
写在前面,这篇文章是借鉴Drexel University 的Senior Design project的matlab simulink四旋翼模型,在此基础上针对六旋翼进行的基本改进,这里只对“+”型模型进行了改造,学习追溯帖。
数学模型
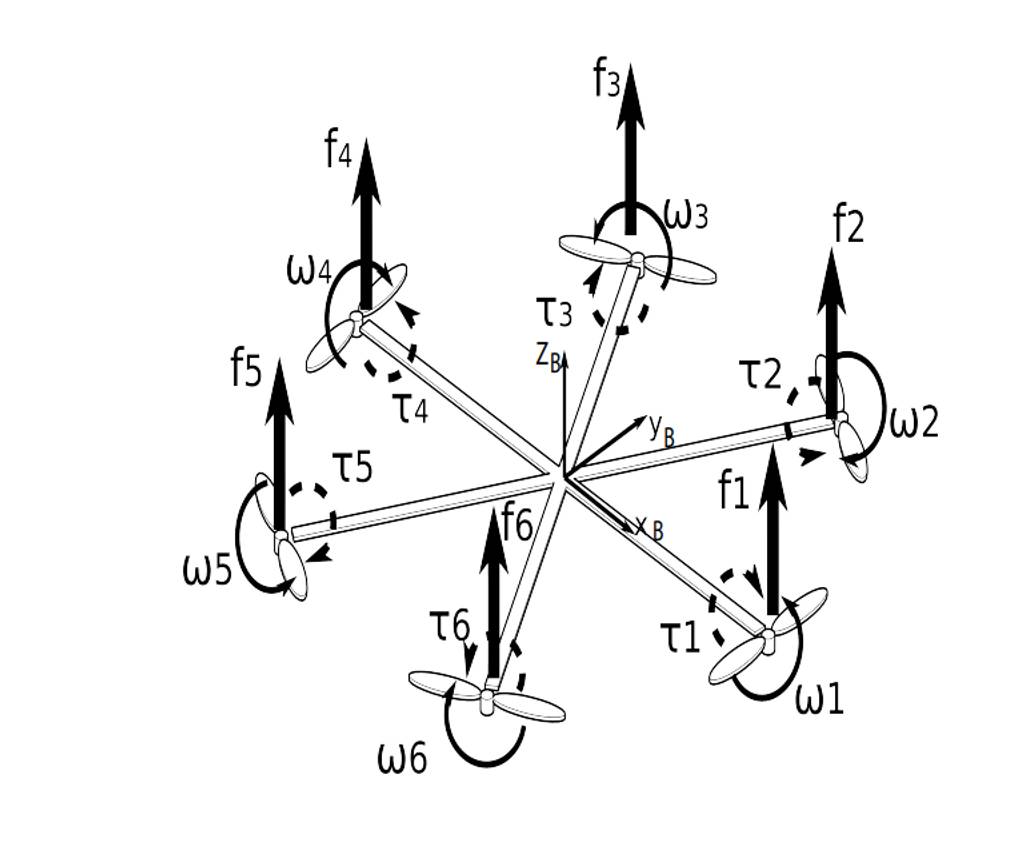
自然坐标系下,以无人机本身为参考系
b V ˙ C M ∣ i b { }^{b} \dot{\mathrm{V}}_{C M \mid i}^{b} bV˙CM∣ib
说明:
- 基础变量是线性加速度
- 左上:以体坐标系下的微分
- 右上:体坐标系下的加速度
- 下标:这个变量是质心相对于惯性系
- 这里使用+号坐标系法,x的正方向指向motor1
Mass Moment of Inertia Matrix 质量惯性矩阵
对应轴的转动惯量
J b = [ J x x 0 0 0 J y y 0 0 0 J z z ] J^{b}=\left[\begin{array}{ccc} J_{x x} & 0 & 0 \\ 0 & J_{y y} & 0 \\ 0 & 0 & J_{z z} \end{array}\right] Jb=
Jxx000Jyy000Jzz
推力系数Thrust Coefficient
T = C T ρ A r r 2 ϖ 2 T=C_{T} \rho A_{r} r^{2} \varpi^{2} T=CTρArr2ϖ2
其中:
ρ是空气密度
CT是特定一个旋翼的系数
Ar是螺旋桨旋转的扫掠面积
r是旋翼半径
ϖ \varpi ϖ
是旋翼角速度
Torque Coefficient 转矩系数
马达效应
A current-carrying wire or coil can exert a force on a permanent magnet. This is called the motor effect
同时考虑马达效应和推力,和旋翼的角速度成正比
将常量化为一个系数最后得到:
Q = c Q ϖ 2 T = c T ϖ 2 Q=c_{Q} \varpi^{2}\\ T=c_{T} \varpi^{2} Q=cQϖ2T=cTϖ2
初试矩阵的建设 initial matrix construction
通过输入测试得到的数据,我们提供了一个程序来方便计算这些系统系数,通过这些信息,我们能够建立一个Initial matrix,分别表示推力以及体坐标系下各轴转矩。
