
一、ARM体系结构
1、ARM相关的概念
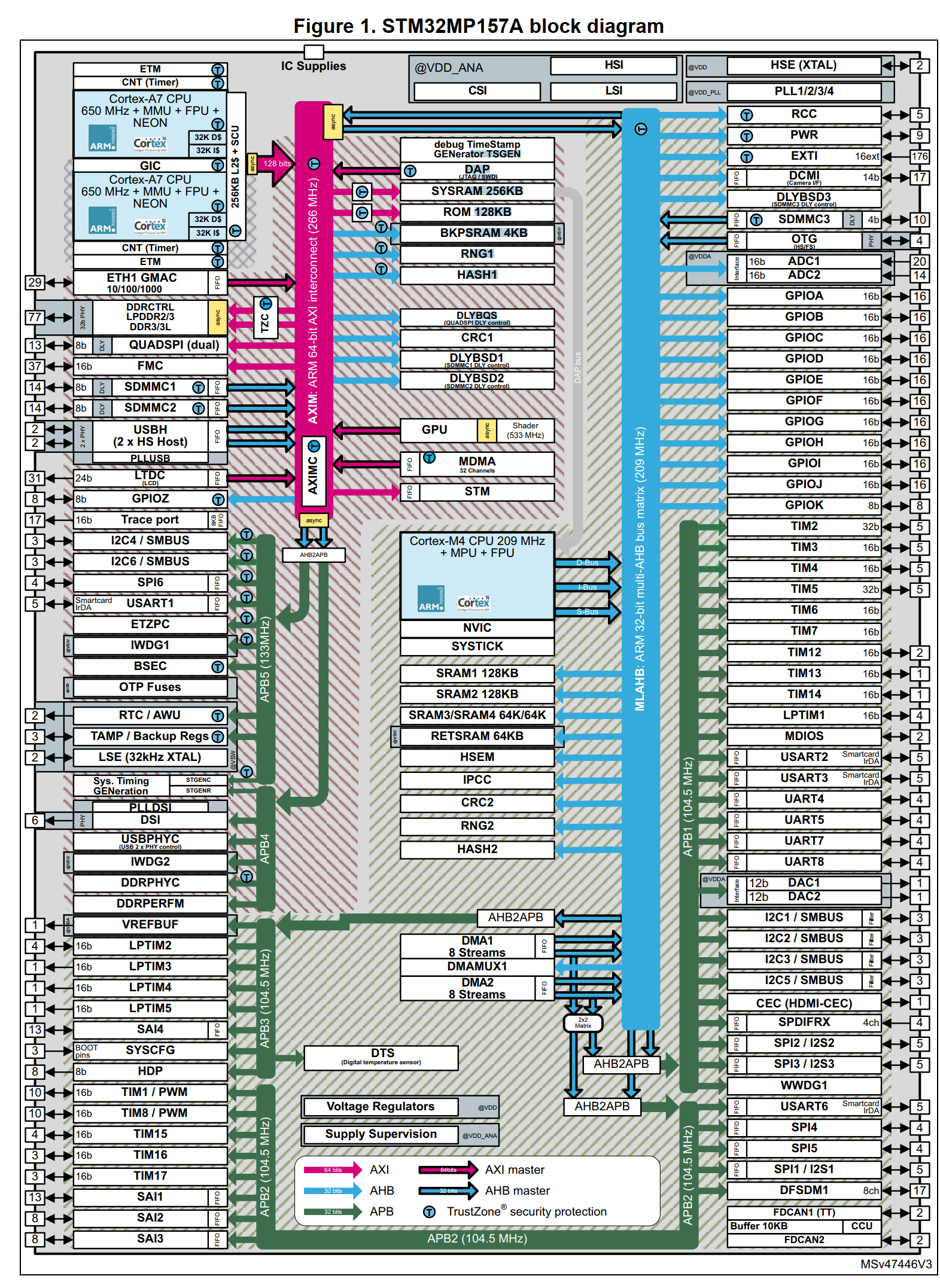
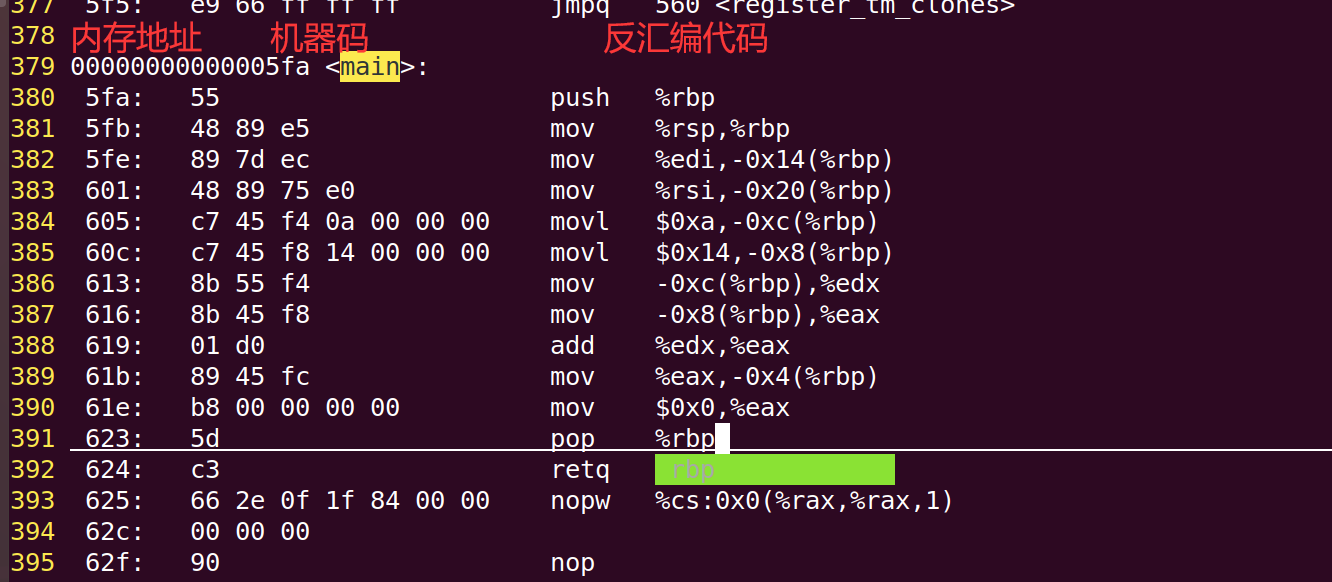
1. 机器码:编译器将汇编指令编译生成具有特定功能的机器码(二进制数010101的集合), 执行机器码可以完成某个特定的功能。 2. 汇编指令:执行汇编指令可以完成某个特定的功能(指令是硬件,加法运算器等,由三极管mos管组装而成)。 3. 汇编指令集:很多不同功能的汇编指令的集合。汇编指令的可移植性比较差 4. 架构:汇编指令集的版本的命名 ARM架构 X86-64架构 Mips架构 PowerPC架构 Risc-V架构 loongarch架构 ARM架构的版本: ARM-v1 ~ ARM-v6 : 目前已经淘汰 ARM-v7:32位的架构,支持32位的ARM指令集 ARM-v8:64位的架构,支持64位的ARM指令集,向下兼容ARM-v7架构 ARM-v9: 2021年发布的新的一代ARM架构,目前ARM高端处理器基本使用的都是 ARM-v9架构 5. ARM内核:ARM公司基于不同的ARM架构,设计出不同性能的ARM内核。 ARM内核的命名方式: Cortex-A53/A55/A72/A76/A78/A710/A510 : 主要用于高端处理器中 Cortex-x1/x2/x3 : 主要用于高端处理器中 Cortex-M0/M1/M3/M7 : 主要用于单片机中,低端的处理器 cortex-R系列:主要针对于对实时性要求比较高的场合 6. SOC : System On Chip:片上系统 一款处理器,在内核的基础之上,有添加了很多不同的外设资源, 这样的处理器可以统称为SOC. SOC : 片上系统, 可以是单片机,可以是高端处理器 CPU : 中央处理单元, 可以是单片机,可以是高端处理器 MCU : 微控制单元, 主要指的单片机 MPU : 微处理单元,主要指高端处理器 GPU : Graph Process Unit,图形处理单元 VPU : Video Processing Unit,视频处理单元讯享网
2、RISC和CISC的区别
2.1RISC指令集
讯享网RISC : 精简指令集 ARM架构,RISC-v架构,Mips架构,PowerPC架构,都属于精简指令集的架构 精简指令集特点:指令相对比较简单,比较容易理解 指令的周期和指令的宽度固定。 指令周期:执行一条汇编指令需要的时钟周期的个数。 CPU的主频,CPU的频率的倒数为周期 比如:CPU主频为2GHz, 一个周期的时间为 = 1 / 2G (单位s) 指令宽度:指令被编译生成机器码,1条汇编指令占用代码段的空间, 32位处理器或者64位处理器,指令的宽度为4字节。


2.2 CISC指令集
CISC : 复杂指令集 X86, X86-64, 属于复杂指令集的架构 复杂指令集的特点:复杂指令集更加注重指令的功能性, 指令的周期和指令的宽度不固定。
3、ARM架构数据类型的约定
3.1 ARM-v7架构数据类型的约定
讯享网byte ---> 字节 ---> 8bits ---> 1字节 half word ---> 半字 ---> 16bits ---> 2字节 word ---> 字 ---> 32bits ---> 4字节 double word ---> 双字 ---> 64bits ---> 8字节
3.2 ARM-v8架构数据类型的约定
byte ---> 字节 ---> 8bits ---> 1字节 half word ---> 半字 ---> 16bits ---> 2字节 word ---> 字 ---> 32bits ---> 4字节 double word ---> 双字 ---> 64bits ---> 8字节 quad word ---> 四字 ---> 128bits ---> 16字节4、ARM内核处理器的工作模式
4.1 Cortex-M核处理器的工作模式
讯享网线程模式:执行的用户代码,主要是主函数中的代码 异常模式:执行的是异常处理程序,中断,复位,硬件错误
4.2 Cortex-A核处理器的工作模式
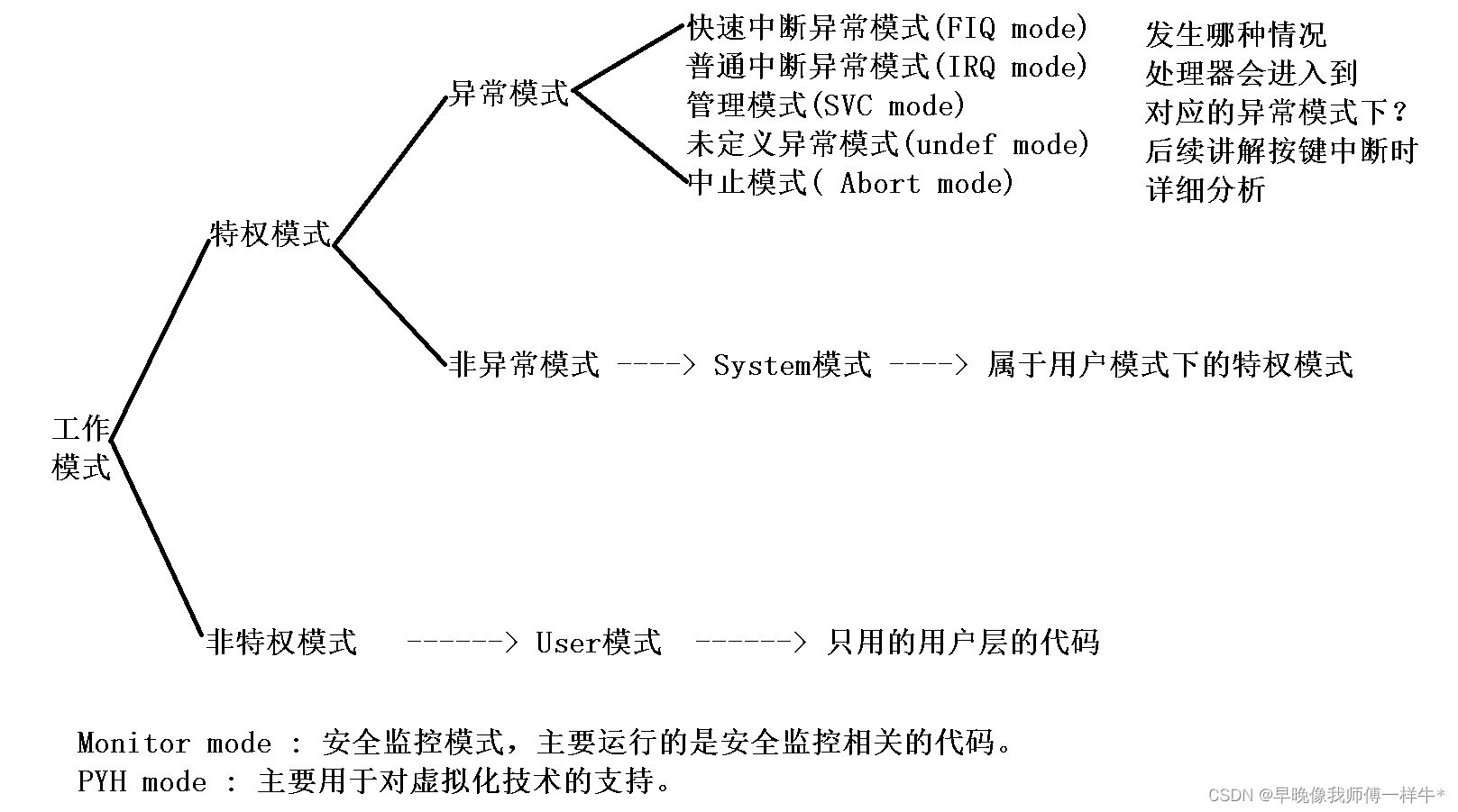
不同的工作模式下,执行不同的代码,最终完成不同的功能。

5、ARM寄存器的组织(重点!重点!重点!)
