
1.机器人工具坐标Tool
在一个三维空间里为了描述一个刚体在空间的位姿,需在物体上固连一个坐标系,然后确定该坐标系位姿(原点位置和三个坐标轴姿态),即需要6个DOF数据来完整描述该刚体的位姿。对于工业机器人来讲,在使用时需要在末端法兰盘安装工具(Tool)来进行作业。
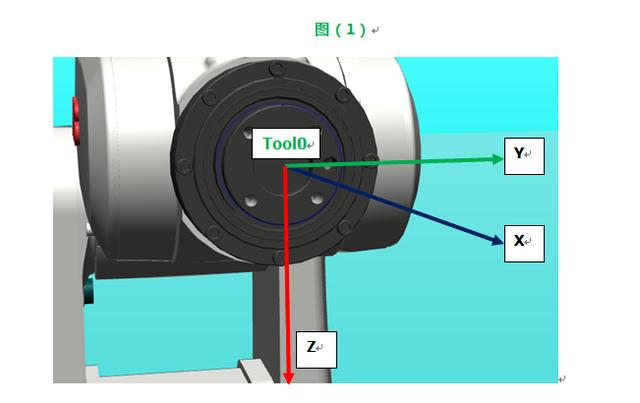
为了确定该工具(Tool)的位姿,在Tool上绑定一个工具坐标系TCS (Tool Coordinate System),TCS的原点就是TCP(Tool Center Point,工具中心点Tool0)。如下图(1)在机器人走运动轨迹编程时,需要将TCS在其他坐标系(工件坐标)的位姿记录到程序中执行。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/65047.html