
1. 单摆模型
为使得单摆在  处保持平衡,力矩必须有一个稳态分量满足
处保持平衡,力矩必须有一个稳态分量满足
选择状态变量为, 控制变量为,则状态方程变为
2. 线性化控制
将系统在原点线性化得:
取,容易验证当
时,A-BK是赫尔维茨矩阵,力矩为
3. matlab仿真代码
%=========== 单摆控制-状态反馈 ===========% clear all;clc;close all; %% 参数设置 g = 9.8; % 重力加速度 l = 1; % 摆长 k = 0.5; % 摩擦系数 m = 1; % 摆球质量 a = g/l; b = k/m; c = 1/(m*l^2); theta(1) = 0; delta = -pi/5; dtheta(1) = 0.2; interval = 0.05; t = 0:interval:40; k1 = -a*cos(delta)+5; k2 = -b/c + 5; A = [0 1; -a*cos(delta) -b]; B = [0;c]; K = [k1 k2]; eig(A - B*K) %% 状态变化 for i = 2:1:length(t) T = a*sin(delta)/c - k1*(theta(i-1)-delta) - k2*dtheta(i-1); % T = 0; ddtheta = -a*sin(theta(i-1)) - b*dtheta(i-1) +c*T; dtheta(i) = dtheta(i-1) + ddtheta*interval; theta(i) = theta(i-1) + dtheta(i)*interval; end figure plot(t,theta,'r') figure %绘制横梁 colordef black plot([-0.2;0.2],[0;0],'-y','LineWidth',20); x0=l*sin(theta(1));% 初始 x 坐标 y0=-l*cos(theta(1));% 初始 y 坐标 axis([-0.75,0.75,-1.25,1.25]); axis off %创建摆锤 %擦除模式为 xor % head=line(x0,y0,'color','r','linestyle','.',... % 'erasemode','xor','markersize',40); hold on %创建摆杆 body=line([0;x0],[-0.05;y0],'color','g','linestyle','-','erasemode','xor','LineWidth',2); head = []; for i = 2:1:length(t) x=l*sin(theta(i)); y=-l*cos(theta(i)); % set(head,'xdata',x,'ydata',y);% 改变擦除对象的坐标数据 set(body,'xdata',[0;x],'ydata',[-0.05;y]); delete(head); head = plot(x,y,'m.','MarkerSize',40); drawnow;% 刷新屏幕 pause(0.1) F = getframe(gcf); I = frame2im(F); [I,map] = rgb2ind(I,256); if (i == 2) imwrite(I,map,'single.gif','gif','Loopcount',inf,'Delaytime',0.2); else imwrite(I,map,'single.gif','gif','WriteMode','append','DelayTime',0.2); end end讯享网
4. 控制效果


5. 积分控制
积分控制中,不用寻找计算为保持平衡位置所需要的稳态力矩。此时的反馈控制率为:
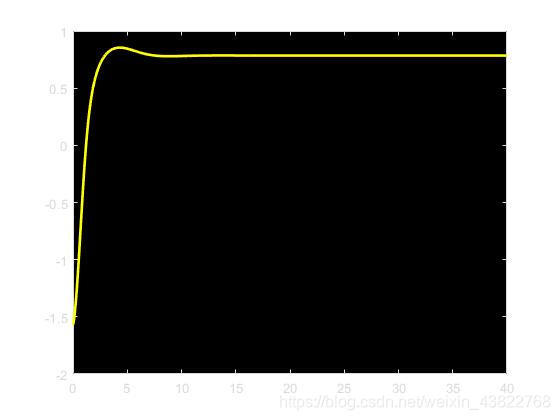
加入积分控制后,即不需要再寻找平衡力矩就可以实现稳态控制
6. 仿真结果
讯享网%=========== 单摆控制-线性化状态反馈 ===========% clear all;clc;close all; %% 参数设置 g = 9.8; % 重力加速度 l = 1; % 摆长 k = 0.5; % 摩擦系数 m = 1; % 摆球质量 a = g/l; b = k/m; c = 1/(m*l^2); theta(1) = -pi/2; delta = pi/4; dtheta(1) = 0.2; interval = 0.05; t = 0:interval:40; k1 = -a*cos(delta)+5; k2 = -b/c + 5; A = [0 1; -a*cos(delta) -b]; B = [0;c]; K = [k1 k2]; k3 = 3; eig(A - B*K) alpha(1) = 0; %% 状态变化 for i = 2:1:length(t) % T = a*sin(delta)/c - k1*(theta(i-1)-delta) - k2*dtheta(i-1); % T = 0; dalpha = theta(i-1) - delta; alpha(i) = alpha(i-1) + dalpha*interval; T = - k1*(theta(i-1)-delta) - k2*dtheta(i-1) -k3*alpha(i); ddtheta = -a*sin(theta(i-1)) - b*dtheta(i-1) +c*T; dtheta(i) = dtheta(i-1) + ddtheta*interval; theta(i) = theta(i-1) + dtheta(i)*interval; end figure plot(t,theta,'y','LineWidth',2) figure %绘制横梁 colordef black plot([-0.2;0.2],[0;0],'-y','LineWidth',20); x0=l*sin(theta(1));% 初始 x 坐标 y0=-l*cos(theta(1));% 初始 y 坐标 axis([-1,1,-1.25,1.25]); axis off %创建摆锤 %擦除模式为 xor % head=line(x0,y0,'color','r','linestyle','.',... % 'erasemode','xor','markersize',40); hold on %创建摆杆 body=line([0;x0],[-0.05;y0],'color','g','linestyle','-','erasemode','xor','LineWidth',2); head = []; for i = 2:1:length(t) x=l*sin(theta(i)); y=-l*cos(theta(i)); % set(head,'xdata',x,'ydata',y);% 改变擦除对象的坐标数据 set(body,'xdata',[0;x],'ydata',[-0.05;y]); delete(head); head = plot(x,y,'m.','MarkerSize',40); drawnow;% 刷新屏幕 pause(0.1) % F = getframe(gcf); % I = frame2im(F); % [I,map] = rgb2ind(I,256); % if (i == 2) % imwrite(I,map,'single.gif','gif','Loopcount',inf,'Delaytime',0.2); % else % imwrite(I,map,'single.gif','gif','WriteMode','append','DelayTime',0.2); % end end
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/11257.html