
前面几篇博客介绍了卡尔曼滤波的一些基本算法,其实目标追踪,定位,传感器融合还有很多问题要处理,这些我们在以后的系列博客中在进一步细讲,现在我想给大家介绍一下无人驾驶汽车系统开发中需要的控制相关的理论和技术,还是和第一篇说的那样,我想到哪就写到哪,追踪和定位等更高级的算法我在后面会继续写。所以感兴趣的同学可以关注我的博客,无人驾驶汽车系统入门系列博客会一直更新下去。
这一篇主要讲控制的入门,为什么需要控制理论,以及最经典的PID控制,更高级的应用在实际系统中的控制算法我会在后面的文章中详述。编写不易,转载请注明出处:http://blog.csdn.net/adamshan/article/details/
为什么需要控制理论
试想有如下场景,当你驾驶一辆汽车通过这个弯道的时候,假设你已经知道你要开的路线,那么你会怎么去操作控制你的车呢?

显然,如果你不是专业的选手的话,你无法做到一步到位的控制,你需要一边观察车辆相对于你想要开的路线的相对偏差,一边调整你的方向盘的角度和油门踏板的力度,这种基于环境反馈的控制我们称为 反馈控制 。反馈控制是现代控制理论的基础,这是反馈控制的一般思路:
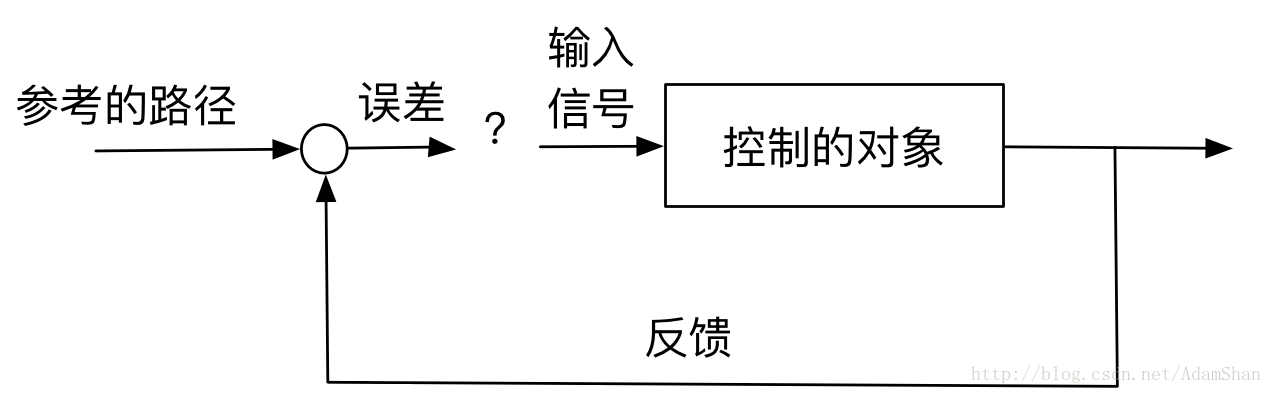
我们希望我们控制的对象(无人车)能够按照我们希望(规划好)的路径行驶,我们会将环境当前给我们的反馈(我们当前的位置)和参考线进行比较,得到我们当前偏离参考线的距离(误差),基于这个误差,我们设计一定的算法来产生输出信号,使得这个误差不断的变小,这样的过程就是反馈控制的一般过程。那么我们如何基于这个误差来产生控制指令呢?我们最直观的感觉就是要让误差在我们的控制下逐渐变小直到为0:
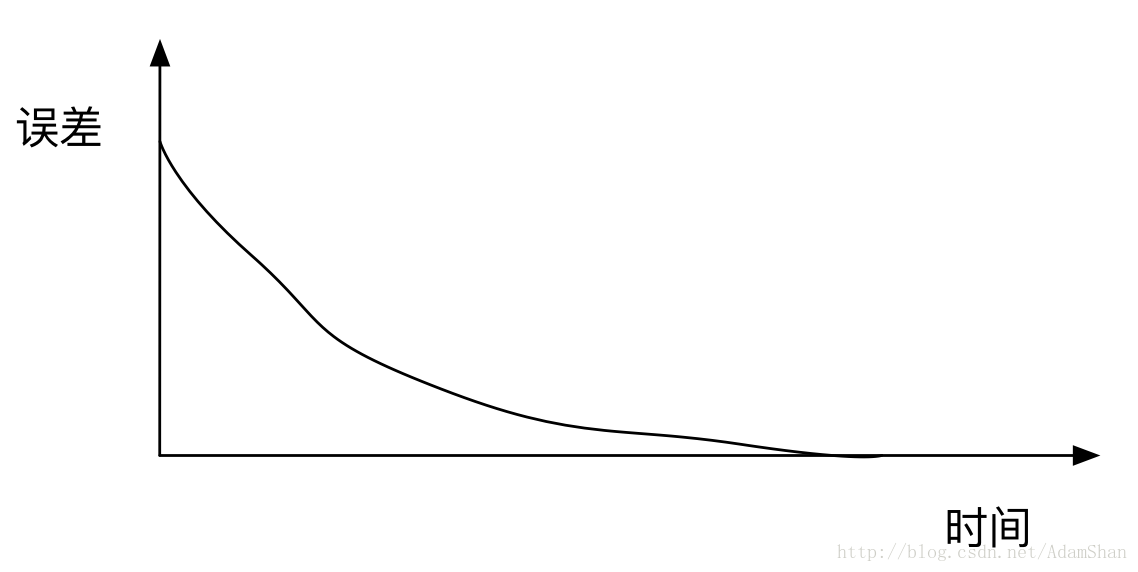
0误差就意味着车一直在你想让它开的路径上开。如何减少误差就是我们这几篇博客要向大家介绍的内容。