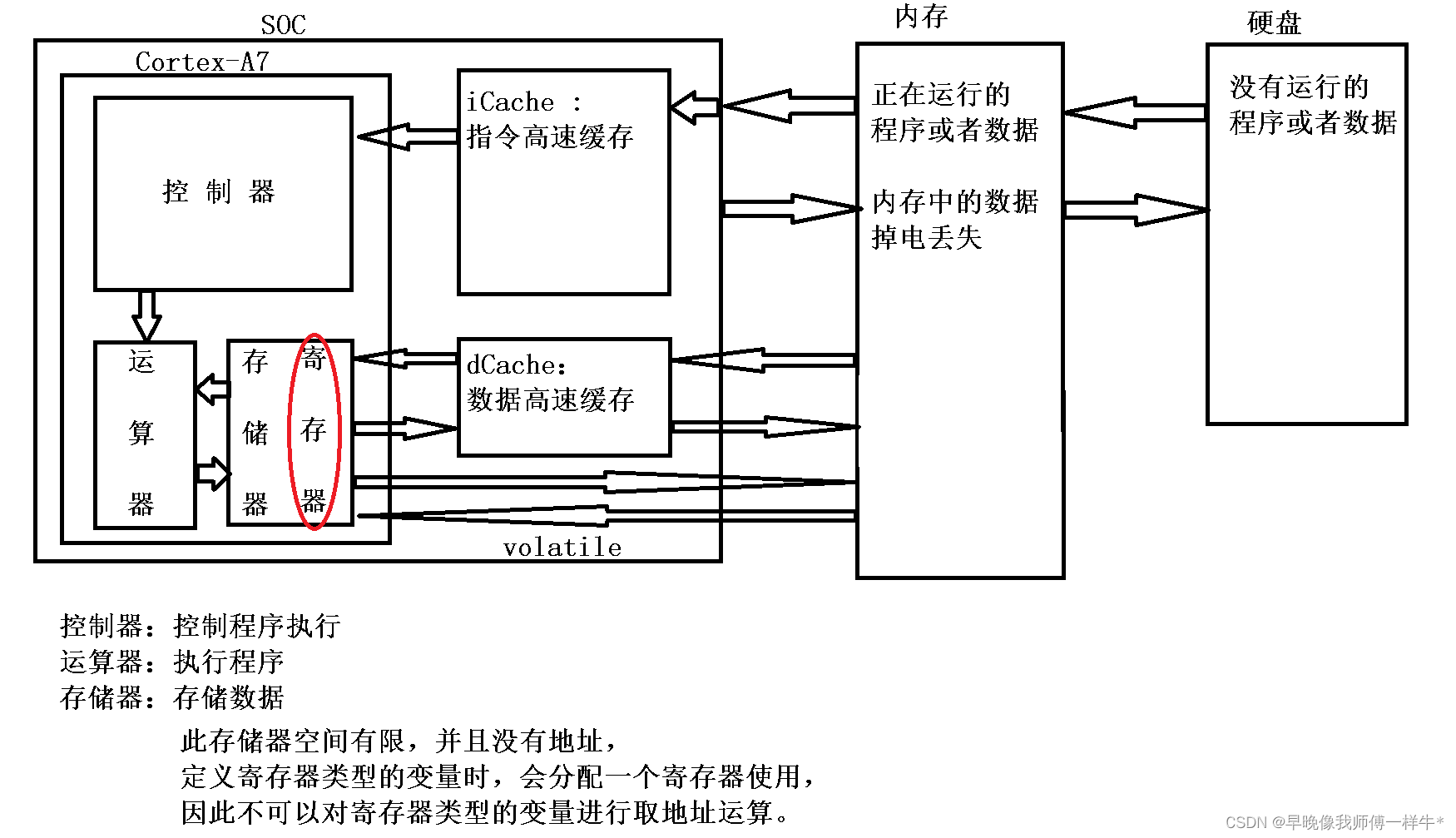
5.1 寄存器的介绍
5.2 寄存器组织
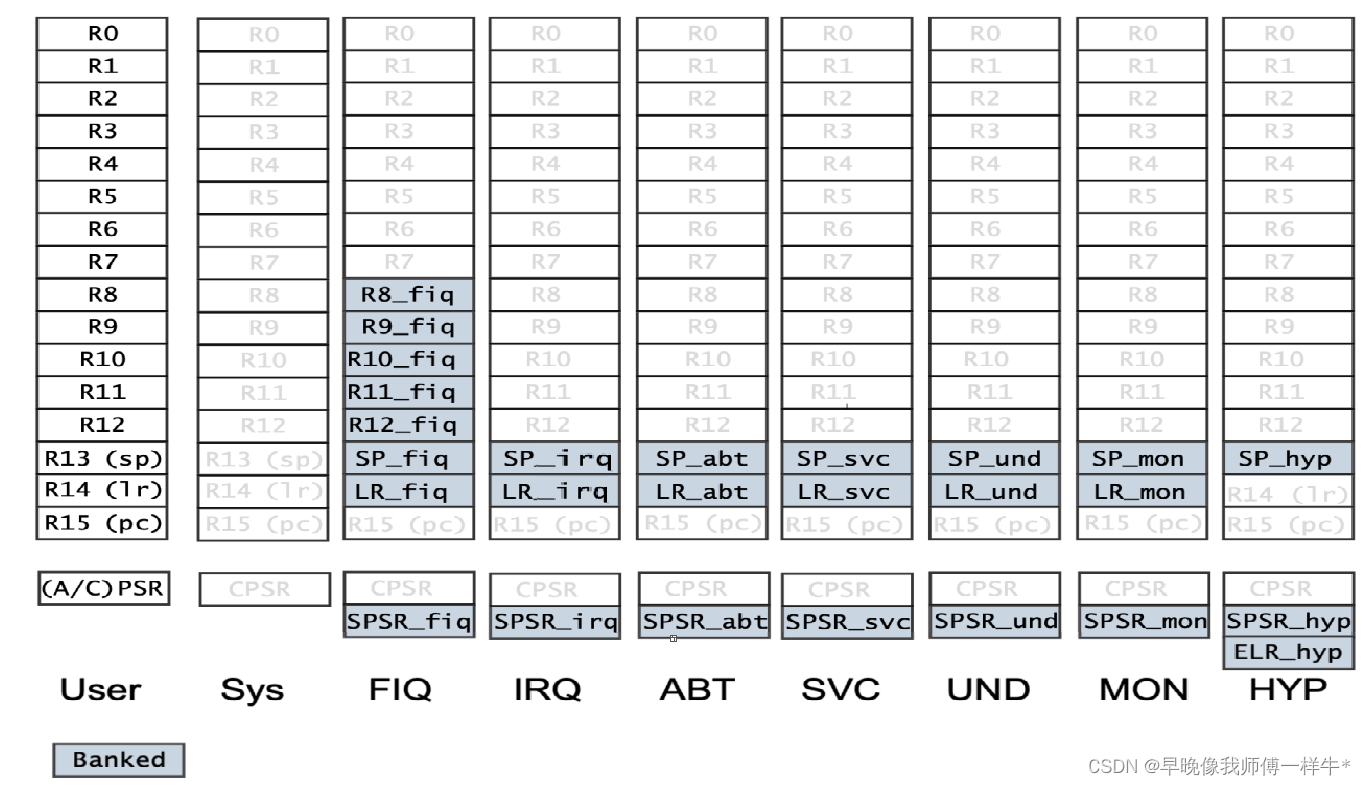
灰色表示不存在
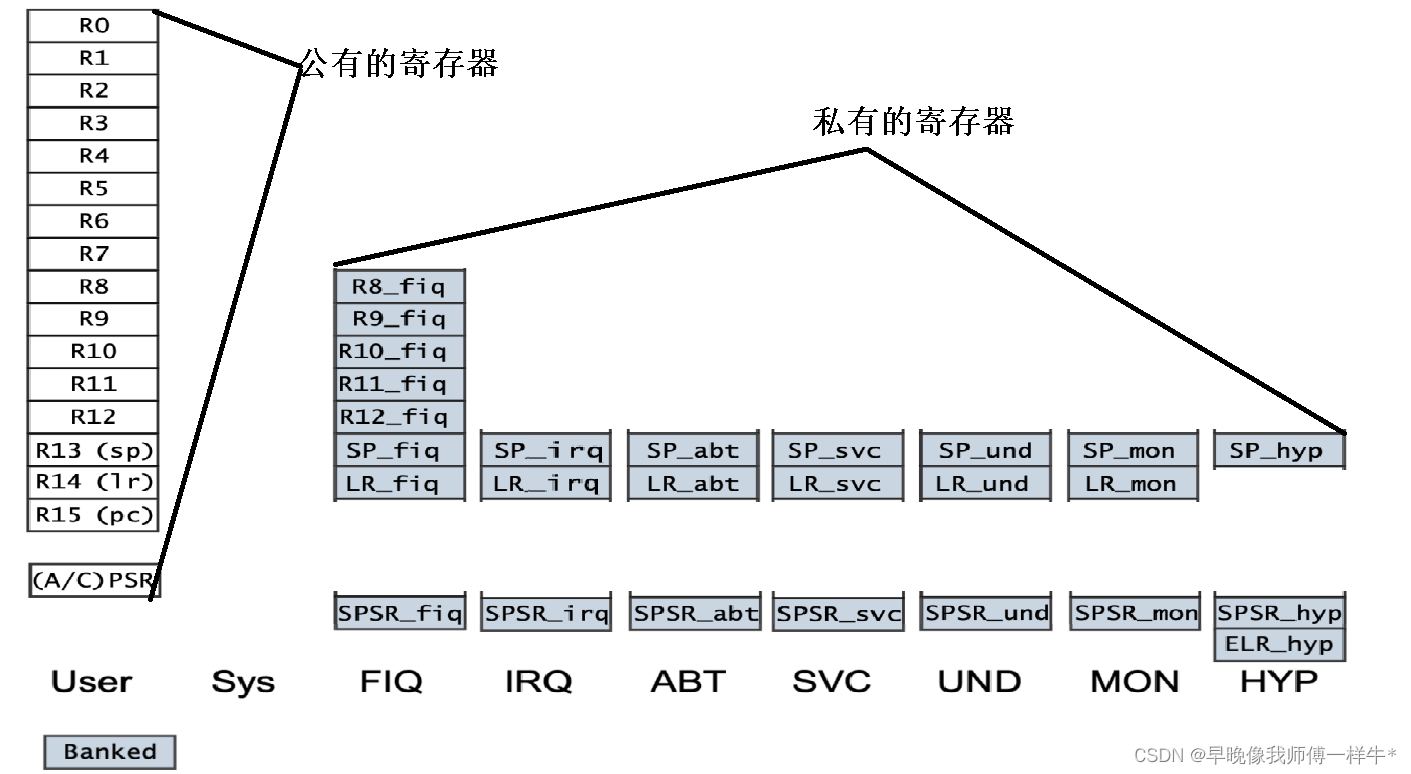
1. 每个小方块是一个寄存器,32位处理器,每个寄存器都是32位的。 2. 寄存器是没有地址的,通过寄存器的编号进行访问,R0-R15,cpsr,spsr 寄存器为什么没有地址? add r0, r1, r2 | 编译生成32位的机器码 | 32位机器码中需要存储 add的信息,r0,r1,r2(如果用地址的话,地址就占32位,r0,r1,r2每个寄存器都有32个地址,32位的 机器码存不下,溢出了,所以不用地址指向寄存器) 的信息。 add被编译生成4位机器码 r0,r1,r2也会被编译生成4位机器码 3. 每种工作模式下,只能访问自己对应模式下的寄存器,不可以访问其他模式下的 User和Sys模式下,最多可以访问17个寄存器; FIQ/IRQ/SVC/ABT/UND/MON模式下,最多可以访问18个寄存器; HYP模式下,最多可以访问19个寄存器。 4. Banked类型的寄存器表示私有的寄存器; 非Banked类型的寄存器表示公有的寄存器。 5. 如果工作模式下自己有的就访问自己的,没有就访问共有的 6. User模式和Sys模式共用同一套寄存器组织。6、特殊的寄存器
6.1 SP寄存器
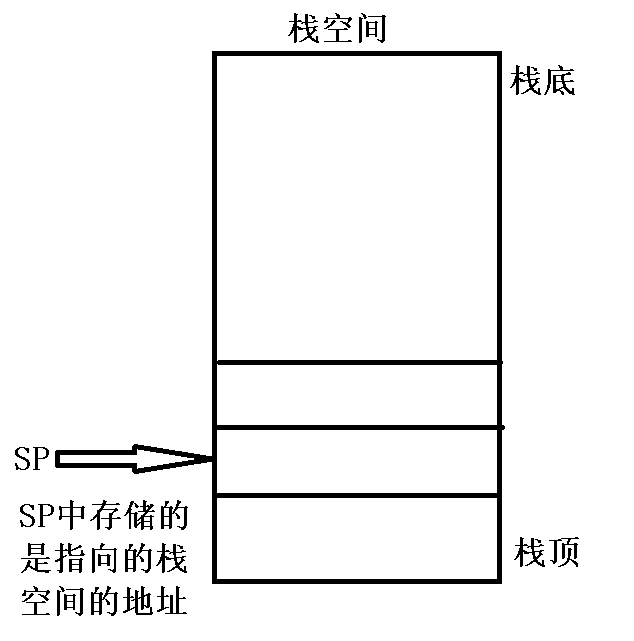
讯享网R13 ---> 别名:sp ---> the Stack Pointer 作用:SP寄存器中存储的是执行栈空间的地址。 栈空间主要用于压栈保存现场,出栈恢复现场。

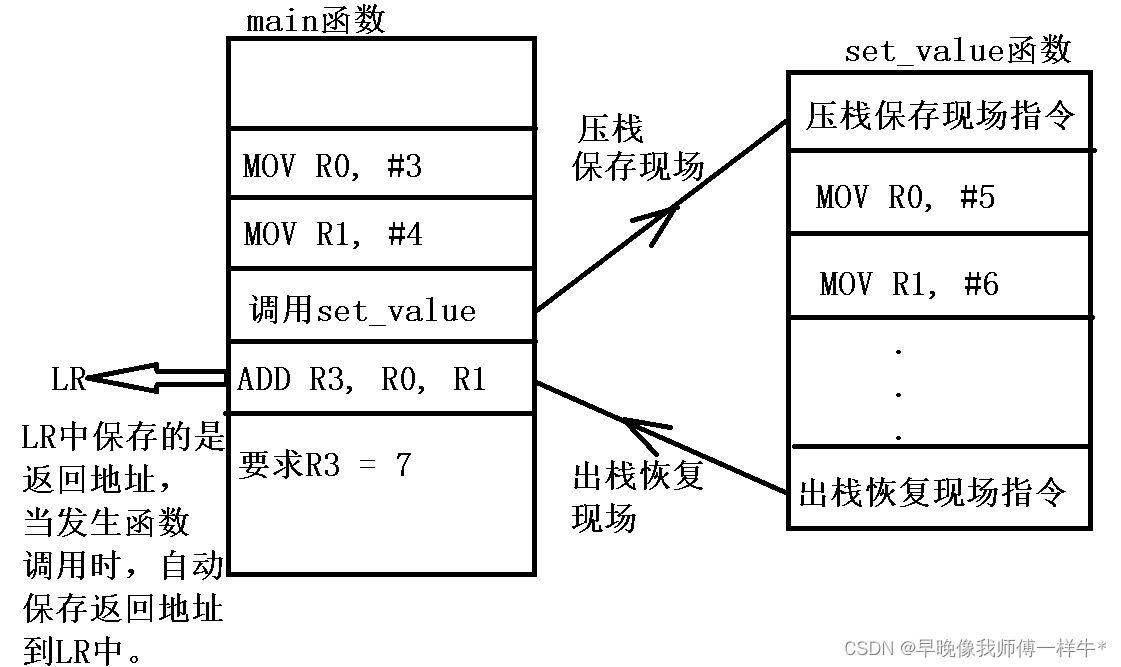
6.2 LR寄存器
6.3 PC寄存器
R15 ---> 别名:PC ---> The Program Counter : 程序计数寄存器 作用:PC寄存器中存储的是当前取指指令的地址, 每完成取指操作之后,PC会自动加4指向下一条指令。
