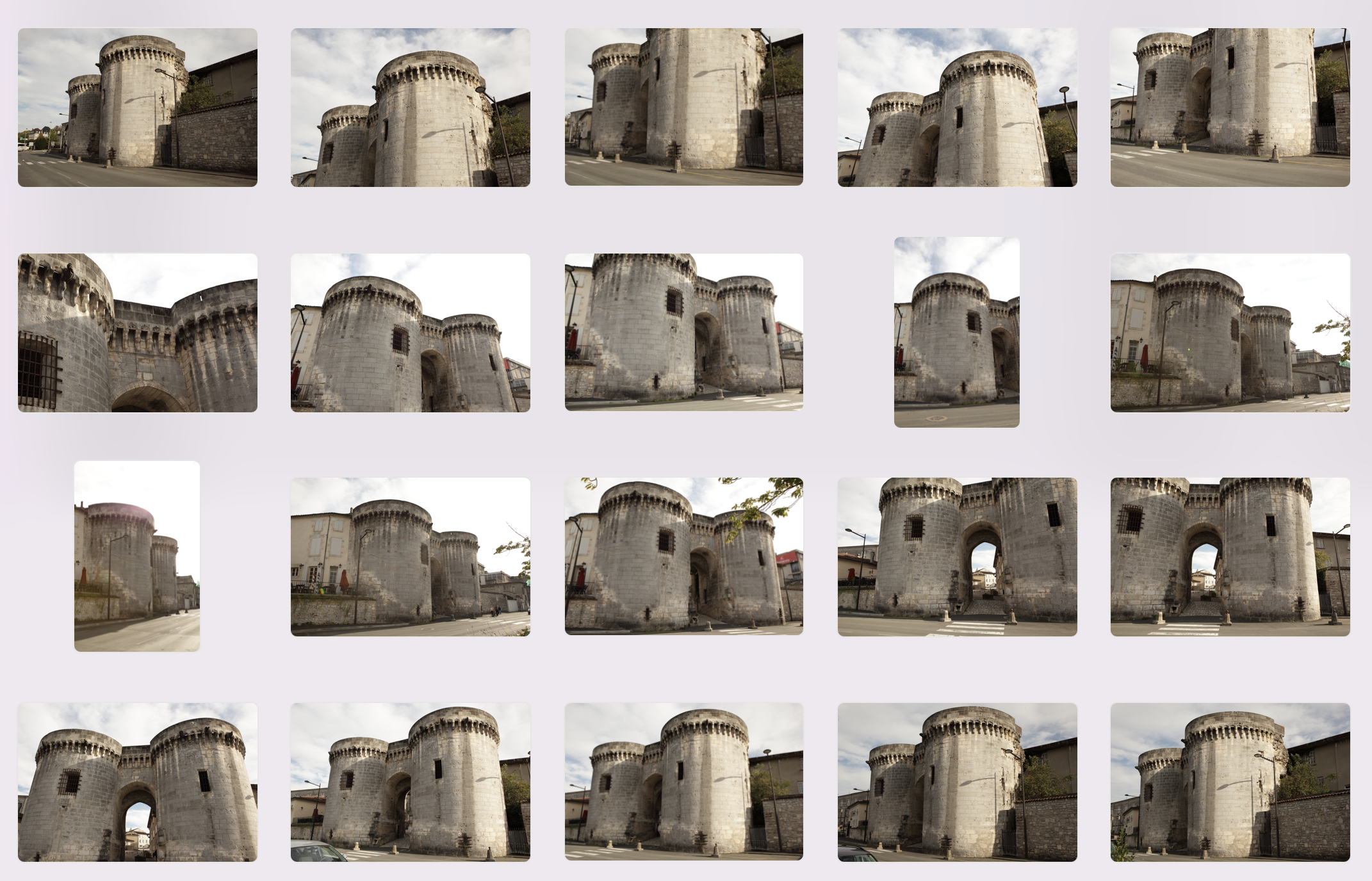
我们再换一个城堡的数据集:https://github.com/openMVG/ImageDataset_SceauxCastle

命令跟上一个一样:
python SfM_SequentialPipeline.py ~/workspace/github/ImageDataset_SceauxCastle/images/ ~/workspace/castle 点云看起来是这个样子的:
OpenMVS 从点云到模型
有了点云还不够,我们还要继续将其变成3D模型。这时候我们需要另一个库openMVS.
- 模型格式转换
上一步我们openMVG生成了一个叫sfm_data.bin的文件,我们首先将其转换成openMVS需要的格式:
讯享网openMVG_main_openMVG2openMVS -i sfm_data.bin -o scene.mvs -d scene_undistorted_images
- 重建成密集点云
通过DensifyPointCloud工具来生成密集点云:
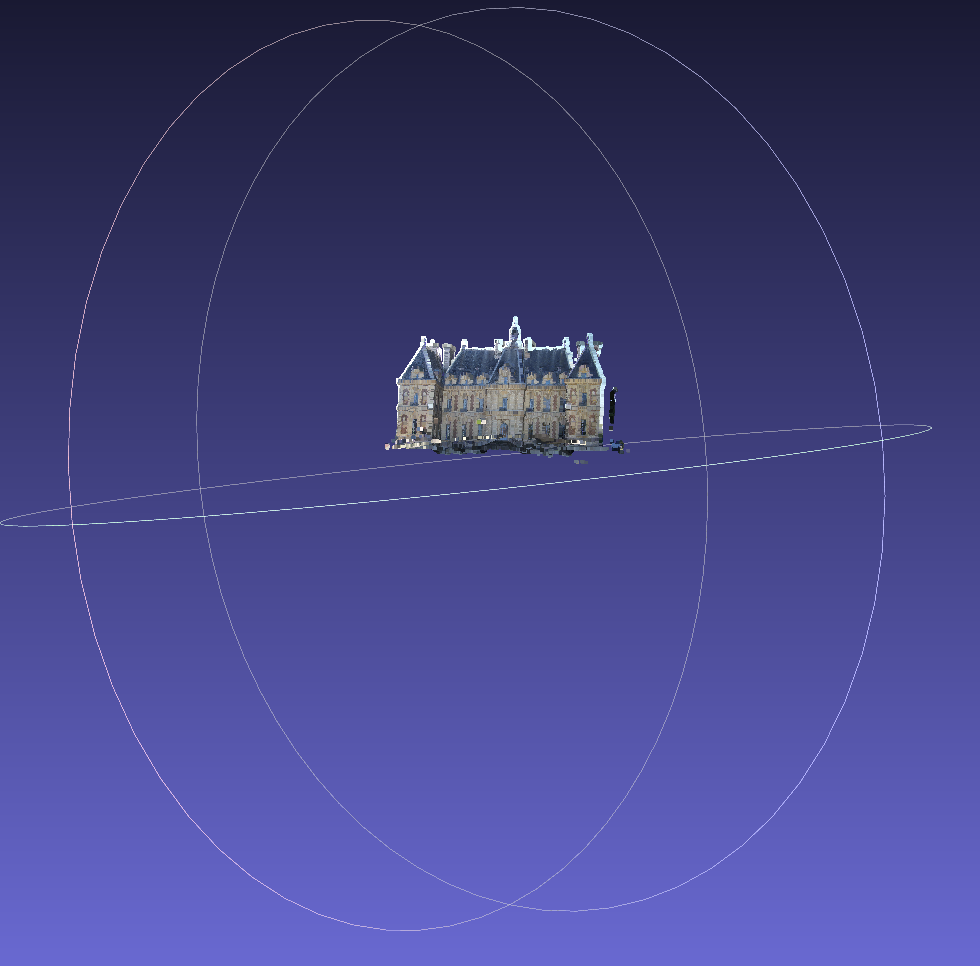
DensifyPointCloud scene.mvs 跟上面的openMVG生成的点云图一对比,是不是差别很明显呢?