为了了解反馈控制,我先向大家介绍 PID控制,PID控制是目前利用最为广泛的控制理论,我们以它为出发点讨论控制理论。
比例,积分和导数
PID就是指 比例(proportion)、积分(integral)、导数(derivative),这三项表示我们如何使用我们的误差来产生控制指令,整个流程如下:
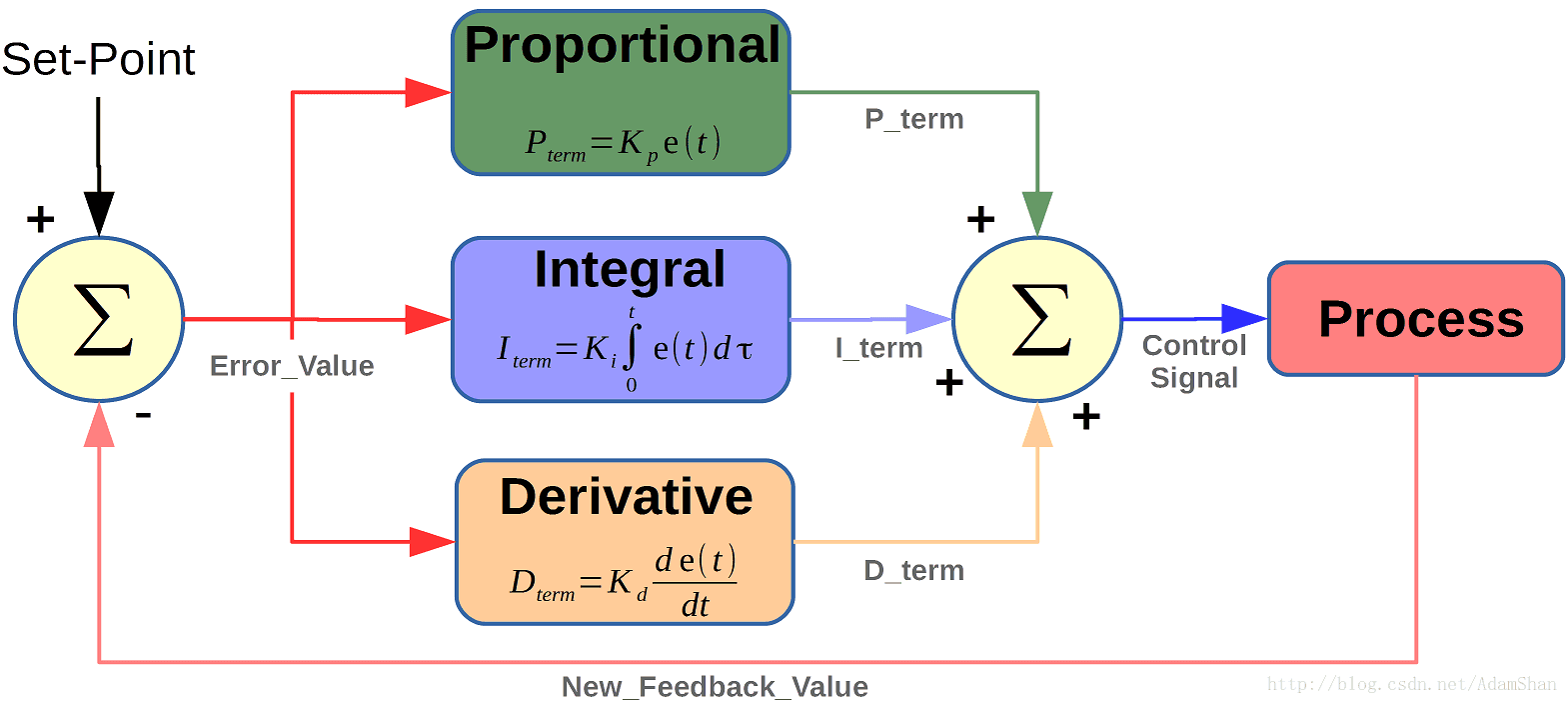
首先是根据反馈和参考值求出误差,这里的误差根据具体的情况可以是各种度量,比如说控制车辆按照指定的路径形式,那么就是车辆当前位置和参考线的距离,控制车辆的速度在设定的值,那么就是当前速度和设定速度的差值,求出误差以后,再根据误差求比例,积分和微分三项,其中 Kp , Ki , 和 Kd 是三项的系数,它们决定着这三项对最后输出的影响的比重。将 P,I,D 三项求和作为最后的输出信号。我们分别讨论这三项的意义。
P控制