6.4 CPSR 寄存器
讯享网CPSR : Current Program Statu Register : 当前程序状态寄存器 CPSR寄存器中存储的是当前处理器的运行的状态,比如:工作模式 所有的工作模式共用一个CPSR寄存器
6.5 SPSR 寄存器
SPSR : Save program Statu Register : 保存程序状态寄存器 SPSR寄存器主要用于对CPSR寄存器进行备份的。 每种异常模式下都有一个私有的SPSR寄存器。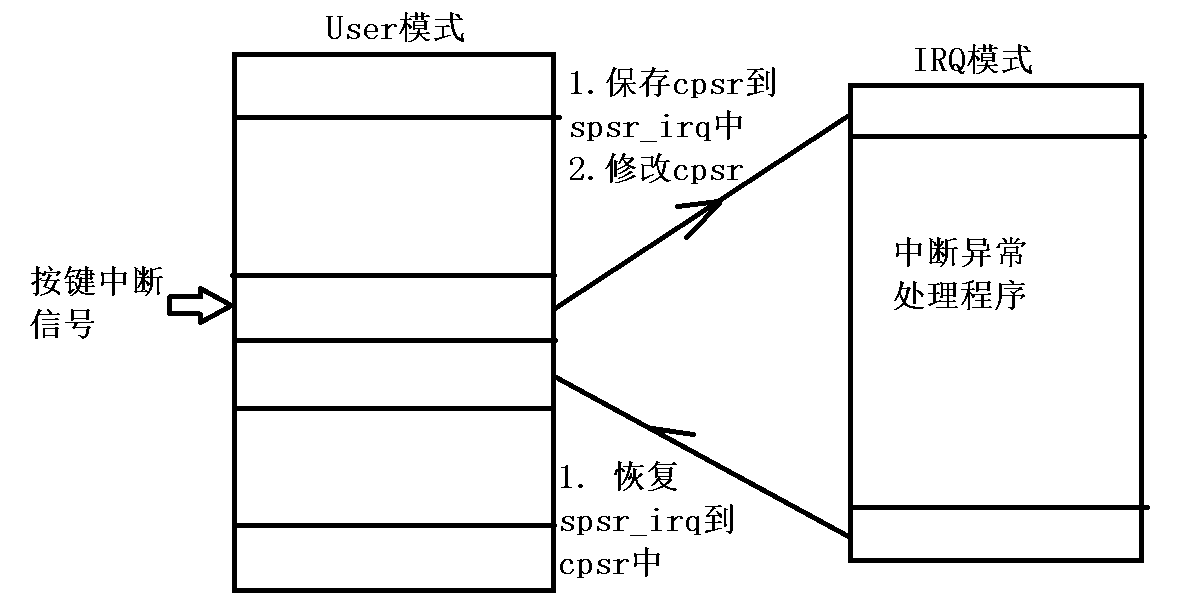
7、CPSR寄存器的详解

讯享网N[31] : 指令的运算结果为负数时, N位被自动置1,否则为0. Z[30] :指令的运算结果为零时, Z位被自动置1,否则为0. C[29] : 加法:低32位向高32位进位时,C位被自动置1,否则为0. 32位的处理器的寄存器为32位的,1条汇编指令本身就可以完成 32位以内数据的运算,如果数据超过32位之后,就需要考虑进位。 减法:低32位向高32位借位,C位被自动清0,否则为1. V[28] :符号位发生变化,V位被自动置1,否则为0. I[7] :IRQ屏蔽位 I = 1:屏蔽IRQ类型的中断 I = 0:不屏蔽IRQ类型的中断 F[6] :FIQ屏蔽位 F = 1:屏蔽FIQ类型的中断 F = 0:不屏蔽FIQ类型的中断 T[5] :状态位 T = 0 : ARM状态, 执行ARM汇编指令集 一条ARM汇编指令占4字节的代码段的空间 T = 1 : thumb状态,执行Thumb汇编指令集 一条Thumb汇编指令占2字节的代码段的空间。 M[4:0] :模式位 10000 User mode; 10001 FIQ mode; 10011 SVC mode; 10111 Abort mode; 11011 Undfined mode; 11111 System mode; 10110 Monitor mode; 10010 IRQ mode.