- 粗网格重建
调用ReconstructMesh工具来对上一步生成的密集点云进行网格重建:
讯享网ReconstructMesh scene_dense.mvs
生成的效果如下:

- 网格细化
调用RefineMesh工具来进行网格细化:
RefineMesh scene_dense_mesh.mvs 细化之后效果如下:
- 网格纹理
最后一步,给网格加上纹理:
讯享网TextureMesh scene_dense_mesh_refine.mvs
这一步将生成scene_dense_mesh_refine_texture.glb,我们就大功告成了。
我们来看看最终生成的效果:

注意,纹理是存放在scene_dense_mesh_refine_texture.png中的,加载glb的时候要能够在同一目录下找到,否则找不
这个glb除了要引用图片做纹理之外,跟其它的没有什么不同。
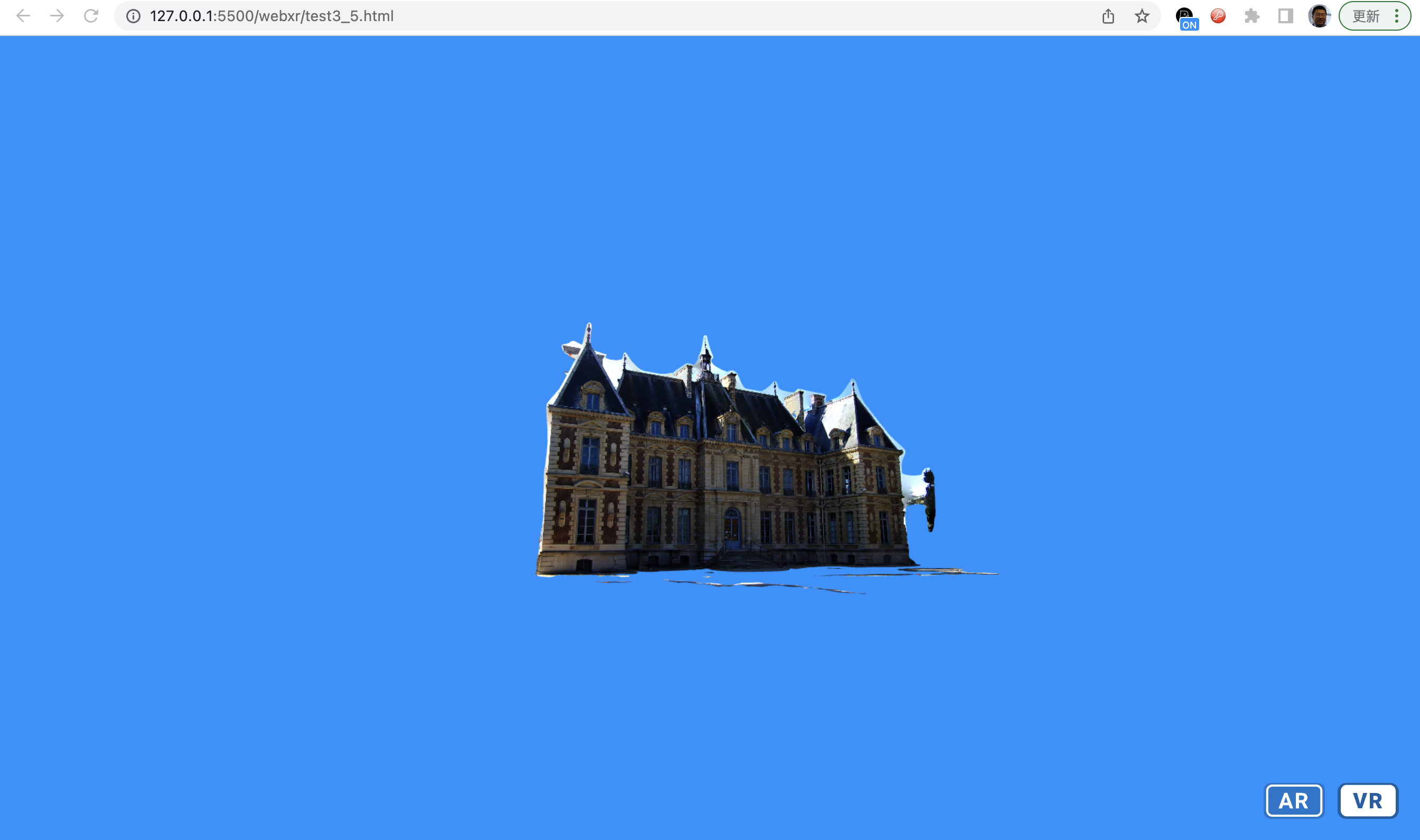
我们写个网页加载它吧:
<!DOCTYPE html> <html> <head> <script src="https://aframe.io/releases/1.3.0/aframe.min.js"></script> </head> <body> <a-scene> <a-sky color="#1890ff"></a-sky> <a-assets> <a-asset-item id="glass" src="./c.glb"></a-asset-item> </a-assets> <a-entity position="0 0 -4" scale="40.0 40.0 40.0" rotation="0 180 180" gltf-model="#glass"></a-entity> </a-scene> </body> </html> 显示出来的效果如下:
更多细节
大致的流程大家了解了之后,我们来进一步看一些细节。
openMVS库的编译
openMVS库用到的第三方库比openMVG要更多,主要有:
- Eigen
- Boost
- OpenCV
- CGAL
- VCGLib
- Ceres
- GLFW3
- 编译Eigen
首先装一系列依赖库:
讯享网sudo apt -y install git cmake libpng-dev libjpeg-dev libtiff-dev libglu1-mesa-dev
然后下载eigen的源代码,注意是在gitlab上的,github上已经不维护了。
git clone https://gitlab.com/libeigen/eigen.git --branch 3.4 接着就是cmake的标准过程了:
讯享网cd eigen mkdir build cd build cmake .. make sudo make install
- 安装Boost, OpenCV, CGAL
sudo apt -y install libboost-iostreams-dev libboost-program-options-dev libboost-system-dev libboost-serialization-dev sudo apt -y install libopencv-dev sudo apt -y install libcgal-dev libcgal-qt5-dev - 下载VCG源代码
讯享网git clone https://github.com/cdcseacave/VCG.git vcglib
最后编译时源码引入,不用编译
- 编译Ceres-solver
先安装库:
sudo apt -y install libatlas-base-dev libsuitesparse-dev sudo apt install libgflags-dev sudo apt install libgoogle-glog-dev 接着下载源代码:
讯享网git clone https://github.com/ceres-solver/ceres-solver
注意,2.1以上的版本使用了std::exclusive_scan,如果你用的gcc版本较老,比如gcc7,请checkout 2.1.0版本。
cmake编译还是老套路:
mkdir build cd build cmake .. make sudo make install - 编译openMVS
如果前面都成功了,主要是库安装都OK的话,下面就可以编译openMVS了。
讯享网git clone https://github.com/cdcseacave/openMVS.git mkdir build2 cd build2 cmake .. -DVCG_ROOT="$main_path/vcglib" make -j sudo make install
再来一遍openMVS的流程
MVG的过程其实分为7步:
- Intrinsics analysis
- Compute features
- Compute matching pairs
- Compute matches
- Filter matches
- Do Sequential/Incremental reconstruction
- Colorize Structure
