
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达讯享网
一:局部特征描述子介绍
2014年VGG发表了一篇基于凸优化的局部特征描述子学习(DLCO)的论文,OpenCV3.2以后在扩展模块中对该论文的完成了代码实现并发布了API支持,提供了基于DLCO的描述子生成支持、基于生成的描述子,可以实现图像特征匹配的对象识别。关于特征描述子学习相关的细节可以看这里:
http://www.robots.ox.ac.uk/~vgg/software/learn_desc/
提供了描述子模型,学习数据,C++版本实现的源代码下载
二:OpenCV程序演示
OpenCV中VGG的DLCO描述子生成支持下面几种
- VGG_120 = 100,
- VGG_80 = 101,
- VGG_64 = 102,
- VGG_48 = 103
默认支持输出描述子是120个向量即VGG_120。基于DLCO在OpenCV中代码实现对象检测与匹配大致分为如下几步:
1.加载图像
讯享网Mat box = imread("D:/vcprojects/images/box.png"); Mat scene = imread("D:/vcprojects/images/box_in_scene.png"); imshow("box image", box); imshow("scene image", scene);
2.关键点检测(SURF)
Ptr<SURF> detector = SURF::create(); int minHessian = 400; vector<KeyPoint> keypoints_1, keypoints_2; detector->setHessianThreshold(minHessian); detector->detect(box, keypoints_1); detector->detect(box_scene, keypoints_2);3.描述子生成(DLCO)
讯享网Ptr<VGG> vgg_descriptor = VGG::create(); Mat descriptors_1, descriptors_2; vgg_descriptor->compute(box, keypoints_1, descriptors_1); vgg_descriptor->compute(box_scene, keypoints_2, descriptors_2);
4.特征匹配实现对象识别
// 计算匹配点 FlannBasedMatcher matcher; std::vector< DMatch > matches; matcher.match(descriptors_1, descriptors_2, matches); double max_dist = 0; double min_dist = 100; // 计算最大与最小距离 for (int i = 0; i < descriptors_1.rows; i++) { double dist = matches[i].distance; if (dist < min_dist) min_dist = dist; if (dist > max_dist) max_dist = dist; } printf("-- Max dist : %f \n", max_dist); printf("-- Min dist : %f \n", min_dist); // 寻找**匹配,距离越小越好 std::vector< DMatch > good_matches; for (int i = 0; i < descriptors_1.rows; i++) { if (matches[i].distance <= min(2 * min_dist, 1.5)) { good_matches.push_back(matches[i]); } } // 绘制最终匹配点 Mat img_matches; drawMatches(box, keypoints_1, box_scene, keypoints_2, good_matches, img_matches, Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS); //-- Localize the object std::vector<Point2f> obj; std::vector<Point2f> scene; for (size_t i = 0; i < good_matches.size(); i++) { //-- Get the keypoints from the good matches obj.push_back(keypoints_1[good_matches[i].queryIdx].pt); scene.push_back(keypoints_2[good_matches[i].trainIdx].pt); } Mat H = findHomography(obj, scene, RANSAC); //-- Get the corners from the image_1 ( the object to be "detected" ) std::vector<Point2f> obj_corners(4); obj_corners[0] = cvPoint(0, 0); obj_corners[1] = cvPoint(box.cols, 0); obj_corners[2] = cvPoint(box.cols, box.rows); obj_corners[3] = cvPoint(0, box.rows); std::vector<Point2f> scene_corners(4); perspectiveTransform(obj_corners, scene_corners, H); //-- Draw lines between the corners (the mapped object in the scene - image_2 ) line(img_matches, scene_corners[0] + Point2f(box.cols, 0), scene_corners[1] + Point2f(box.cols, 0), Scalar(0, 255, 0), 4); line(img_matches, scene_corners[1] + Point2f(box.cols, 0), scene_corners[2] + Point2f(box.cols, 0), Scalar(0, 255, 0), 4); line(img_matches, scene_corners[2] + Point2f(box.cols, 0), scene_corners[3] + Point2f(box.cols, 0), Scalar(0, 255, 0), 4); line(img_matches, scene_corners[3] + Point2f(box.cols, 0), scene_corners[0] + Point2f(box.cols, 0), Scalar(0, 255, 0), 4); //-- Show detected matches imshow("Good Matches & Object detection", img_matches);原图:
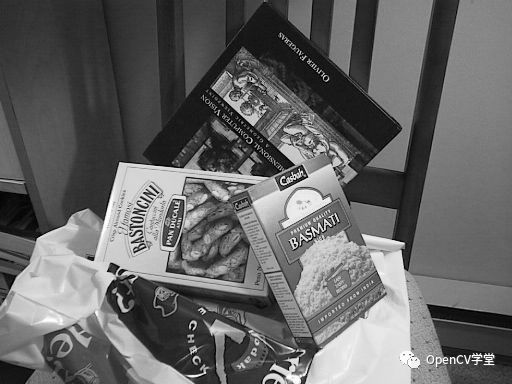

特征匹配结果

讯享网
好消息!
小白学视觉知识星球
开始面向外开放啦👇👇👇

讯享网下载1:OpenCV-Contrib扩展模块中文版教程 在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。 下载2:Python视觉实战项目52讲 在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。 下载3:OpenCV实战项目20讲 在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。 交流群 欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/60970.html