8、汇编指令流水线
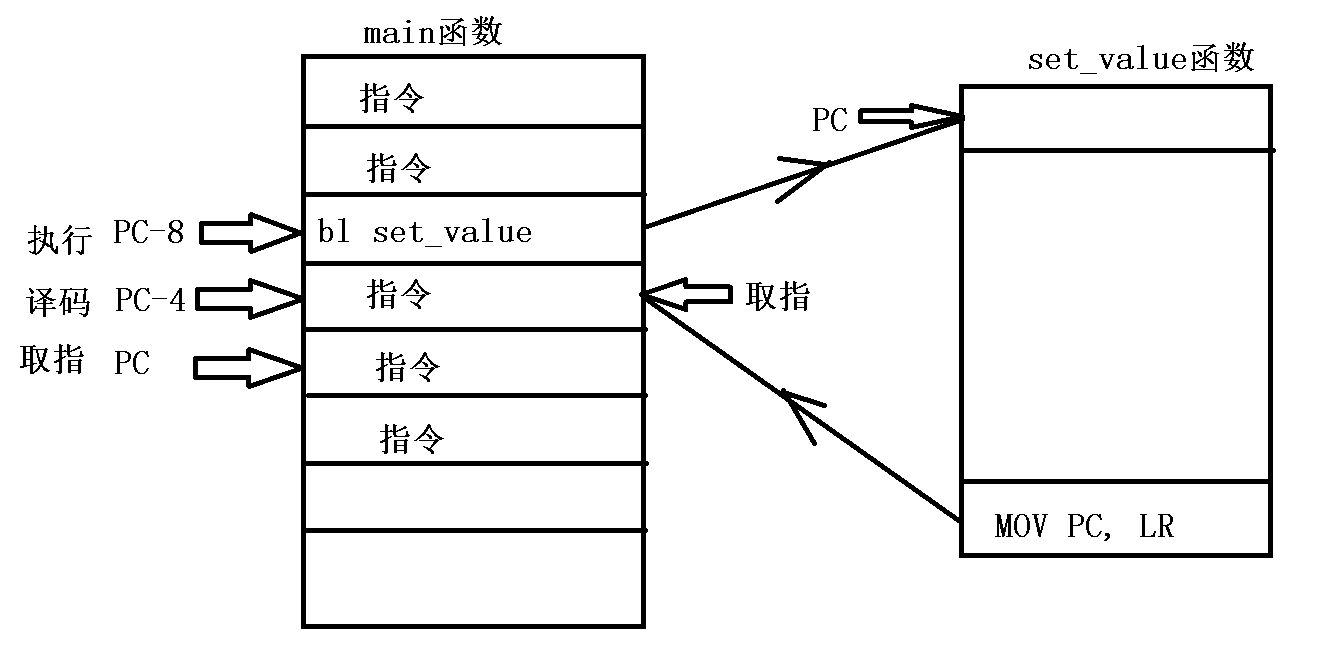
为了提高指令的执行的效率,指令的执行采用流水线的方式。 三级流水线 五级流水线 七级流水线 八级流水线 十三级流水线 重点理解三级流水线: 取指器:根据PC寄存器的指令的地址,从代码段取出指令对应的机器码。 译码器:翻译指令对应的机器码,将指令最终交给对应的执行器。 执行器:执行汇编指令,完成一个特定的功能,并将指令的执行结果写到寄存器中。 以上三个器件都是相互独立的器件,工作互不干扰,都属于单周期的器件。
讯享网执行1条汇编指令大概需要1个时钟周期:9 / 7 = 1 以上指令的指令是理想状态下的指令的流水线, 函数的调用,异常的处理会打断理想状态下的指令的流水线。
9、汇编指令流水线
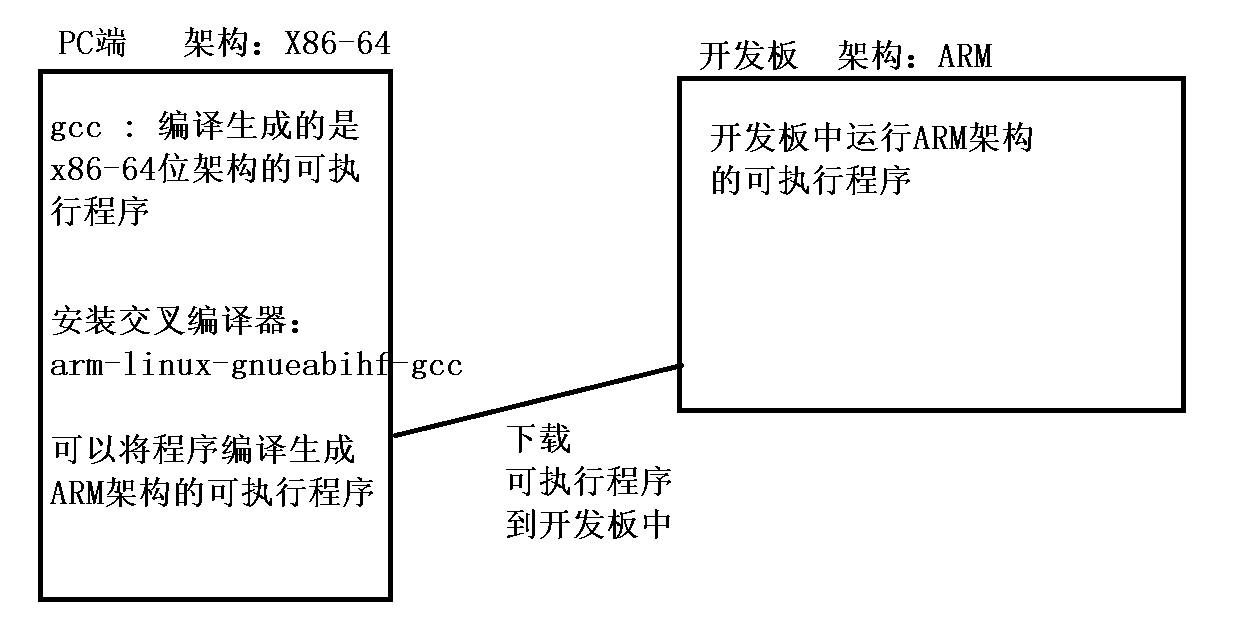
9.1 本地开发和交叉开发
本地开发 : PC端编写代码,PC端编译代码,PC端运行代码 交叉开发 : PC端编写代码,PC端编译代码,目标板运行代码 单片机开发就属于交叉开发: Keil工具编写代码,编译代码 ---> 烧录到开发板中运行程序 linux驱动开发板属于交叉开发: ubuntu中编写代码,编译代码 ---> 烧录到开发板中运行程序 PC : X86-64架构 ---> gcc编译器 ---> 编译生成x86-64架构的可执行程序 开发板 :arm架构 ---> 交叉编译器 ---> 编译生成ARM架构的可执行程序 9.2 ubuntu开发环境的搭建-》安装ARM交叉编译器
1> 在ubuntu的家目录下创建一个toolchain目录
讯享网 cd ~ mkdir toolchain
2> 拷贝交叉编译工具链的压缩包到toolchain目录下

cd ~/toolchains cp 拷贝交叉编译器到toolchains目录下 ./ 3> 对交叉编译器的压缩包进行解压缩
讯享网 tar -vxf gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabihf.tar 解压缩成功之后会得到gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabihf目录 将交叉编译器的目录简化: mv gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabihf gcc-7.5.0 交叉编译器在~/toolchain/gcc-7.5.0/bin目录下。 切记:不要在windows下进行解压缩,不支持软链接文件。

4> 配置PATH系统环境变量,将交叉编译器的路径添加到PATH环境变量中
/etc/profile /etc/environment /etc/bash.bashrc -----> 对所有的用户有效 ~/.bashrc -----> 只对当前用户有效 本次配置使用sudo vi /etc/bash.bashrc文件,打开此文件在最后一行添加以下内容: export PATH=$PATH:/home/linux/toolchain/gcc-7.5.0/bin |-----> 修改为自己的交叉编译器所在的路径 5> 使环境变量立即生效
讯享网 source /etc/bash.bashrc
6> 测试交叉编译器是否安装成功
arm-linux-gnueabihf-gcc -v arm-l(tab键) 出现以下提示信息表示安装成功: gcc version 7.5.0 (Linaro GCC 7.5-2019.12)二、ARM汇编指令
1.汇编工程文件的介绍
1.1 start.s文件介绍
讯享网.text @ 伪操作,不占用代码段的空间,给编译器使用 @ 告诉编译器,.text后边的内容为代码 .globl _start @ 伪操作 将_start声明为全局的函数 @ 可以被外部的文件使用 _start: @ 标签,类似于C语言的函数名,表示汇编函数的入口 @ 及标签可以表示标签下的第一条汇编指令的地址 mov r0, #0xFF @ 汇编指令 编译器可以将其编译生成32位的机器码 @ 执行汇编指令的机器码可以完成特定的功能 @ mov是一个赋值的汇编指令 @ R0 = 0xFF stop: @ 标签 b stop @ 跳转指令,跳转到stop标签下的第一条指令 @ 等价于while(1){}死循环 /* 在裸机开发中,必须在主函数中编译一个while(1){} 死循环,否则程序会跑飞,执行的结果不可预知。 在while(1){}死循环中轮询的处理各种事件。 */ .end @ 伪操作,代码段结束
1.2 map.lds文件的介绍
/* map.lds : 链接脚本文件,给编译器使用, 编译器解析链接脚本文件,最终决定对代码的配置和链接。 */ /* 输出格式 : ELF格式 32位 小端对齐 ARM架构可执行程序 */ OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm") /*OUTPUT_FORMAT("elf32-arm", "elf32-arm", "elf32-arm")*/ /* 输出架构 (ARM架构)*/ OUTPUT_ARCH(arm) /* 程序的入口 */ ENTRY(_start) SECTIONS /* 段 */ { . = 0x00000000; /* 代码的入口地址 */ . = ALIGN(4); /* 对齐 */ .text : /* 代码段 */ { ./Objects/start.o(.text) /* start.o文件必须放到代码段最开始的位置,start.s生成start.o*/ *(.text) /* 其他的.o文件 编译器看着排布 */ } . = ALIGN(4); .rodata : /* 只读数据段 */ { *(.rodata) /* 常量 只读数据*/ } . = ALIGN(4); .data : /* 数据段 */ { *(.data) /* 初始化的全局变量,或者使用static修饰的初始化的变量 */ } . = ALIGN(4); __bss_start = .; .bss : /* bss段 */ { *(.bss) /* 未初始化的全局变量,或者使用static修饰的未初始化的变量 */ } __bss_end__ = .; }2.汇编文件中的符号
讯享网1. 伪操作:伪操作不占用代码段的空间,给编译器使用, 比如.text .global .globl .end .data .if .else .endif .... 注:编译器不同,汇编文件中的伪操作书写方式不同。 2. 汇编指令:编译器可以将汇编指令编译生成机器码,执行汇编指令可以完成特定的功能。 比如:mov r0, #0xFF ===> r0 = 0xFF 3. 伪指令:伪指令本身不是一条汇编指令,编译器可以将伪指令编译生成多条汇编指令, 共同完成一条伪指令的功能。 4. 注释: 单行注释:@ 多行注释:// .if 0/1 .else .endif 注:编译器不同,汇编文件中的单行注释方式不同。
3.汇编指令的分类
1. 数据操作指令 1> 数据搬移指令 2> 移位操作指令 3> 算数运算指令 4> 位运算指令 5> 比较指令 2. 跳转指令 3. Load/Store内存读写指令 1> 单寄存器操作指令 2> 多寄存器操作指令 3> 栈操作指令 4. 特殊功能寄存器操作指令 5. 软中断指令4.汇编指令的基本的语法格式
讯享网<opcode>{cond}{S} Rd, Rn, shifter_oprand 解释: <opcode> :指令码(指令名字), 比如:mov,add,sub.... {cond} :条件码, 实现汇编指令的有条件的执行,后续讲解比较指令时详细解释。 {S} :状态位, 加S,指令的执行结果影响CPSR的NZCV位, 不加S,指令的执行结果不影响CPSR的NZCV位。 Rd :目标寄存器,存放指令的执行的结果 Rn :第一个操作寄存器,只能是一个普通的寄存器, 等价于运算符的左操作数 shifter_oprand:第二个操作数, 等价于运算符的右操作数 1> 可以是一个普通的寄存器 2> 可以是一个立即数 3> 可以是一个移位操作的寄存器 <opcode>{cond}{S}:这三部分书写时,连到一起写即可。 Rd, Rn, shifter_oprand:这三部分书写时,使用英文逗号隔开 <opcode>和Rd之间使用空格隔开 一条汇编指令单独占一行,汇编文件中不严格区分大小写:
5.数据操作指令
5.1 移位操作指令
5.1.1 指令码
mov : 直接赋值 mvn :按位取反之后再进行赋值操作 5.1.2 指令格式
讯享网mov{cond}{S} Rd, shifter_oprand @ Rd = shifter_oprand mvn{cond}{S} Rd, shifter_oprand @ Rd = ~shifter_oprand 数据搬移指令没有第一个操作寄存器
5.1.3 指令测试代码
/*1. 数据搬移指令 */ @ 第二个操作数为一个立即数,立即数前需要加# mov r0, #0xFF @ 功能:R0 = 0xFF @ 第二个操作数为一个普通的寄存器 mov r1, r0 @ 功能:R1 = R0 mvn r2, #0xFF @ 功能:r2 = ~0xFF = 0xFFFFFF00 5.1.4 立即数的概念
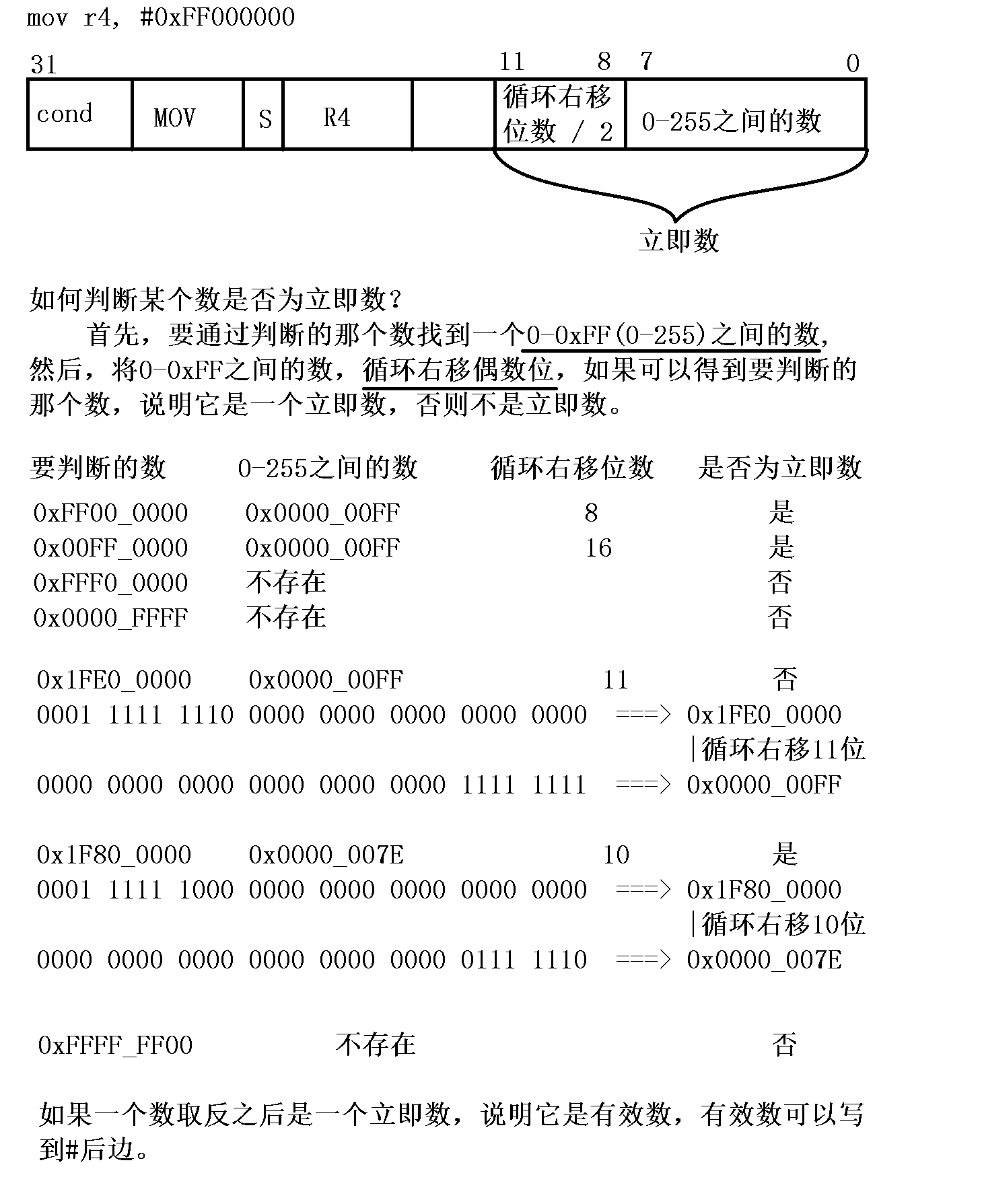
讯享网 mov r0, #0xFF @ mov r1, #0xFFF @ mov r2, #0xFFFF mov r3, #0x00FFFFFF mov r4, #0xFF000000 mov r4, #0x00FF0000 mov r5, #0x1F
立即数的概念不需要记忆,不同的汇编指令,立即数占用的位数也是不同的。 5.1.5 ldr伪指令
讯享网格式: ldr Rd, =number @ Rd = number
ldr r0, =0x5.2 移位操作指令
5.2.1 指令码
讯享网lsl : 逻辑左移/无符号数左移 lsr : 逻辑右移/无符号数右移 asr : 算数右移/有符号数右移 ror : 循环右移
5.2.2 指令格式
<opcode>{cond}{S} Rd, Rn, shifter_oprand 5.2.3 指令测试代码
讯享网/* 2. 移位操作指令 */ mov r0, #0xFF @ 逻辑左移:高位移出,低位补0 lsl r1, r0, #4 @ r1 = r0 << 4 = 0xFF0 @ 逻辑右移:低位移出,高位补0 lsr r2, r0, #4 @ r2 = r0 >> 4 = 0xF @ 算数右移:低位移出,高位补符号位 asr r3, r0, #4 @ r3 = r0 >> 4 = 0xF @ 循环右移:低位移出,补到高位 ror r4, r0, #4 @ r4 = r0 >> 4 = 0xF000000F @ mov r0, #-1 @ r0 = 0xFFFFFFFF @ 算数右移:低位移出,高位补符号位 asr r5, r0, #4 @ 第二个操作数是一个经过移位的寄存器 mov r0, #0xFF mov r1, r0, lsl #4 @ r1 = r0 << 4 = 0xFF0
5.3 位运算指令(重要!重要!重要!)
5.3.1 指令码
and : 按位与运算(&) orr : 按位或运算(|) eor : 按位异或运算(^) bic : 按位清除运算 与0清0,与1不变 或1置1,或0不变 异或1取反,异或0不变 | 左操作数 | 运算符 | 右操作数 | 结果 |
|---|---|---|---|
| 0 | & | 0 | 0 |
| 1 | & | 0 | 0 |
| 0 | & | 1 | 0 |
| 1 | & | 1 | 1 |
| 左操作数 | 运算符 | 右操作数 | 结果 |
|---|---|---|---|
| 0 | | | 0 | 0 |
| 1 | | | 0 | 1 |
| 0 | | | 1 | 1 |
| 1 | | | 1 | 1 |
| 左操作数 | 运算符 | 右操作数 | 结果 |
|---|---|---|---|
| 0 | ^ | 0 | 0 |
| 1 | ^ | 0 | 1 |
| 0 | ^ | 1 | 1 |
| 1 | ^ | 1 | 0 |
5.3.2 指令格式
讯享网<opcode>{cond}{S} Rd, Rn, shifter_oprand
5.3.3 指令测试代码
/* 3. 位运算指令 */ @ 假设R0寄存器有一个默认值,对R0寄存器的某些位进行操作 ldr r0, =0x @31 0 @ @ 1> 将R0寄存器中的值的第[3]位清0,保持其他位不变 @ r0 = r0 & 0xFFFFFFF7; <===> r0 = r0 & (~(0x1 << 3)); and r0, r0, #0xFFFFFFF7 @ <==> and r0, r0, #(~(0x1 << 3)) @ 2> 将r0寄存器中的值的第[29]位置1,保持其他位不变 orr r0, r0, #(0x1 << 29) @ 3> 将R0寄存器中的值的第[7:4]位清0,保持其他位不变 and r0, r0, #(~(0xF << 4)) @ 4> 将R0寄存器中的值的第[15:8]位置1,保持其他位不变 orr r0, r0, #(0xFF << 8) @ 5> 将R0寄存器中的值的第[3:0]位按位取反,保持其他位不变 eor r0, r0, #(0xF << 0) @ 6> 将R0寄存器中的值的第[11:4]位修改为,保持其他位不变 @ 6.1> 先整体清0 and r0, r0, #(~(0xFF << 4)) @ 6.2> 再将对应的位置1 orr r0, r0, #(0xAB << 4) @ 6.1> 先整体置1 orr r0, r0, #(0xFF << 4) @ 6.2> 再将对应的位清0 @ ===》 0 and r0, r0, #(~(0x54 << 4)) @ bic 指令: 按位清0的指令 @ 第二个操作数的哪位为1,就将第一个操作寄存器中的数据的哪位清0, @ 然后将结果写回到目标寄存器中 bic r0, r0, #0xFF @ <==> and r0, r0, #(~0xFF) 5.4 算数运算指令
5.4.1 指令码
讯享网add :普通的加法指令,不需要考虑进位标志位(C位) adc :带进位的加法指令, 需要考虑进位标志位(C位) sub :普通的减法指令,不需要考虑借位标志位(C位) sbc :带借位的减法指令,需要考虑借位标志位(C位) mul : 乘法指令 div :除法指令, ARM-v8之后的架构才支持除法指令
5.4.2 指令格式
<opcode>{cond}{S} Rd, Rn, shifter_oprand 5.4.3 指令测试代码
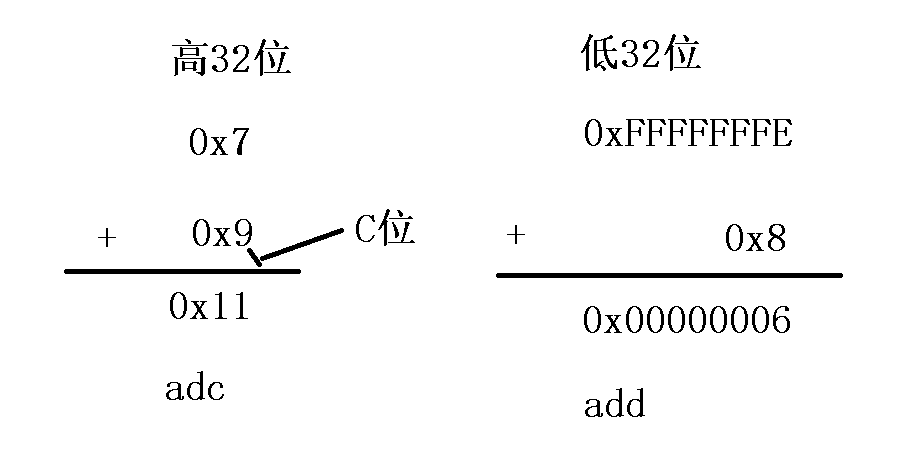
讯享网 @ 案例1:实现两个64位数相加 @ r0和R1存放第1个64位的数 @ r2和r3存放第2个64位的数 @ r4和r5存放运算的结果 @ 第一步:准备两个64位的整数 mov r0, #0xFFFFFFFE @ 第1个数的低32位 mov r1, #0x7 @ 第1个数的高32位 mov r2, #0x8 @ 第2个数的低32位 mov r3, #0x9 @ 第2个数的高32位 adds r4, r0, r2 @ r4 = r0 + r2 = 0x00000006 adc r5, r1, r3 @ r5 = r1 + r3 + C = 0x11

@ 案例2:实现两个64位数相减 @ r0和R1存放第1个64位的数 @ r2和r3存放第2个64位的数 @ r4和r5存放运算的结果@ 算数运算指令 mov r0, #0x6 @ 第1个数的低32位 mov r1, #0x7 @ 第1个数的高32位 mov r2, #0x8 @ 第2个数的低32位 mov r3, #0x3 @ 第2个数的高32位 subs r4, r0, r2 @ r4 = r0 - r2 = 0xFFFFFFFE sbc r5, r1, r3 @ r5 = r1 - r3 - !C = 0x3 讯享网 @ 乘法指令 mul mov r0, #3 mov r1, #4 mul r2, r0, r1 @ r2 = r0 * r1 = 0xC @ 乘法指令的第二个操作数只能是一个寄存器 @ mul r3, r2, #2 @ error