其中最重要的是第一步,先会做一次预测,如果不能用的话就把相关图片排除掉。比如ReconstructionDataSet/AvignonHotelDesMonnaies 这个数据集有11张图片,经过分析后可能只有7张可用。
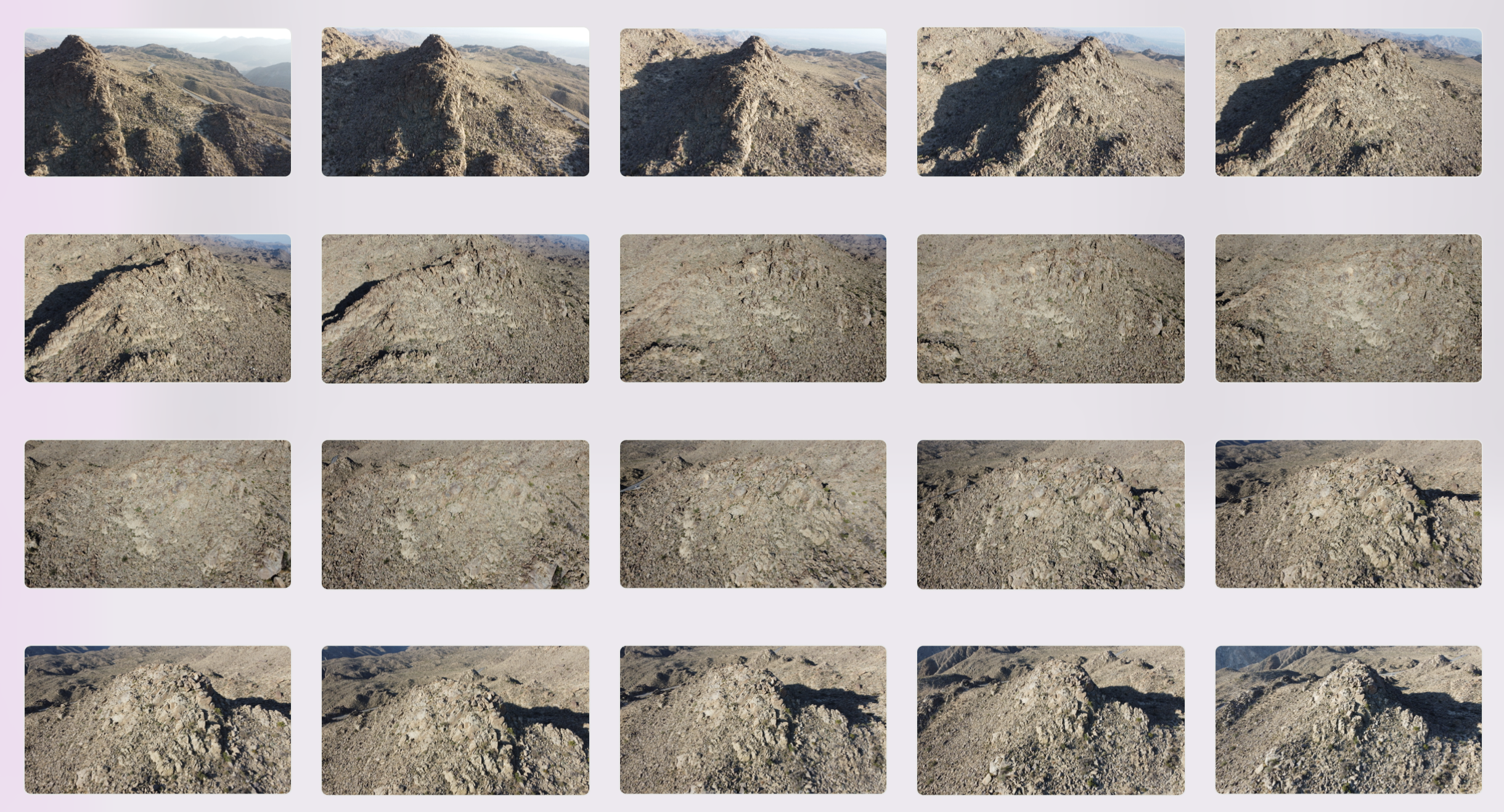
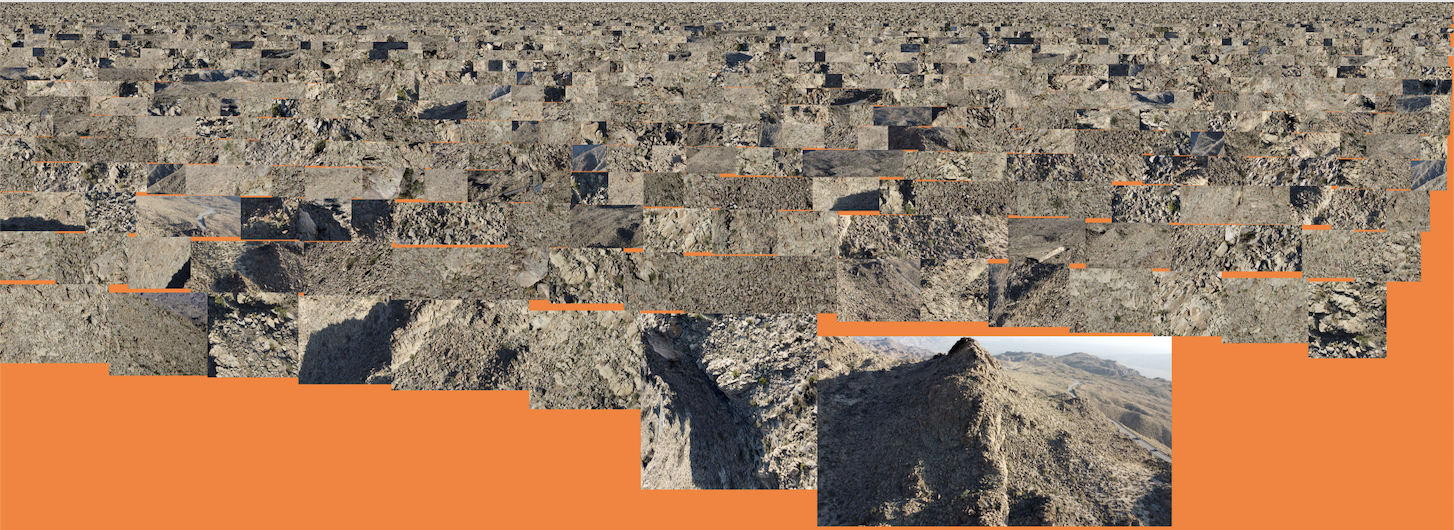
listed #File(s): 11 usable #File(s) listed in sfm_data: 11 usable #Intrinsic(s) listed in sfm_data: 7 我们这次挑战下一个难度看起来更高的,一片大沙漠。大家可以到 https://github.com/openMVG/Image_datasets 下载,在 Image_datasets/Drone/Palm_Desert_Micro 中。
如前所述,在openMVG/build/software/SfM下运行:
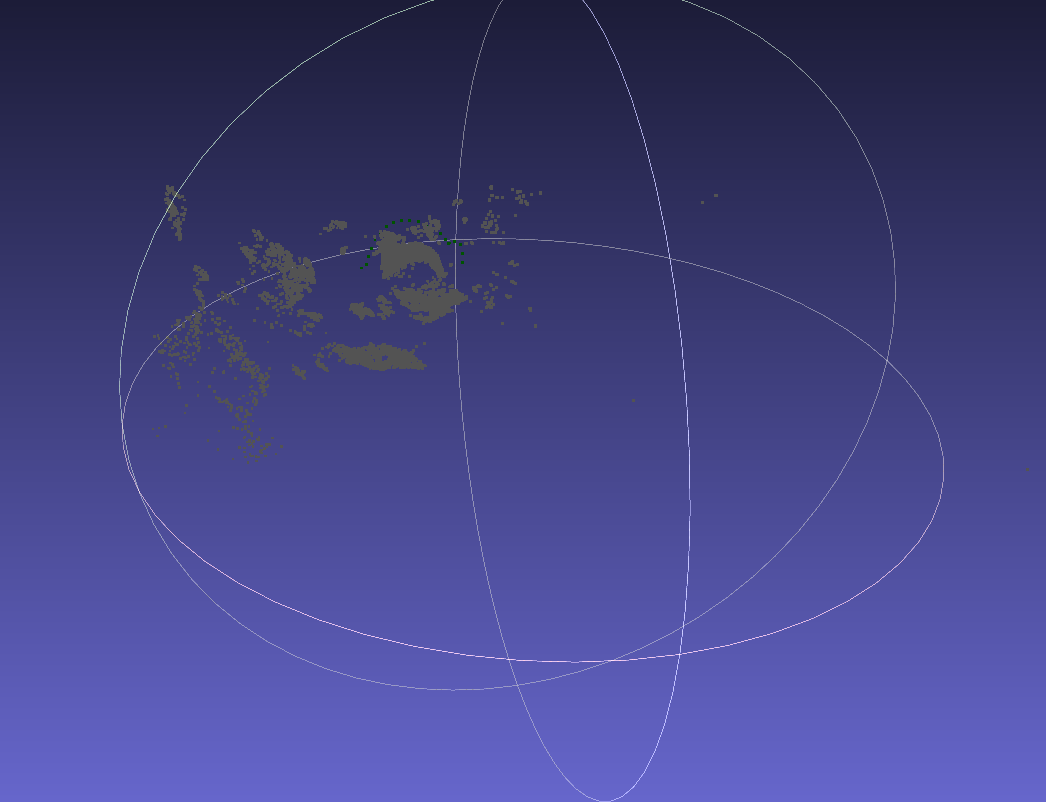
讯享网python SfM_SequentialPipeline.py ~/workspace/Image_datasets/Drone/Palm_Desert_Micro/ ~/workspace/desert
生成的效果如下:
第二步,将openMVG的格式转换成openMVS的格式:
openMVG_main_openMVG2openMVS -i sfm_data.bin -o scene.mvs -d scene_undistorted_images 第三步,生成密集点云:
讯享网~/workspace/openMVS/openMVS_build/bin/DensifyPointCloud scene.mvs
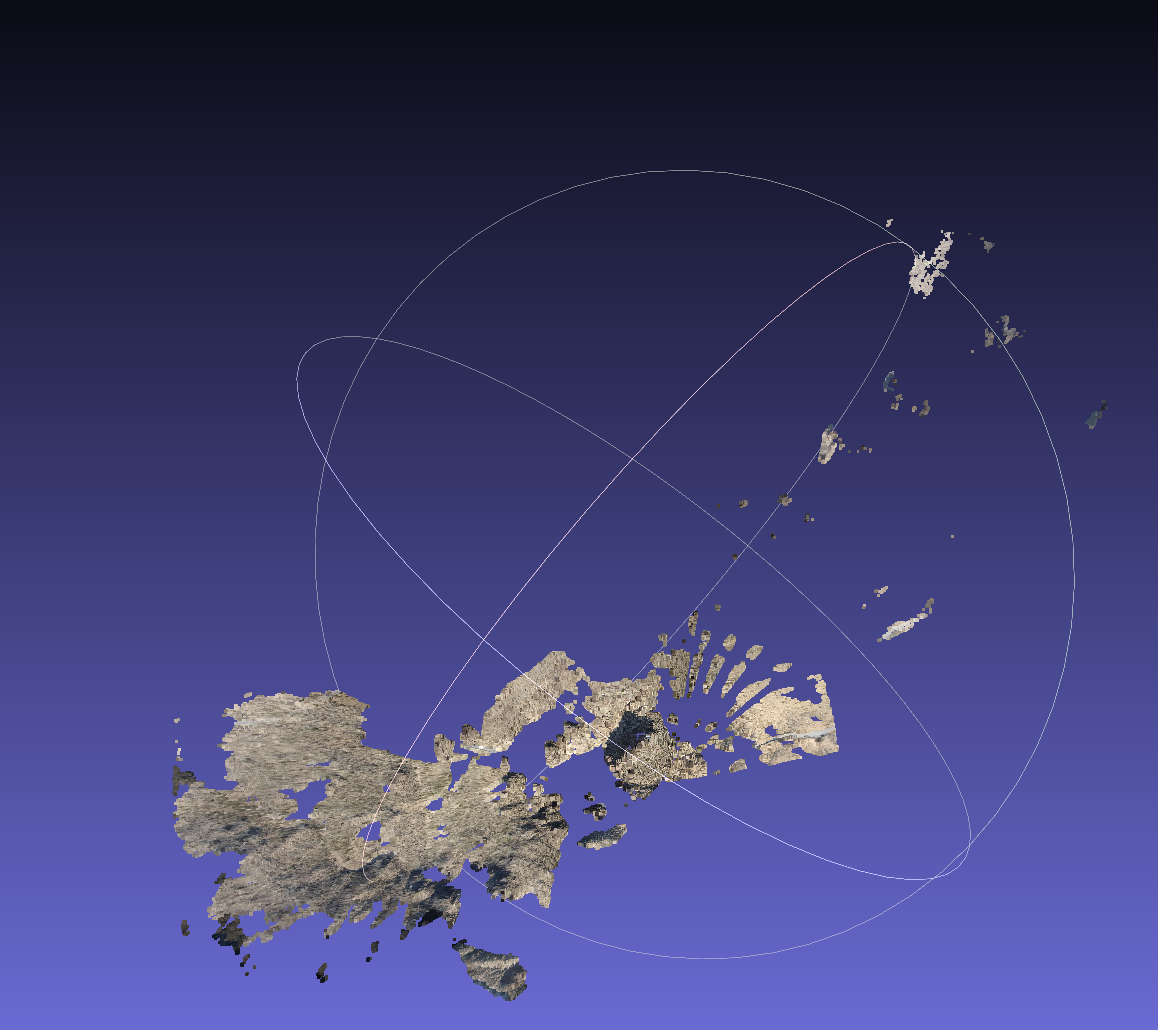
这样有点地形起伏的意思了哈。
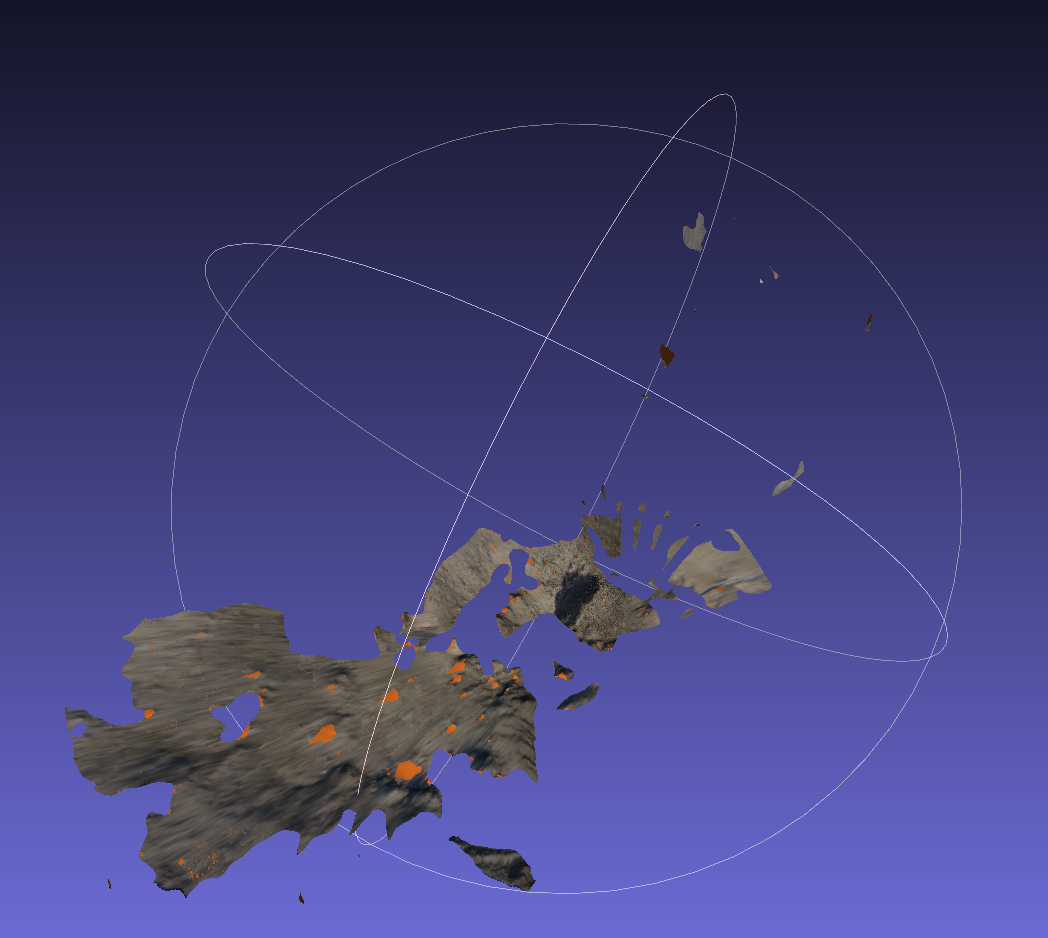
第四步,网格重建
~/workspace/openMVS/openMVS_build/bin/ReconstructMesh ./scene_dense.mvs 
第五步,网络细化
讯享网~/workspace/openMVS/openMVS_build/bin/RefineMesh ./scene_dense_mesh.mvs

第六步,网络纹理
~/workspace/openMVS/openMVS_build/bin/TextureMesh ./scene_dense_mesh_refine.mvs glb模型生成,大功告成!