[ Σ T τ ϕ τ θ τ ψ ] = [ c T c T c T c T c T c T 0 3 2 d + c T 3 2 d + c T 0 − 3 2 d + c T − 3 2 d + c T − d + c T − 1 2 d + c T 1 2 d + c T d + c T 1 2 d + c T − 1 2 d + c T c Q − c Q c Q − c Q c Q − c Q ] [ ϖ 1 2 ϖ 2 2 ϖ 3 2 ϖ 4 2 ϖ 5 2 ϖ 6 2 ] \left[\begin{array}{l} \Sigma T \\ \tau_{\phi} \\ \tau_{\theta} \\ \tau_{\psi} \end{array}\right]=\left[\begin{array}{cccc} c_{T} & c_{T} & c_{T} & c_{T} & c_{T} & c_{T} \\ 0 & \frac{\sqrt{3}}{2}d_{+} c_{T} & \frac{\sqrt{3}}{2}d_{+}c_{T} & 0 &- \frac{\sqrt{3}}{2}d_{+} c_{T}&-\frac{\sqrt{3}}{2}d_{+} c_{T}\\ -d_{+} c_{T} & -\frac{1}{2}d_{+}c_{T}& \frac{1}{2}d_{+}c_{T} & d_{+}c_{T}&\frac{1}{2}d_{+}c_{T}&-\frac{1}{2}d_{+}c_{T}\\ c_{Q} & -c_{Q} & c_{Q} & -c_{Q}& c_{Q} & -c_{Q} \end{array}\right]\left[\begin{array}{l} \varpi_{1}^{2} \\ \varpi_{2}^{2} \\ \varpi_{3}^{2} \\ \varpi_{4}^{2} \\ \varpi_{5}^{2} \\ \varpi_{6}^{2} \end{array}\right] ΣTτϕτθτψ = cT0−d+cTcQcT23d+cT−21d+cT−cQcT23d+cT21d+cTcQcT0d+cT−cQcT−23d+cT21d+cTcQcT−23d+cT−21d+cT−cQ ϖ12ϖ22ϖ32ϖ42ϖ52ϖ62
百分比控制 Throttle Command Relation
调速命令
为了控制,由于系数是从推力转矩与rpm之间转换的,所以需要线性回归来将调速命令转换成为rpm
ϖ S S = ( Throttle % ) c R + b \varpi_{S S}=(\text { Throttle } \%) c_{R}+b ϖSS=( Throttle %)cR+b
解释:
ϖ 是期望稳定的转速。 \varpi 是期望稳定的转速。 ϖ是期望稳定的转速。
throttle是比例
Cr是rpm的转换系数,b是y的偏移
陀螺力Gyroscopic Forces
陀螺力是由每个马达的转动惯量,以及转速,还有角速度Roll and Pitch rate,反力的方向参考这篇文章,简单来说,反力的方向是:
τ = T = I ω 马达 × ω R 、 P 、 Q 的方向 \tau=T=I \omega_{马达}× \omega_{R、P、Q的方向} τ=T=Iω马达×ωR、P、Q的方向
τ ϕ gyro = J m Q ( π 30 ) ( ϖ 1 − ϖ 2 + ϖ 3 − ϖ 4 + ϖ 5 − ϖ 6 ) τ θ gyro = J m P ( π 30 ) ( − ϖ 1 + ϖ 2 − ϖ 3 + ϖ 4 − ϖ 5 + ϖ 6 ) \begin{gathered} \tau_{\phi_{\text {gyro }}}=J_{m} Q\left(\frac{\pi}{30}\right)\left(\varpi_{1}-\varpi_{2}+\varpi_{3}-\varpi_{4}+\varpi_{5}-\varpi_{6}\right) \\ \tau_{\theta_{\text {gyro }}}=J_{m} P\left(\frac{\pi}{30}\right)\left(-\varpi_{1}+\varpi_{2}-\varpi_{3}+\varpi_{4}-\varpi_{5}+\varpi_{6}\right) \end{gathered} τϕgyro =JmQ(30π)(ϖ1−ϖ2+ϖ3−ϖ4+ϖ5−ϖ6)τθgyro =JmP(30π)(−ϖ1+ϖ2−ϖ3+ϖ4−ϖ5+ϖ6)
pi/30代表从rpm转换到角度速度的转换
最后方程建设
将之前得到的转矩和陀螺力加起来
M A , T b = [ 3 2 d + c T ϖ 2 2 + 3 2 d + c T ϖ 3 2 − 3 2 d + c T ϖ 5 2 − 3 2 d + c T ϖ 6 2 + J m Q ( π 30 ) ( ϖ 1 − ϖ 2 + ϖ 3 − ϖ 4 + ϖ 5 − ϖ 6 ) − d + c T ϖ 1 2 + − 1 2 d + c T ϖ 2 2 + 1 2 d + c T ϖ 3 2 + d + c T ϖ 4 2 + 1 2 d + c T ϖ 5 2 − 1 2 d + c T ϖ 6 2 + J m P ( π 30 ) ( − ϖ 1 + ϖ 2 − ϖ 3 + ϖ 4 − ϖ 5 + ϖ 6 ) c Q ϖ 1 2 − c Q ϖ 2 2 + c Q ϖ 3 2 − c Q ϖ 4 2 + c Q ϖ 5 2 − c Q ϖ 6 2 ] M_{A, T}^{b}=\left[\begin{array}{c} \frac{\sqrt{3}}{2}d_{+} c_{T}\varpi_{2}^{2} + \frac{\sqrt{3}}{2}d_{+}c_{T}\varpi_{3}^{2} - \frac{\sqrt{3}}{2}d_{+} c_{T}\varpi_{5}^{2}-\frac{\sqrt{3}}{2}d_{+} c_{T}\varpi_{6}^{2}+J_{m} Q\left(\frac{\pi}{30}\right)\left(\varpi_{1}-\varpi_{2}+\varpi_{3}-\varpi_{4}+\varpi_{5}-\varpi_{6}\right) \\ -d_{+} c_{T}\varpi_{1}^{2} + -\frac{1}{2}d_{+}c_{T}\varpi_{2}^{2}+ \frac{1}{2}d_{+}c_{T}\varpi_{3}^{2} + d_{+}c_{T}\varpi_{4}^{2}+ \frac{1}{2}d_{+}c_{T}\varpi_{5}^{2} -\frac{1}{2}d_{+}c_{T}\varpi_{6}^{2} +J_{m} P\left(\frac{\pi}{30}\right)\left(-\varpi_{1}+\varpi_{2}-\varpi_{3}+\varpi_{4}-\varpi_{5}+\varpi_{6}\right) \\ c_{Q} \varpi_{1}^{2}-c_{Q} \varpi_{2}^{2}+c_{Q} \varpi_{3}^{2}-c_{Q} \varpi_{4}^{2}+c_{Q} \varpi_{5}^{2}-c_{Q} \varpi_{6}^{2} \end{array}\right] MA,Tb= 23d+cTϖ22+23d+cTϖ32−23d+cTϖ52−23d+cTϖ62+JmQ(30π)(ϖ1−ϖ2+ϖ3−ϖ4+ϖ5−ϖ6)−d+cTϖ12+−21d+cTϖ22+21d+cTϖ32+d+cTϖ42+21d+cTϖ52−21d+cTϖ62+JmP(30π)(−ϖ1+ϖ2−ϖ3+ϖ4−ϖ5+ϖ6)cQϖ12−cQϖ22+cQϖ32−cQϖ42+cQϖ52−cQϖ62
这里
M A , T b M_{A, T}^{b} MA,Tb
代表由推力空气动力学推力和扭矩生成的力矩,主体部分收到的推力可以由以下表达。
F A , T b = [ 0 0 c T ( ϖ 1 2 + ϖ 2 2 + ϖ 3 2 + ϖ 4 2 + ϖ 5 2 + ϖ 6 2 ) ] \mathrm{F}_{A, T}^{b}=\left[\begin{array}{c} 0 \\ 0 \\ c_{T}\left(\varpi_{1}^{2}+\varpi_{2}^{2}+\varpi_{3}^{2}+\varpi_{4}^{2}+\varpi_{5}^{2}+\varpi_{6}^{2}\right) \end{array}\right] FA,Tb=
00cT(ϖ12+ϖ22+ϖ32+ϖ42+ϖ52+ϖ62)
其中f代表在基坐标系下,由空气阻力和推力同时作用下的力。
状态方程