5.5 比较指令
5.5.1 指令码
cmp 5.5.2 指令格式
讯享网 cmp Rn, shifter_oprand 1. cmp指令没有目标寄存器,只有第一个操作寄存器和第二个操作数 2. cmp指令就是用于比较两个数的大小,本质就是进行减法运算。 Rn - shifter_oprand 3. cmp指令的执行结果最终会影响CPSR的NZCV位,并且不需要加S. 4. cmp指令经常和条件码配合使用,实现汇编指令的有条件执行。 5. 条件码可以实现汇编指令的有条件执行

5.5.3 参考案例
/* 5. 比较指令 */ mov r0, #9 mov r1, #15 /* 比较r0和r1寄存器中的值的大小: 如果r0>r1 ,则 r0 = r0 - r1 如果r0<r1 , 则 r1 = r1 - r0 如果r0=r1 , 则 r0 = r1 */ cmp r0, r1 @ 本质:r0-r1, 结果影响NZCV位 @ 指令码后边添加条件码的注记符之后, @ 指令会自动的判断NZCV的值,如果符合要求 @ 则执行对应的指令,如果不满足要求,则不执行指令 moveq r0, r1 @ r0=r1 subhi r0, r0, r1 @ r0>r1 subcc r1, r1, r0 @ r0<r1 6、跳转指令
6.1 指令码
讯享网 b : 不保存返回地址的跳转指令 bl : 保存返回地址的跳转指令
6.2 指令格式
b/bl{cond} Label(函数名) Label: ---> 标签表示汇编函数的入口地址 函数体 b: 跳转到Label标签下的第一条指令,不保存返回地址到LR中 b跳转指令的使用场合:有去无回就用b跳转指令, 比如: stop: ..... b stop bl: 跳转到Label标签下的第一条指令,同时保存返回地址到LR中 bl跳转指令的使用场合:有去有回就用bl跳转指令 比如:函数的调用 跳转指令的本质就是修改PC值,修改PC所指向的汇编指令。 6.3 指令测试代码
讯享网/*6. 跳转指令 */ @ 案例:封装函数,实现交换两个寄存器中的值 mov r0, #9 mov r1, #15 @ 使用bl指令调用函数 @ 自动保存返回地址到LR中 bl swap_func nop @ 控制器,占位,没有任何的含义 @ LR寄存器中保存的是nop指令的地址 .if 0 b stop @ 不需要保存返回地址,使用b跳转指令 .else ldr pc, =stop .endif swap_func: eor r0, r0, r1 eor r1, r0, r1 eor r0, r0, r1 mov pc, lr @ 函数的返回 stop: b stop
6.4 实现跳转的其他的方式
b label bl label mov pc, lr @ 一般用于函数的返回 ldr pc, =label @ 等价于b label mov pc, #label @ 要求:label标签标识的地址必须是一个立即数 @ 此种用法不建议使用 6.5 综合练习题:求两个数的最大公约数

讯享网mov r0,#0x9 mov r1,#0x15 AAA: cmp r0,r1 bEQ stop subHI r0,r0,r1 subCC r1,r1,r0 b AAA stop: b stop
7、特殊功能寄存器操作指令
7.1 指令码
msr mrs 特殊功能寄存器操作指令是对cpsr寄存器进行读写操作的。 7.2 指令格式
讯享网 msr cpsr, Rn @ 将Rn寄存器中的值赋值给CPSR寄存器 mrs Rd, cpsr @ 将CPSR寄存器中的值赋值给Rd寄存器
7.3 指令测试代码
用切换模式的方式验证这两条指令
/* 系统上电,默认工作在SVC模式下 此时CPSR的M[4:0]位 = 0b10011, 修改CPSR寄存器的M位,从SVC模式切换到用户模式 用户模式CPSR的M[4:0]位 = 0b10000, 操作CPSR寄存器时,只修改M位,其他位保持不变 */ @ 方式1:直接给CPSR寄存器赋值 .if 0 msr cpsr, #0xD0 @ 0b1101 0000 .elif 0 mov r0, #0xD0 msr cpsr, r0 .endif @ 方式2:间接修改CPSR的M位 mrs r0, cpsr @ 先读到普通寄存器中 bic r0, r0, #0x1F @ 对普通寄存器清0(只给要改的位清零) orr r0, r0, #0x10 @ 将对应的位置1 msr cpsr, r0 @ 将结果写回到cpsr中 8、Load/Store内存读写指令
8.1 单寄存器操作指令(重要!重要!重要!)
8.1.1 指令码
讯享网ldr ---> 将内存地址中的数据读到寄存器中,读4字节 str ---> 将寄存器中的数据写到内存地址中,写4字节 ldrh ---> 将内存地址中的数据读到寄存器中,读2字节 strh ---> 将寄存器中的数据写到内存地址中,写2字节 ldrb ---> 将内存地址中的数据读到寄存器中,读1字节 strb ---> 将寄存器中的数据写到内存地址中,写1字节 ld : load st:store r:register h : half b : byte
8.1.2 指令格式
ldr/ldrh/ldrb Rd, [Rm] [Rm] : Rm寄存器中的数据被当成一个地址看待 将Rm指向的地址空间的数据读到Rd寄存器中。 int a = 100; int *p = &a; p <==> [Rm] int b = *p; <==> ldr Rd, [Rm] str/strh/strb Rn, [Rm] [Rm] : Rm寄存器中的数据被当成一个地址看待 将Rn寄存器中的数据写到Rm指向的地址空间中 int a = 100; int b = 200; int *p = &a; p <==> [Rm] *p = b; <==> str Rn, [Rm] 8.1.3 指令测试代码
讯享网 ldr r0, =0x @ 准备内存的地址 ldr r1, =0x @ 准备数据 @ 将r1中的数据写到r0指向的地址空间中 str r1, [r0] @ 将r0指向的地址空间中的数据读到r2中 ldr r2, [r0]
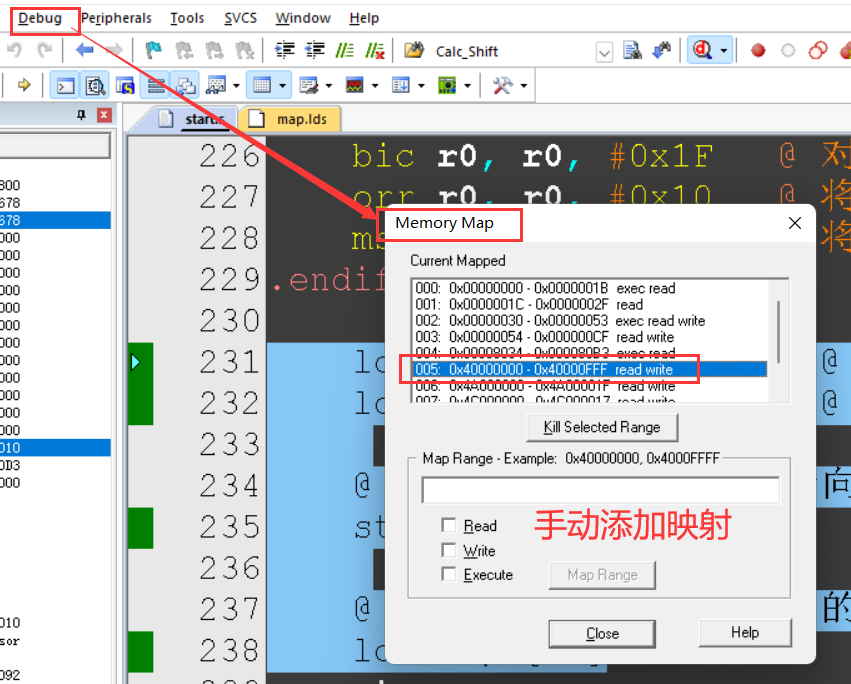
问题1:为什么使用0x内存地址,可否使用其他地址?

被映射后有可读可写的权限,可以自己映射,但重新启动以后又需要重新映射
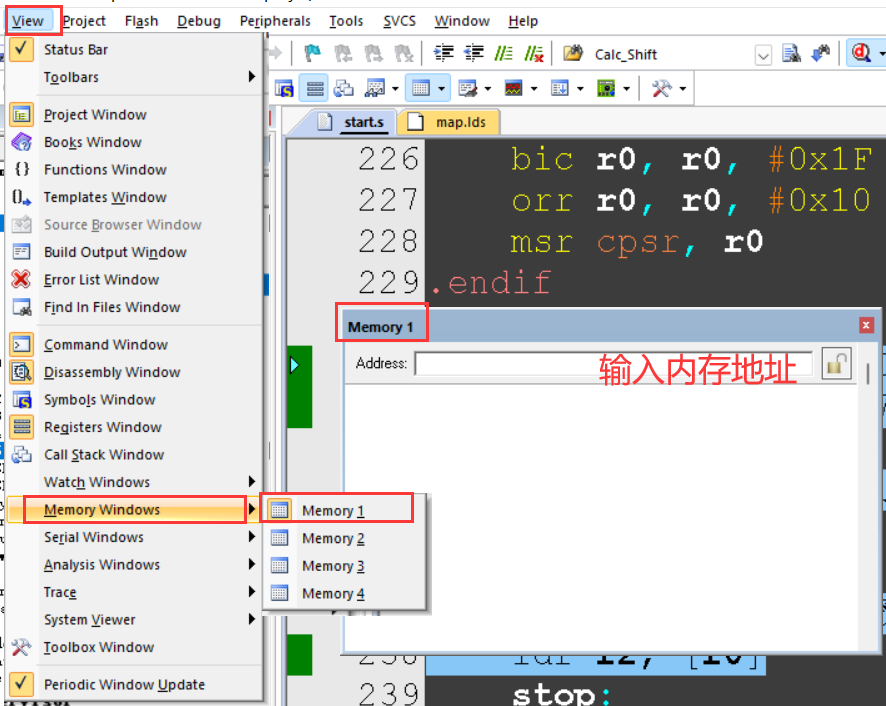
问题2:如何查看内存中的数据?
8.1.4 单寄存器操作指令的语法扩展
ldr/ldrh/ldrb Rd, [Rm, #offset] 将Rm+offset指向地址空间中的数据读到Rd寄存器中, Rm寄存器中存储的地址不变 ldr/ldrh/ldrb Rd, [Rm], #offset 将Rm指向的地址空间中的数据读到Rd寄存器中, 同时,更新Rm指向的地址空间,Rm = Rm + offset ldr/ldrh/ldrb Rd, [Rm, #offset]! 将Rm+offset指向的地址空间中的数据读到Rd寄存器中, 同时,更新Rm指向的地址空间,Rm = Rm + offset ! : 作用:更新Rm指向的地址空间 str/strh/strb同样支持以上三种不同的用法。 讯享网 ldr r0, =0x @ 准备地址 这里都是用伪指令赋值 ldr r1, =0x @ 准备数据 ldr r2, =0x ldr r3, =0x @ 将r1中的数据写到r0+4指向的地址空间中, @ R0寄存器中存储的地址不变 @ [0x] = 0x R0 = 0x str r1, [r0, #4] @ 将r2中的数据写到r0指向的地址空间中, @ 同时,更新r0中的地址,r0 = r0 + 4 @ [0x] = 0x R0 = 0x str r2, [r0], #4 @ 将r3中的数据写到r0+4指向的地址空间中, @ 同时,更新r0中的地址,r0 = r0 + 4 @ [0x] = 0x R0 = 0x str r3, [r0, #4]!