完工之后的glb显示出来效果是这样的:
同样,加载时记得同目录下有scene_dense_mesh_refine_texture.png。
画廊
我们来看看默认参数下还原的一些场景的效果。
Avignon Hotel Des Monnaies 阿维尼翁莫奈酒店

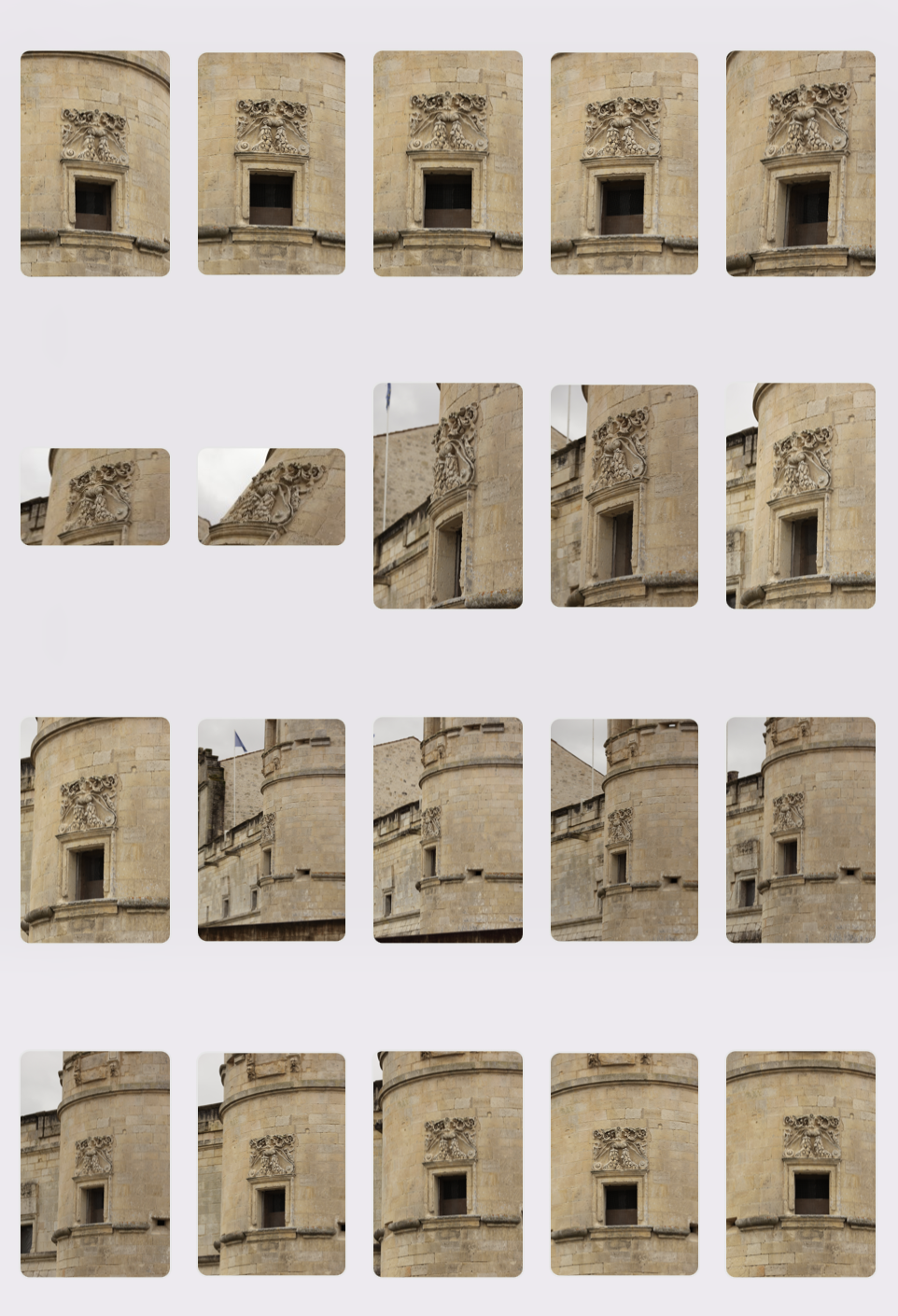
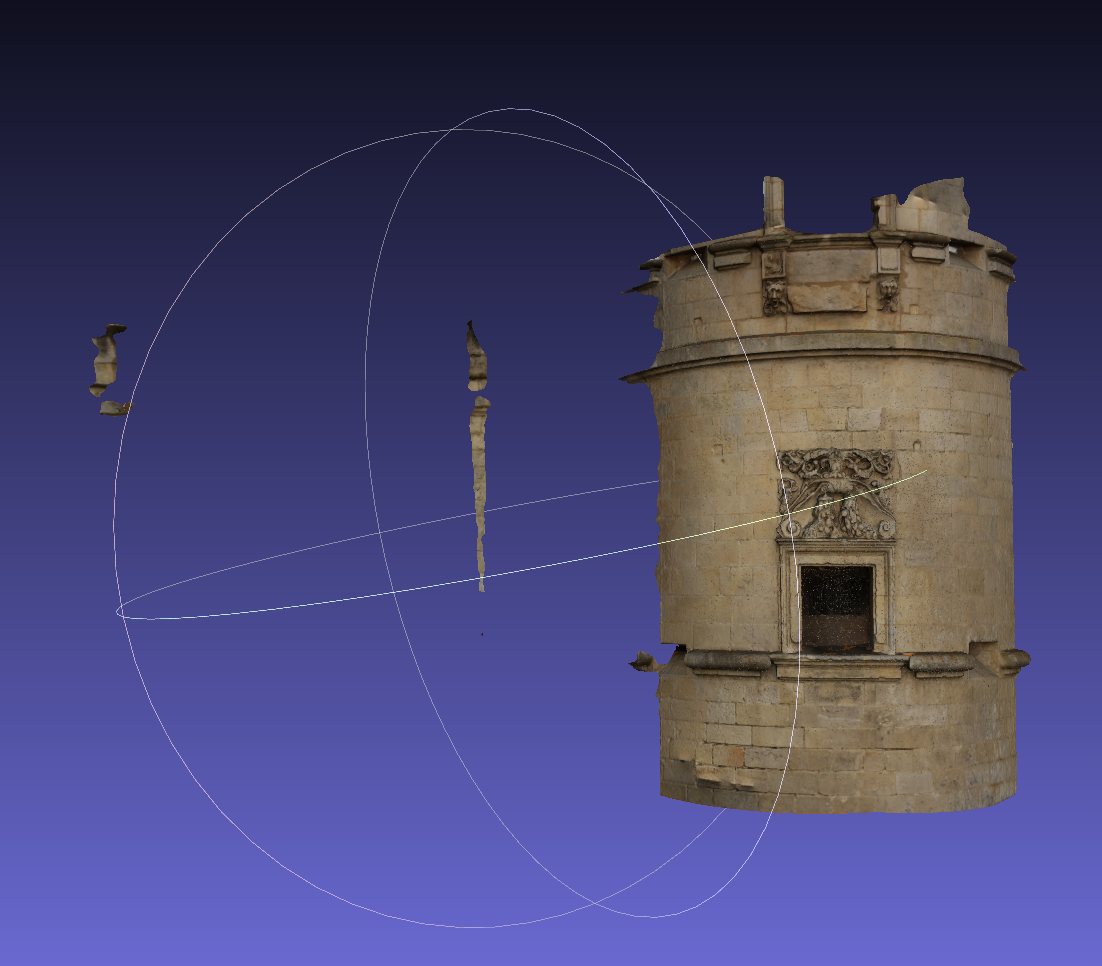