考虑一个简单的情况,假设我们希望无人车按照图中绿线行驶,但是我们的车在如图所示的位置:
那么我们要转多少度角呢?如果都按照固定的角度转(如下图),那么车的轨迹将如图中所示:
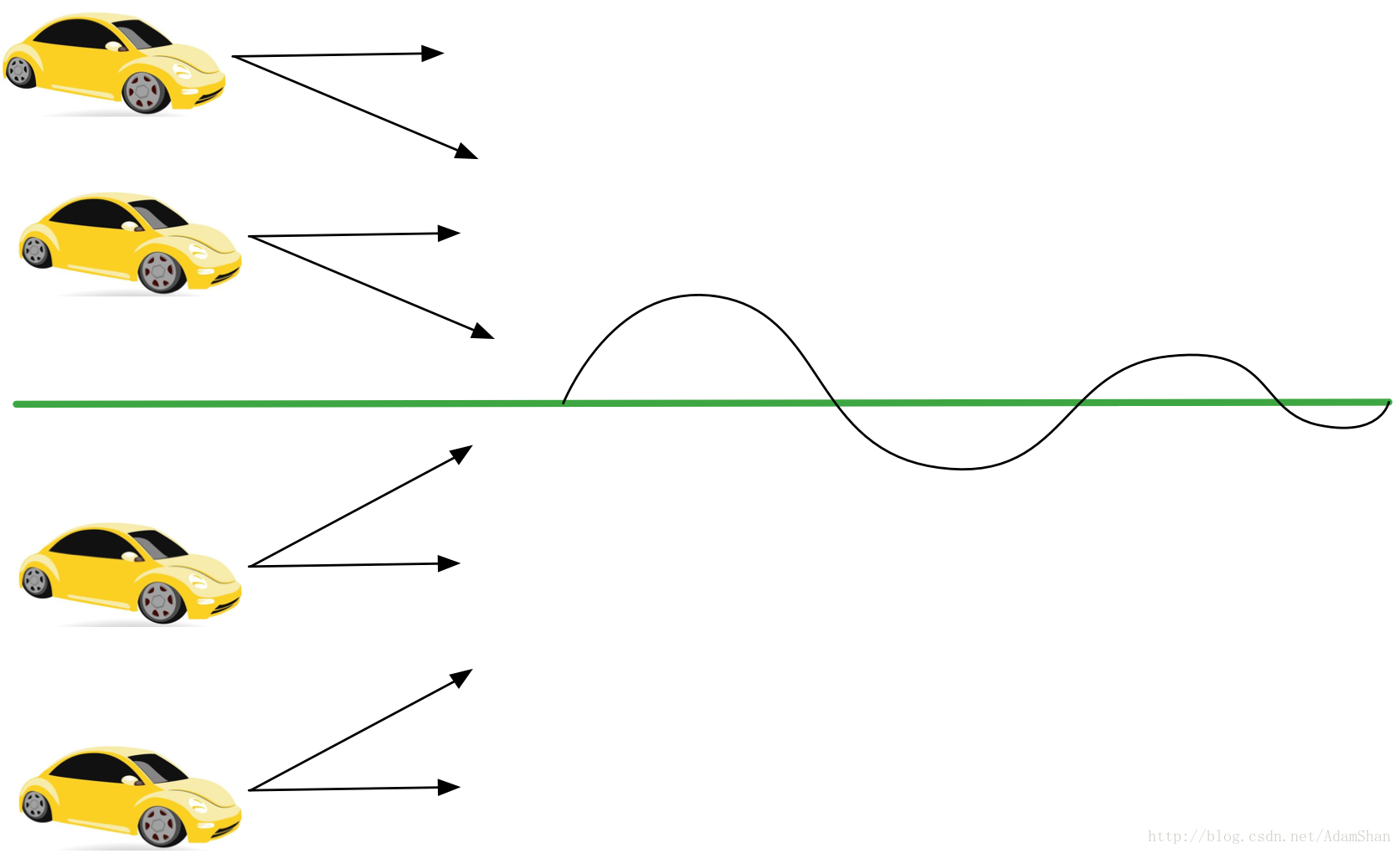
那么显然坐这样的车是不舒服的。一个直观的解决方法就是使用比例控制。如图所示,当偏差大的时候,我们偏转更多的角度,当偏差小的时候,则偏转小一点。
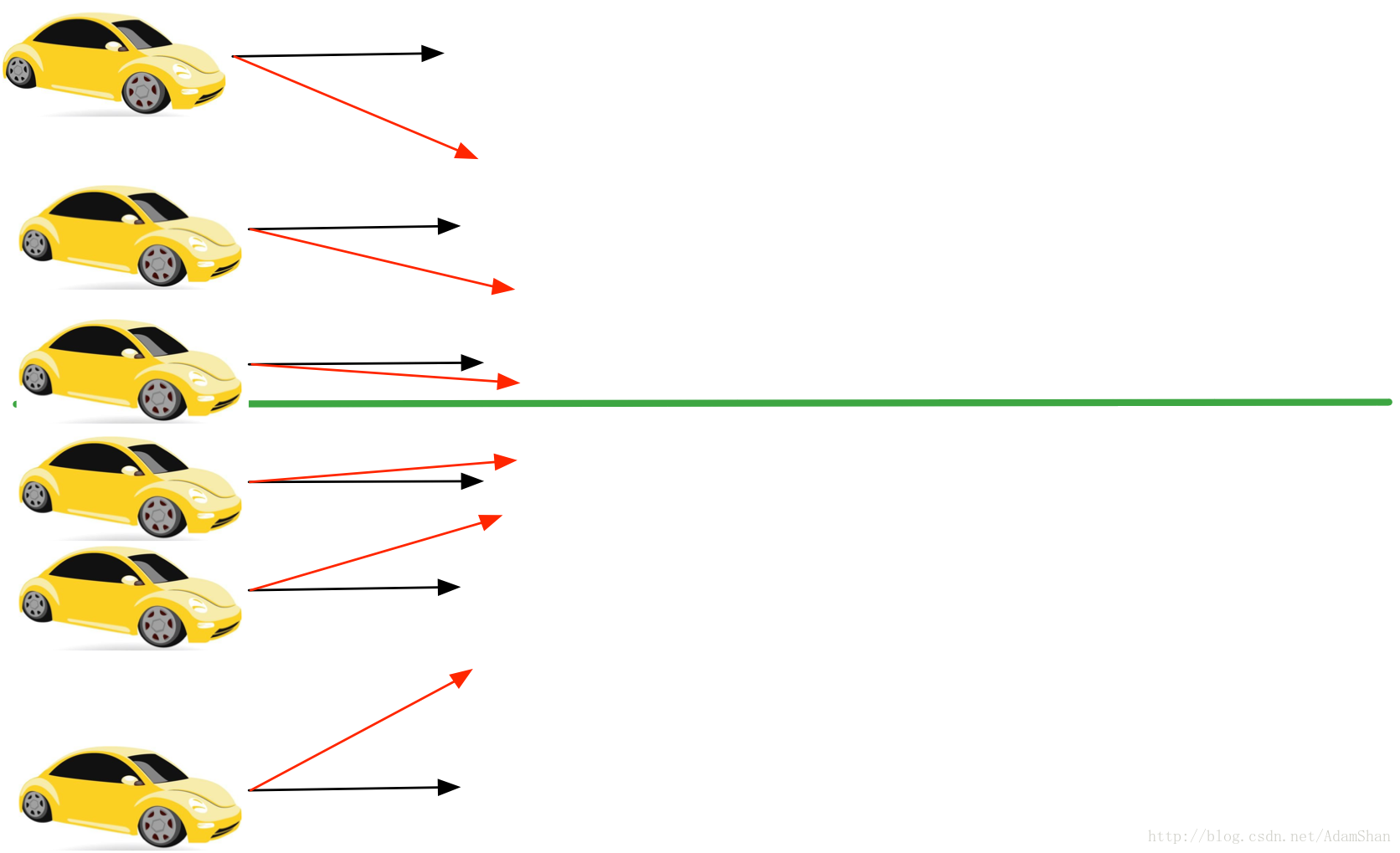
那么这就是P control(比例控制)这里我们使用 CTE(Cross Track Error) 作为偏差度量 ,CTE就是我们到参考线的距离。那么这个时候转角就变成了:
steering angle=Kp⋅e(t)
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/123787.html