@ 练习题: ldr r0, =0x @ 准备地址 ldr r1, =0x @ 准备数据 str r1, [r0] @ 将r1中的数据写到r0指向的地址空间中 @ 使用ldrb指令按照字节的方式,将每个字节中的数据读到r2-r5寄存器中 ldrb r2, [r0, #0] ldrb r3, [r0, #1] ldrb r4, [r0, #2] ldrb r5, [r0, #3] ldrb r2, [r0], #1 ldrb r3, [r0], #1 ldrb r4, [r0], #1 ldrb r5, [r0], #1 ldr r0, =0x @ 更新r0中的地址 ldrb r2, [r0,#0]! ldrb r3, [r0,#1]! ldrb r4, [r0,#1]! ldrb r5, [r0,#1]! 8.2 多寄存器操作指令
8.2.1 指令码
讯享网 stm ldm m :multi
8.2.2 指令格式
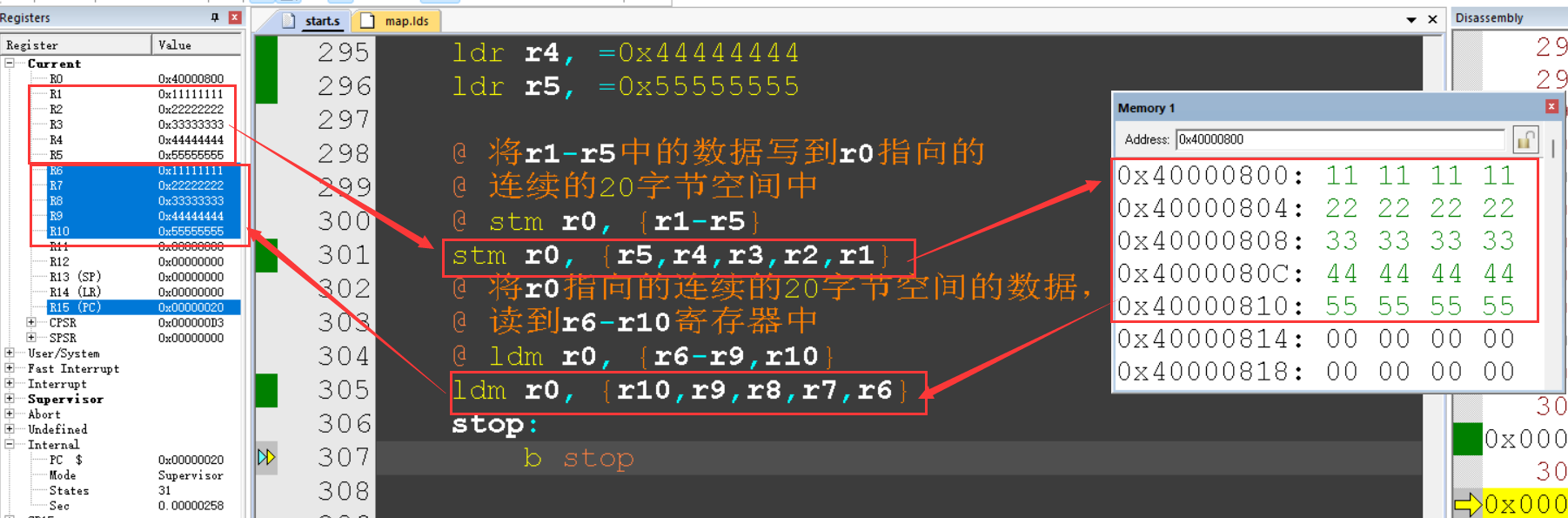
stm Rm, {寄存器列表} Rm寄存器中的数据将被当成内存的地址看待 将寄存器列表中的所有的寄存器中的数据,写到Rm指向的连续的地址空间中 ldm Rm, {寄存器列表} Rm寄存器中的数据将被当成内存的地址看待 将Rm指向的连续的地址空间的数据,读到寄存器列表的每个寄存器中。 寄存器列表的书写格式: 1> 如果寄存器的编号连续,则使用“-”隔开 比如:r1-r5 2> 如何寄存器的编号不连续,则使用“,”隔开 比如:r1-r4,r7,r9 3> 寄存器列表中的寄存器要求从小到大的编号进行书写 比如: r1-r4,r7,r9 : Ok, 编译可以通过 r4-r1 : Error, 编译报错 r4,r3,r2,r1 : Ok, 编译会报警告 4> 不管寄存器列表中的寄存器的顺序如何书写, 永远都是小编号的寄存器对应的使低地址, 大编号的寄存器对应的是高地址。 8.2.3 指令测试代码
讯享网 ldr r0, =0x @ 准备地址 ldr r1, =0x @ 准备数据 ldr r2, =0x ldr r3, =0x ldr r4, =0x ldr r5, =0x @ 将r1-r5中的数据写到r0指向的 @ 连续的20字节空间中 @ stm r0, {r1-r5} stm r0, {r5,r4,r3,r2,r1} @ 将r0指向的连续的20字节空间的数据, @ 读到r6-r10寄存器中 @ ldm r0, {r6-r9,r10} ldm r0, {r10,r9,r8,r7,r6}

8.3 栈操作指令
8.3.1 栈的种类
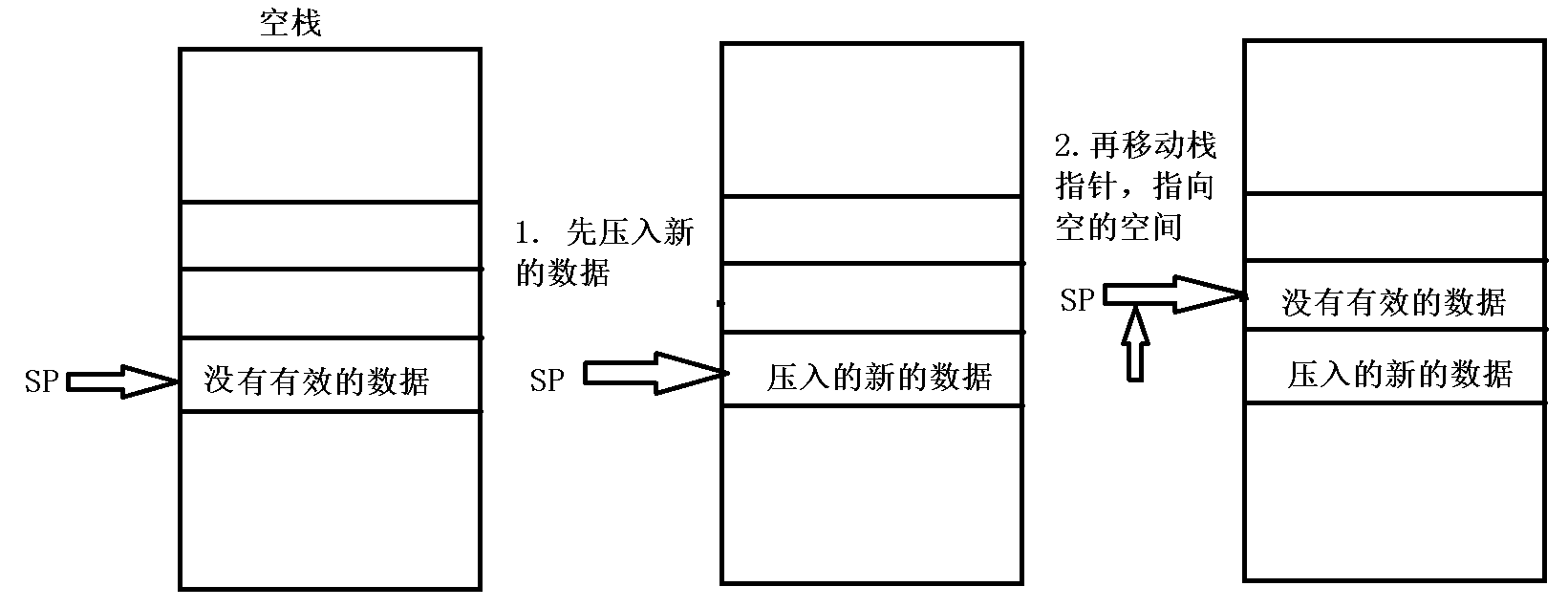
增栈:压栈之后,栈指针向高地址方向移动。 减栈:压栈之后,栈指针向低地址方向移动。 满栈:当前栈指针指向的栈空间有有效的数据,需要先移动栈指针, 指向一个没有有效数据的空间之后,然后再压入新的数据, 此时栈指针指向的空间依然有有效数据,因此再次压入数据时, 依然要先移动栈指针再压入新的数据。 空栈:当前栈指针指向的空间没有有效的数据,可以先压入数据, 然后再移动栈指针指向一个没有有效数据的空间, 因此载入压入数据时,可以先押入数据再移动栈指针。 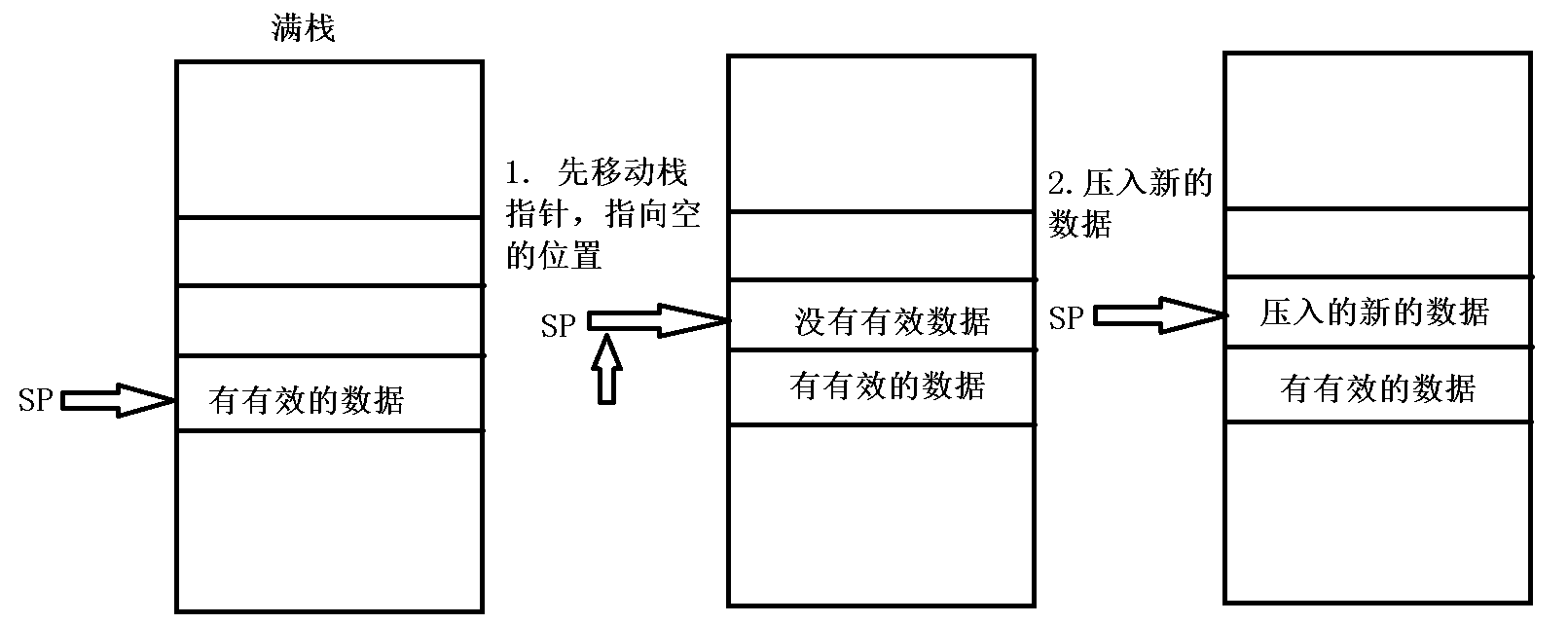

8.3.2 栈的操作方式
讯享网满增栈 :Full Ascending 满减栈 :Full Descending 空增栈 :Empty Ascending 空减栈 :Empty Descending
8.3.3 栈的读写指令
满增栈 :Full Ascending stmfa/ldmfa 满减栈 :Full Descending stmfd/ldmfd 空增栈 :Empty Ascending stmea/ldmea 空减栈 :Empty Descending stmed/ldmed ARM处理器规定默认使用的是满减栈。 8.3.4 指令的语法格式
讯享网stmfd sp!, {寄存器列表} 将寄存器列表中的所有的寄存器的数据,压栈到SP指向的连续的栈空间中, ! : 同时更新栈指针指向的地址 ldmfd sp!, {寄存器列表} 将栈指针指令的连续的栈空间的数据,出栈到寄存器列表的每个寄存器中, ! : 同时更新栈指针指向的地址 寄存器列表的书写格式: 1> 如果寄存器的编号连续,则使用“-”隔开 比如:r1-r5 2> 如何寄存器的编号不连续,则使用“,”隔开 比如:r1-r4,r7,r9 3> 寄存器列表中的寄存器要求从小到大的编号进行书写 比如: r1-r4,r7,r9 : Ok, 编译可以通过 r4-r1 : Error, 编译报错 r4,r3,r2,r1 : Ok, 编译会报警告 4> 不管寄存器列表中的寄存器的顺序如何书写, 永远都是小编号的寄存器对应的使低地址, 大编号的寄存器对应的是高地址。