Bouteville Window Detail
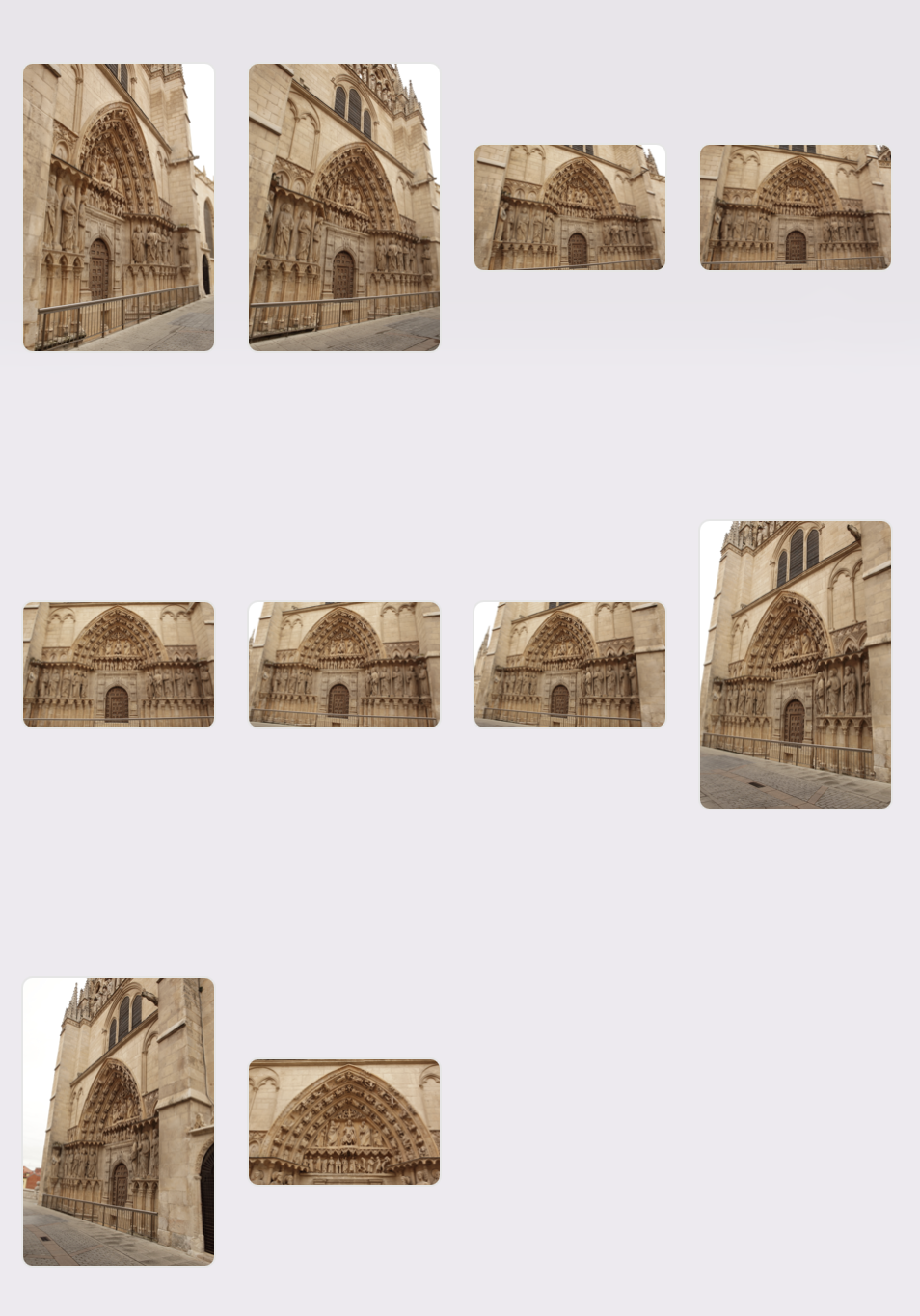
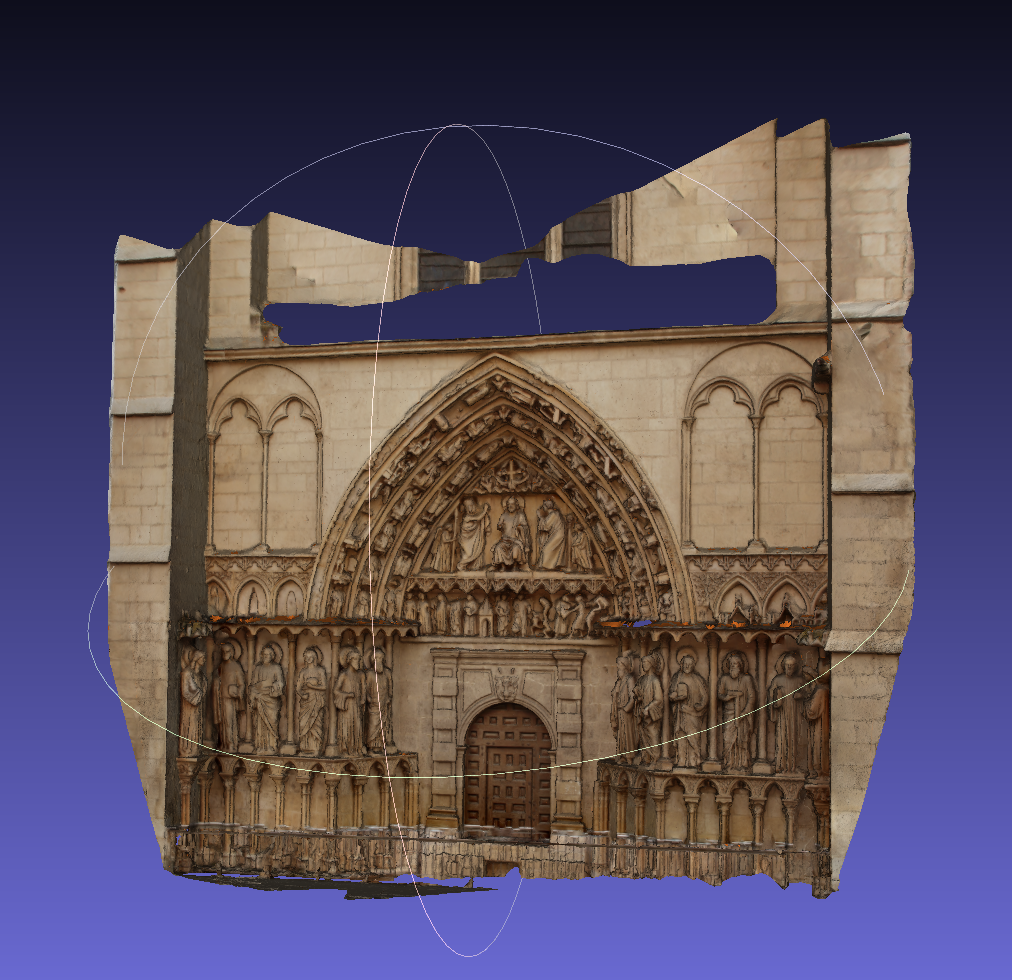
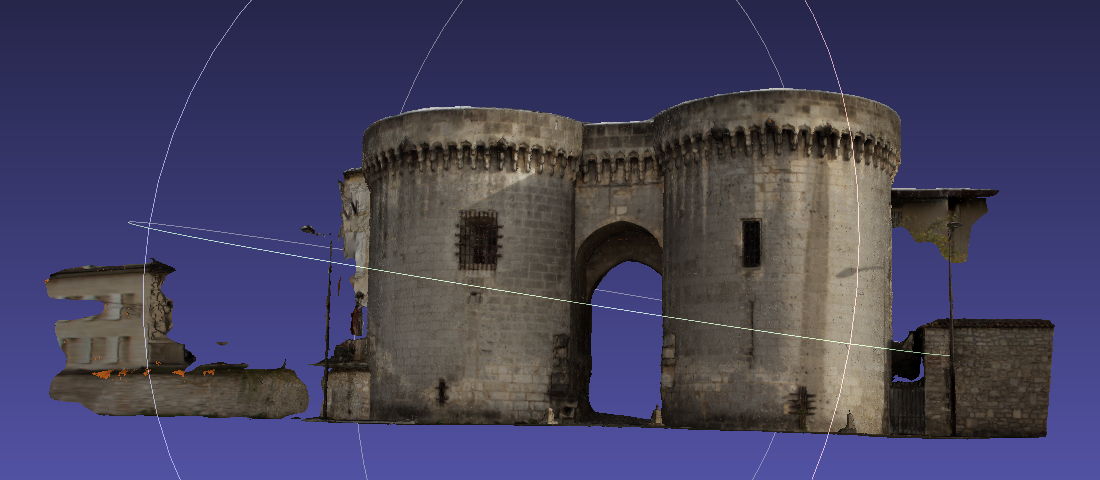
Burgos Puerta de la Coroneria 布尔戈斯大教堂科罗内里亚门
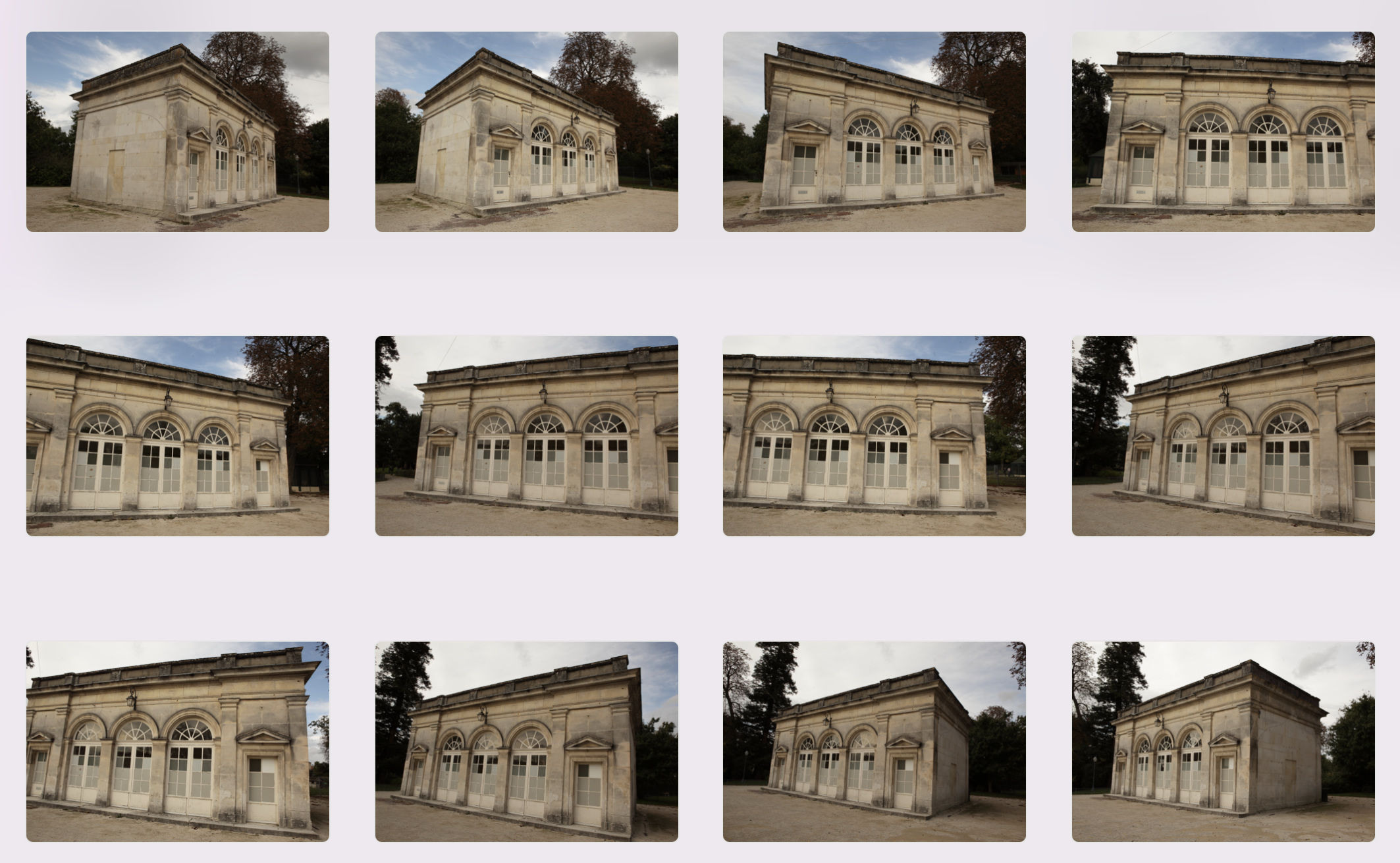