角速度状态方程,其中包含每个角度的状态方程:
b ω ˙ b ∣ i b = ( J b ) − 1 [ M A , T b − Ω b ∣ i b J b ω b ∣ i b ] = [ P ˙ Q ˙ R ˙ ] { }^{b} \dot{\omega}_{b \mid i}^{b}=\left(J^{b}\right)^{-1}\left[M_{A, T}^{b}-\Omega_{b \mid i}^{b} J^{b} \omega_{b \mid i}^{b}\right]=\left[\begin{array}{c} \dot{P} \\ \dot{Q} \\ \dot{R} \end{array}\right] bω˙b∣ib=(Jb)−1[MA,Tb−Ωb∣ibJbωb∣ib]=
P˙Q˙R˙
其中:后面一项可以理解为刚体的科氏加速度,推导借鉴这里以下是借鉴推导部分,Ω矩阵将wb叉乘转化为点乘
Ω b ∣ i b = [ 0 − R Q R 0 − P − Q P 0 ] \Omega_{b \mid i}^{b}=\left[\begin{array}{ccc} 0 & -\mathrm{R} & \mathrm{Q} \\ \mathrm{R} & 0 & -\mathrm{P} \\ -\mathrm{Q} & \mathrm{P} & 0 \end{array}\right] Ωb∣ib=
0R−Q−R0PQ−P0
这个部分是角速度
ω b ∣ i b = [ P Q R ] \omega_{b \mid i}^{b}=\left[\begin{array}{l} P \\ Q \\ R \end{array}\right] \\ ωb∣ib= PQR
下一个状态方程是欧拉运动方程,描述了欧拉角在惯性系下的运动速率
Φ ˙ = H ( Φ ) ω b ∣ i b = [ ϕ ˙ θ ˙ ψ ˙ ] \dot{\Phi}=H(\Phi) \omega_{b \mid i}^{b}=\left[\begin{array}{c} \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \end{array}\right]\\ Φ˙=H(Φ)ωb∣ib= ϕ˙θ˙ψ˙
笛卡尔坐标系下,使用旋转矩阵转换描述机体坐标系表达的一切向量。
利用欧拉角组成旋转矩阵
u b = [ 1 0 0 0 c ( ϕ ) s ( ϕ ) 0 − s ( ϕ ) c ( ϕ ) ] [ c ( θ ) 0 − s ( θ ) 0 1 0 s ( θ ) 0 c ( θ ) ] [ c ( ψ ) s ( ψ ) 0 − s ( ψ ) c ( ψ ) 0 0 0 1 ] u i \mathrm{u}^{b}=\left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \mathrm{c}(\phi) & \mathrm{s}(\phi) \\ 0 & -\mathrm{s}(\phi) & \mathrm{c}(\phi) \end{array}\right]\left[\begin{array}{ccc} \mathrm{c}(\theta) & 0 & -\mathrm{s}(\theta) \\ 0 & 1 & 0 \\ \mathrm{~s}(\theta) & 0 & \mathrm{c}(\theta) \end{array}\right]\left[\begin{array}{ccc} \mathrm{c}(\psi) & \mathrm{s}(\psi) & 0 \\ -\mathrm{s}(\psi) & \mathrm{c}(\psi) & 0 \\ 0 & 0 & 1 \end{array}\right] \mathrm{u}^{i}\\ ub=
1000c(ϕ)−s(ϕ)0s(ϕ)c(ϕ)
c(θ)0 s(θ)010−s(θ)0c(θ)
c(ψ)−s(ψ)0s(ψ)c(ψ)0001
ui
cb是旋转方程相乘得到
C b ∣ i = [ c ( θ ) c ( ψ ) c ( θ ) s ( ψ ) − s ( θ ) ( − c ( ϕ ) s ( ψ ) + s ( ϕ ) s ( θ ) c ( ψ ) ) ( c ( ϕ ) c ( ψ ) + s ( ϕ ) s ( θ ) s ( ψ ) ) s ( ϕ ) c ( θ ) ( s ( ϕ ) s ( ψ ) + c ( ϕ ) s ( θ ) c ( ψ ) ) ( − s ( ϕ ) c ( ψ ) + c ( ϕ ) s ( θ ) s ( ψ ) ) c ( ϕ ) c ( θ ) ] C_{b \mid i}=\left[\begin{array}{ccc} \mathrm{c}(\theta) \mathrm{c}(\psi) & \mathrm{c}(\theta) \mathrm{s}(\psi) & -\mathrm{s}(\theta) \\ (-\mathrm{c}(\phi) \mathrm{s}(\psi)+\mathrm{s}(\phi) \mathrm{s}(\theta) c(\psi)) & (c(\phi) c(\psi)+s(\phi) s(\theta) s(\psi)) & \mathrm{s}(\phi) \mathrm{c}(\theta) \\ (s(\phi) s(\psi)+c(\phi) s(\theta) c(\psi)) & (-s(\phi) c(\psi)+c(\phi) s(\theta) s(\psi)) & \mathrm{c}(\phi) \mathrm{c}(\theta) \end{array}\right] \\ Cb∣i=