8.3.5 指令的测试代码
@ 初始化栈指针 ldr sp, =0x mov r0, #3 mov r1, #4 bl set_Value add r2, r0, r1 @ r2 = r0 + r1 = 0x7 b stop set_Value: stmfd sp!, {r0-r1,LR} @ 压栈保存现场 mov r0, #5 mov r1, #6 bl add_func ldmfd sp!, {r0-r1,PC} @ 出栈恢复现场 @ mov pc, lr add_func: stmfd sp!, {r0-r1} @ 压栈保存现场 mov r0, #7 mov r1, #8 add r3, r0, r1 ldmfd sp!, {r0-r1} @ 出栈恢复现场 mov pc, lr 8.3 栈操作指令
8.3.1 栈的种类
讯享网增栈:压栈之后,栈指针向高地址方向移动。 减栈:压栈之后,栈指针向低地址方向移动。 满栈:当前栈指针指向的栈空间有有效的数据,需要先移动栈指针, 指向一个没有有效数据的空间之后,然后再压入新的数据, 此时栈指针指向的空间依然有有效数据,因此再次压入数据时, 依然要先移动栈指针再压入新的数据。 空栈:当前栈指针指向的空间没有有效的数据,可以先压入数据, 然后再移动栈指针指向一个没有有效数据的空间, 因此载入压入数据时,可以先押入数据再移动栈指针。

8.3.2 栈的操作方式
满增栈 :Full Ascending 满减栈 :Full Descending 空增栈 :Empty Ascending 空减栈 :Empty Descending 8.3.3 栈的读写指令
讯享网满增栈 :Full Ascending stmfa/ldmfa 满减栈 :Full Descending stmfd/ldmfd 空增栈 :Empty Ascending stmea/ldmea 空减栈 :Empty Descending stmed/ldmed ARM处理器规定默认使用的是满减栈。
8.3.4 指令的语法格式
stmfd sp!, {寄存器列表} 将寄存器列表中的所有的寄存器的数据,压栈到SP指向的连续的栈空间中, ! : 同时更新栈指针指向的地址 ldmfd sp!, {寄存器列表} 将栈指针指令的连续的栈空间的数据,出栈到寄存器列表的每个寄存器中, ! : 同时更新栈指针指向的地址 寄存器列表的书写格式: 1> 如果寄存器的编号连续,则使用“-”隔开 比如:r1-r5 2> 如何寄存器的编号不连续,则使用“,”隔开 比如:r1-r4,r7,r9 3> 寄存器列表中的寄存器要求从小到大的编号进行书写 比如: r1-r4,r7,r9 : Ok, 编译可以通过 r4-r1 : Error, 编译报错 r4,r3,r2,r1 : Ok, 编译会报警告 4> 不管寄存器列表中的寄存器的顺序如何书写, 永远都是小编号的寄存器对应的使低地址, 大编号的寄存器对应的是高地址。 8.3.5 指令的测试代码
讯享网 @ 初始化栈指针 ldr sp, =0x mov r0, #3 mov r1, #4 bl set_Value add r2, r0, r1 @ r2 = r0 + r1 = 0x7 b stop set_Value: stmfd sp!, {r0-r1,LR} @ 压栈保存现场 mov r0, #5 mov r1, #6 bl add_func ldmfd sp!, {r0-r1,PC} @ 出栈恢复现场 @ mov pc, lr add_func: stmfd sp!, {r0-r1} @ 压栈保存现场 mov r0, #7 mov r1, #8 add r3, r0, r1 ldmfd sp!, {r0-r1} @ 出栈恢复现场 mov pc, lr
9、软中断指令
9.1 指令码
swi 9.2 指令格式
讯享网 swi{cond} 软中断号 软中断号的范围为:0 ~ 2^24-1 后续讲解异常处理过程时,讲解软中断指令
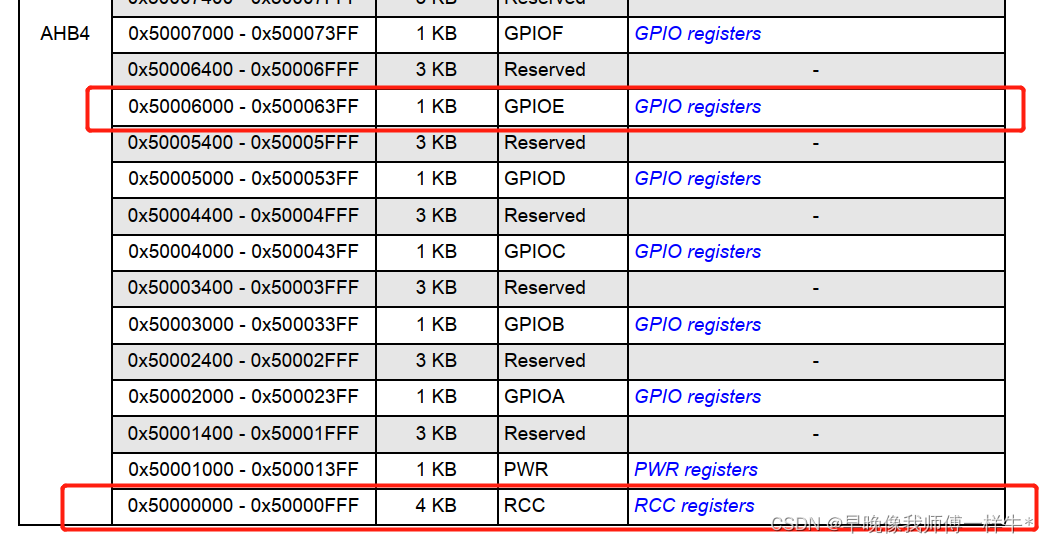
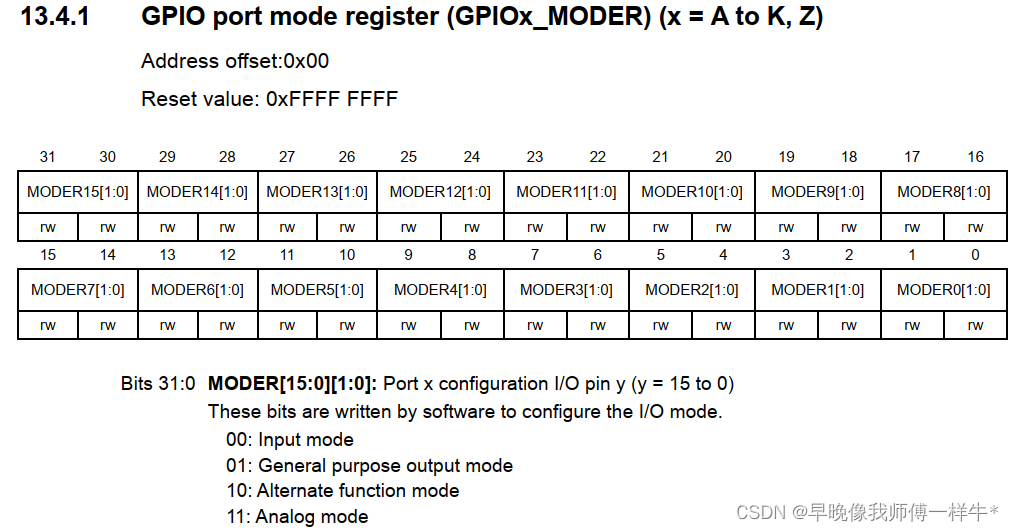
实验一、点亮LED
流程:
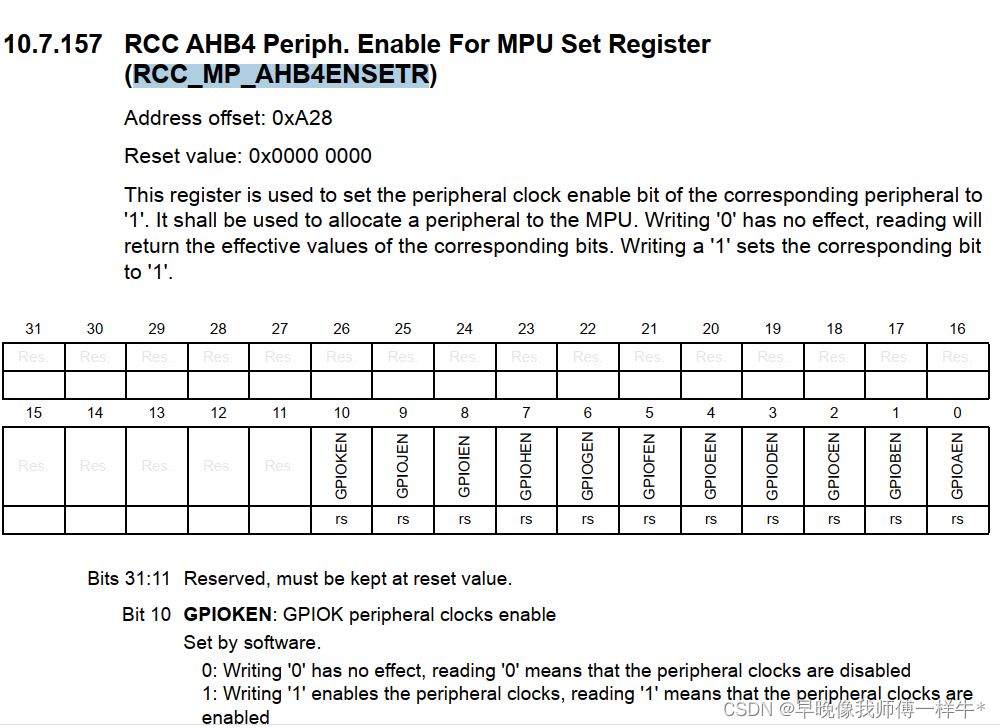
使能时钟
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/122857.html