Cognac Garden Building 干邑花园

Cognac St Jacques Door 干邑圣雅克门
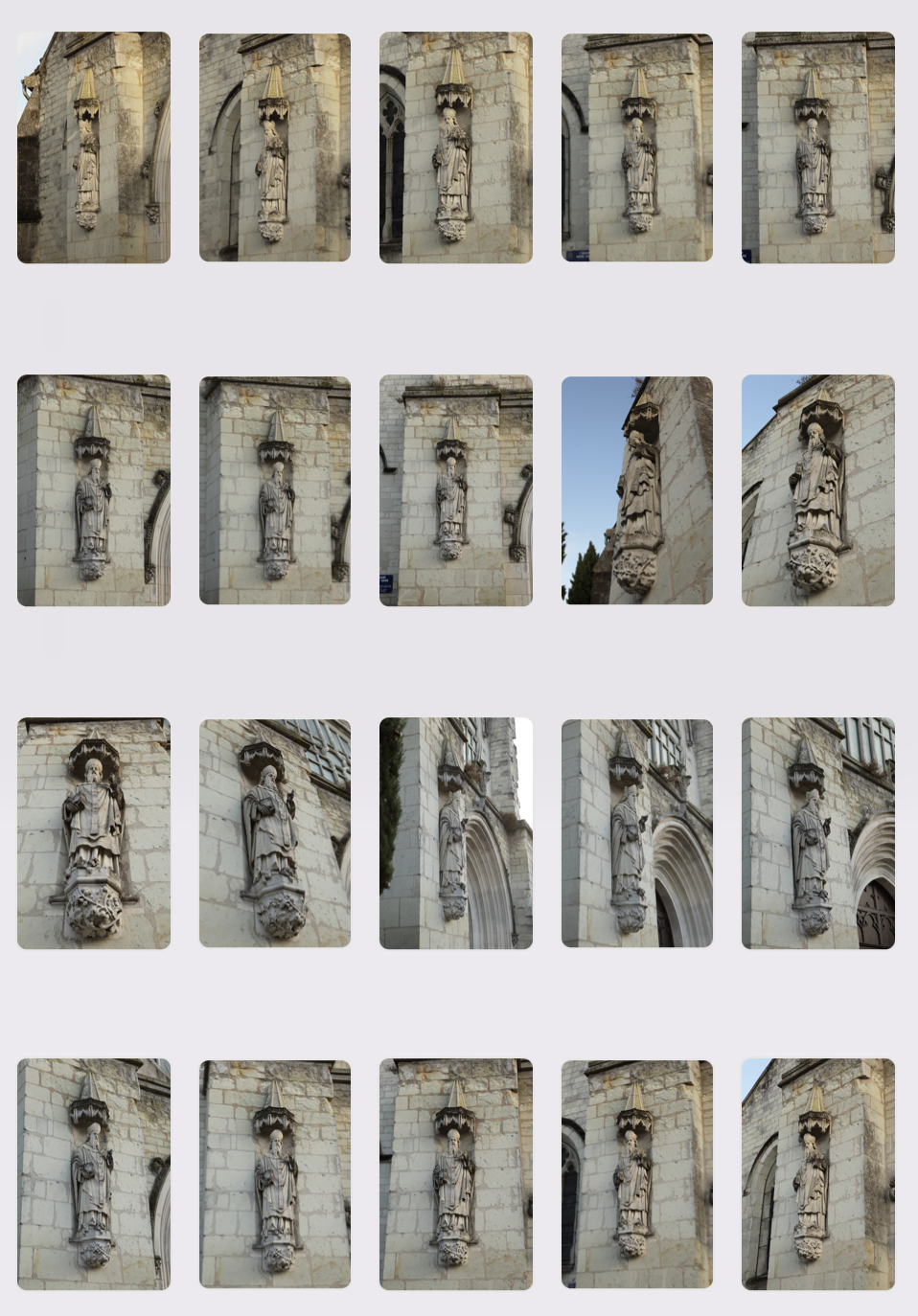
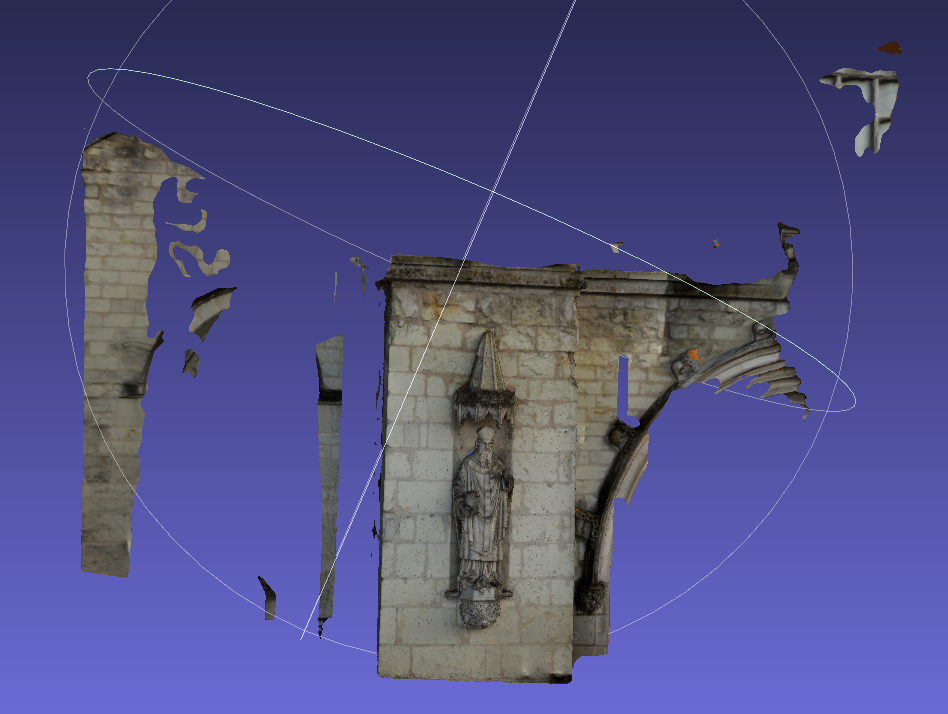
Mirebeau St Hilaire Statue 米雷博圣希莱尔雕像
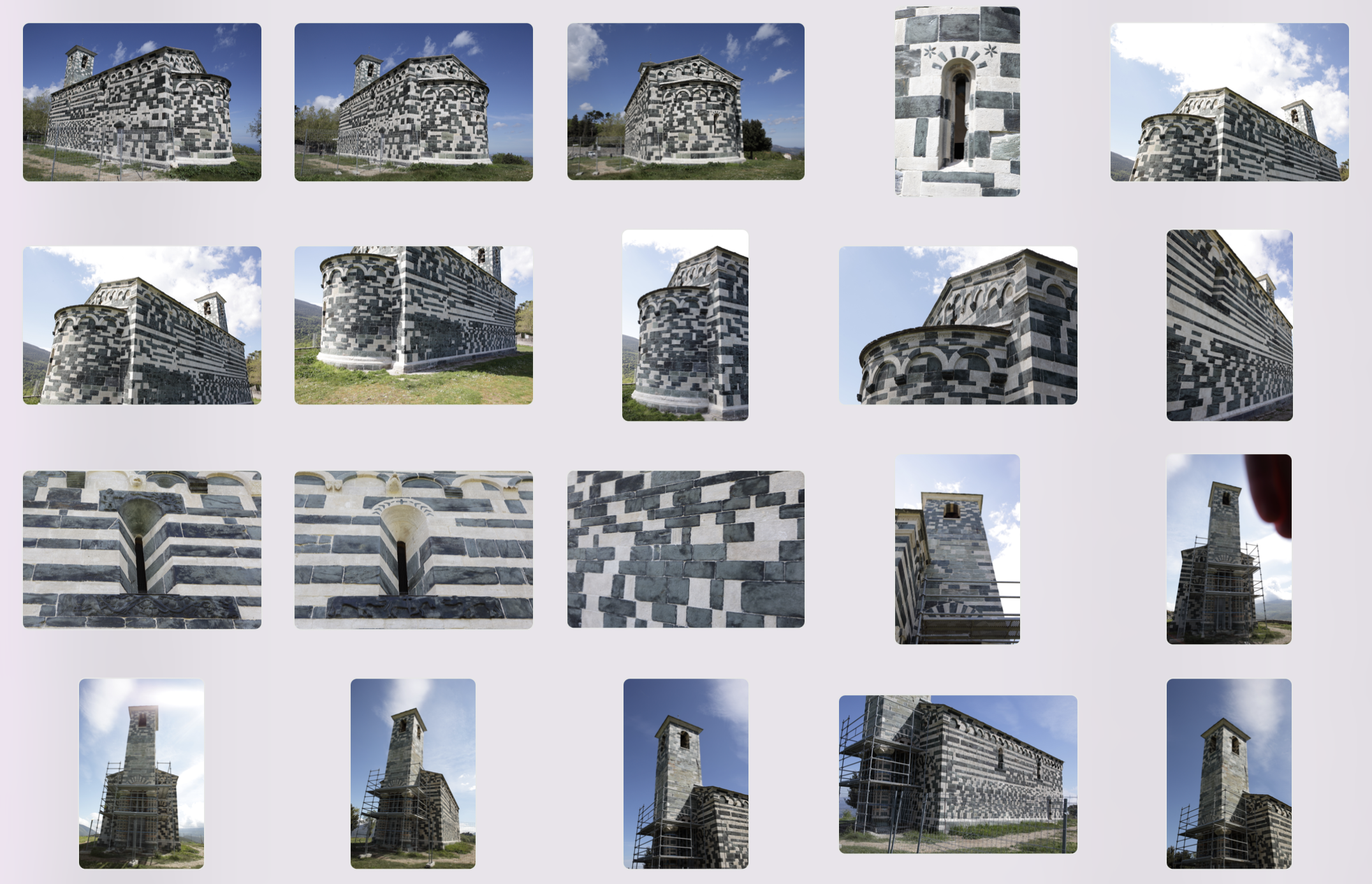