c(θ)c(ψ)(−c(ϕ)s(ψ)+s(ϕ)s(θ)c(ψ))(s(ϕ)s(ψ)+c(ϕ)s(θ)c(ψ))c(θ)s(ψ)(c(ϕ)c(ψ)+s(ϕ)s(θ)s(ψ))(−s(ϕ)c(ψ)+c(ϕ)s(θ)s(ψ))−s(θ)s(ϕ)c(θ)c(ϕ)c(θ)
这可以用来解决速度和位置方程
通过引入这个旋转矩阵
角速度可以表达为:
ω b ∣ i b = [ ϕ ˙ 0 0 ] + C ϕ ( [ 0 θ ˙ 0 ] + C θ [ 0 0 ψ ˙ ] ) \omega_{b \mid i}^{b}=\left[\begin{array}{c} \dot{\phi} \\ 0 \\ 0 \end{array}\right]+C_{\phi}\left(\left[\begin{array}{l} 0 \\ \dot{\theta} \\ 0 \end{array}\right]+C_{\theta}\left[\begin{array}{l} 0 \\ 0 \\ \dot{\psi} \end{array}\right]\right) ωb∣ib= ϕ˙00 +Cϕ 0θ˙0 +Cθ 00ψ˙
最后欧拉运动学方程能用如下的的运动学方程来表示
Φ ˙ = [ ϕ ˙ θ ˙ ψ ˙ ] = [ 1 t ( θ ) s ( ϕ ) t ( θ ) c ( ϕ ) 0 c ( ϕ ) − s ( ϕ ) 0 s ( ϕ ) / c ( θ ) c ( ϕ ) / c ( θ ) ] [ P Q R ] = H ( Φ ) ω b ∣ i b \dot{\Phi}=\left[\begin{array}{c} \dot{\phi} \\ \dot{\theta} \\ \dot{\psi} \end{array}\right]=\left[\begin{array}{ccc} 1 & t(\theta) s(\phi) & t(\theta) c(\phi) \\ 0 & c(\phi) & -s(\phi) \\ 0 & s(\phi) / c(\theta) & c(\phi) / c(\theta) \end{array}\right]\left[\begin{array}{l} P \\ Q \\ R \end{array}\right]=H(\Phi) \omega_{b \mid i}^{b} Φ˙=
ϕ˙θ˙ψ˙
=
100t(θ)s(ϕ)c(ϕ)s(ϕ)/c(θ)t(θ)c(ϕ)−s(ϕ)c(ϕ)/c(θ)
PQR
=H(Φ)ωb∣ib
虽然这种方法很有效,但是有一个缺陷,当θ等于正负90度时,有奇异点出现,这样当飞行器的的pitch角度达到正负90时候,精确性就要打折了,
但是对于保守的设计来说够了。
解决方法:
使用四元数来模拟就可以解决
下一个是速度状态方程
b V ˙ C M ∣ i b = ( 1 m ) F A , T b + g b − Ω b ∣ i b ω C M ∣ i b = [ U ˙ V ˙ W ˙ ] { }^{b} \dot{\mathrm{V}}_{C M \mid i}^{b}=\left(\frac{1}{m}\right) \mathrm{F}_{A, T}^{b}+g^{b}-\Omega_{b \mid i}^{b} \omega_{C M \mid i}^{b}=\left[\begin{array}{c} \dot{U} \\ \dot{V} \\ \dot{W} \end{array}\right] bV˙CM∣ib=(m1)FA,Tb+gb−Ωb∣ibωCM∣ib=
U˙V˙W˙
考虑施加在主体质心的加速度和力
这里开头是线性加速度实在对应惯性系下的线性加速度,变量m是总质量,gb是转换以后的重力加速度,使用这个可以计算出xyz方向的加速度
最后一个状态方程是位置状态方程,描述了无人机质心的线性速度
i P ˙ C M ∣ i i = C i ∣ b V C M ∣ i b = [ X ˙ Y ˙ Z ˙ ] i \dot{\mathrm{P}}_{C M \mid i}^{i}=C_{i \mid b} \mathrm{~V}_{C M \mid i}^{b}=\left[\begin{array}{c} \dot{X} \\ \dot{Y} \\ \dot{Z} \end{array}\right] iP˙CM∣ii=Ci∣b VCM∣ib=
X˙Y˙Z˙
这里v代表无人机的速度由c来转化以后的速度,让我们得到无人机的速度。
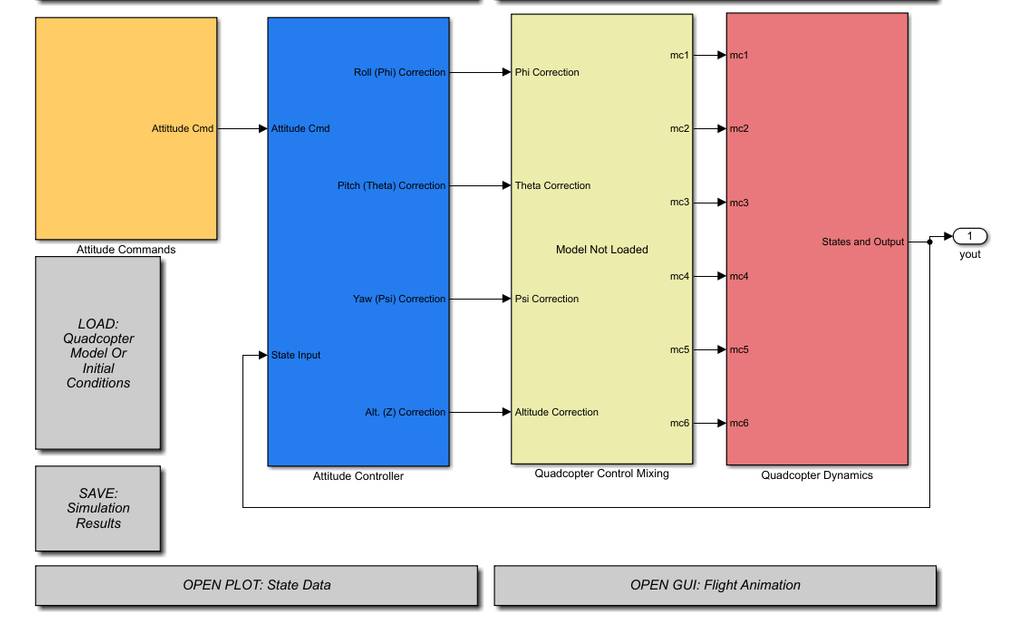
工程体现
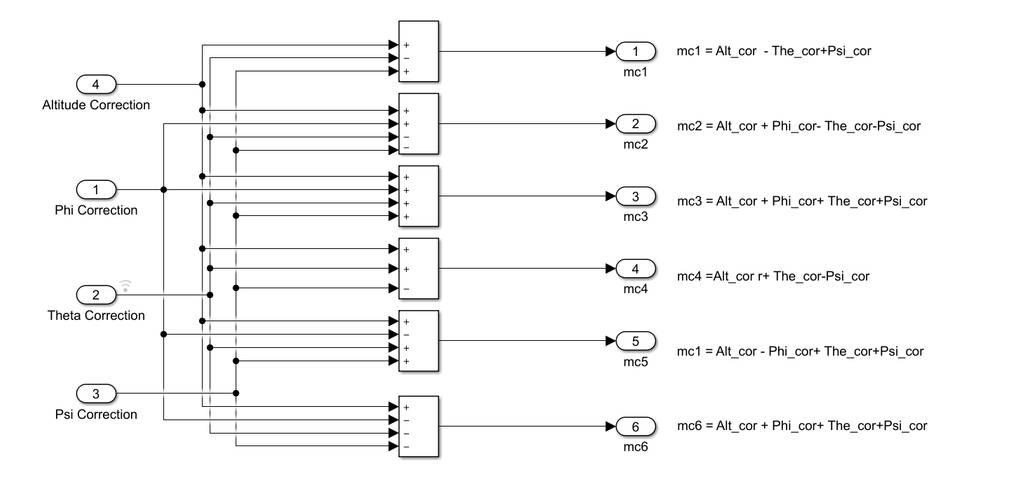
在工程中我们需要修改电机的数量,初试条件的举矩阵等,本着不多事的原则,我只修改了电机数量,内外反馈没有进行改动。
这是修改内容
整体改了六个旋翼,改了控制器和输入输出状态,反馈回路没有修改。
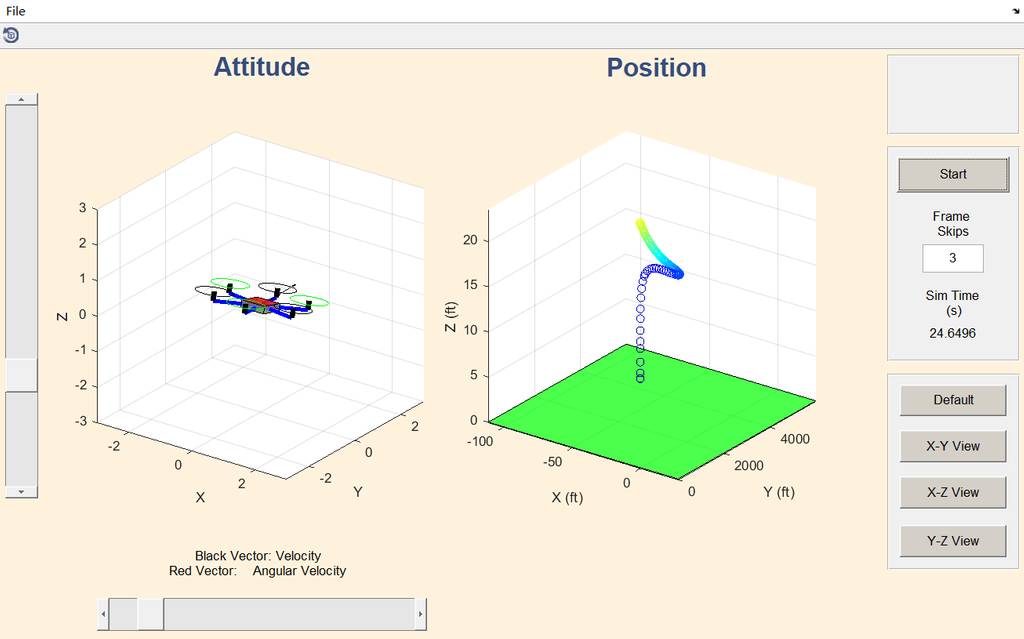
经过测试,整体上还是比较稳定的:
可视化界面,这里修改了模型。
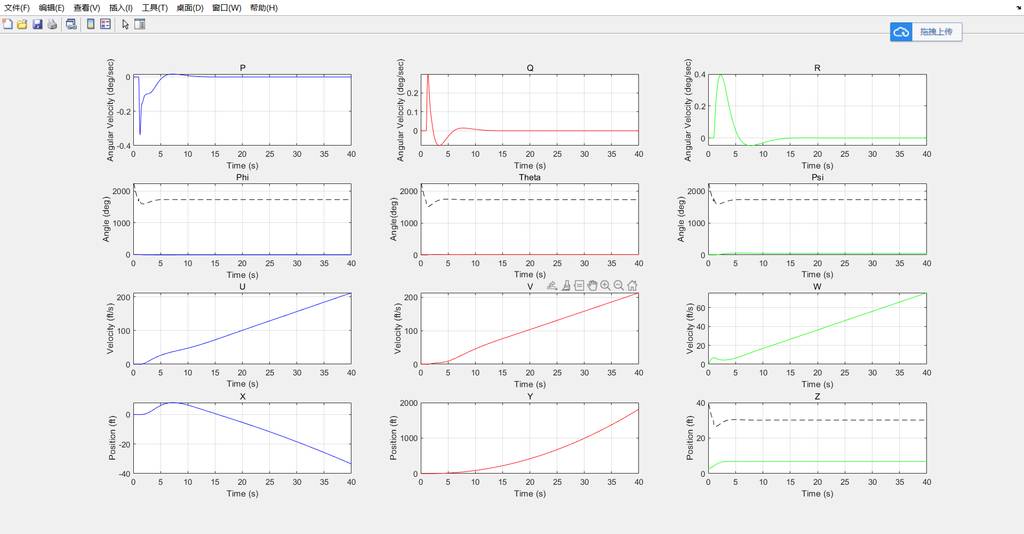
状态指标:
文件链接:私聊联系我,不要直接拍。
【闲鱼】https://m.tb.cn/h.Utxt7WY?tk=8mCvdOGY6Ck CZ0001 「我在闲鱼发布了【六旋翼SIMULINK仿真模型PID】」
点击链接直接打开
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/122608.html