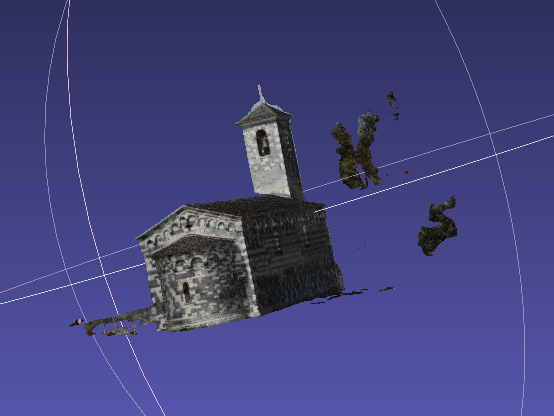
Murato Corsica Church 科西嘉岛穆拉托教堂
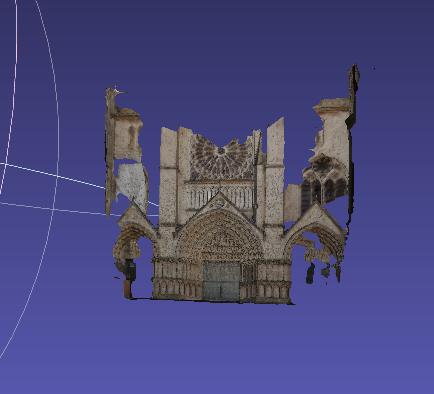
Poitiers Cathedral Main Entrance Door 普瓦捷大教堂正门
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/126709.html