
工程建立步骤:
- 建立一个文件夹,文件夹的名称就是任务名称,如XX
- 将test1-gpio文件夹中的内容全部拷贝到XX
- 通过uVision(或直接点击XX文件夹下的*.uvprojx)打开工程
- 打开工程文件夹下的main.c文件
- 修改main函数,其余不动
main函数结构
int main(){ Device_Init(); //不要动 //添加你的其他初始化代码 while(1){//工作循环 //添加需要一直需要做的工作代码,如显示等 } return 1; }可以看出来,主函数的结构和一般嵌入式系统的主函数一样,首先是初始化工作,这里只不过添加了一个Device_Init()函数,一般该函数我们不需要修改,在该函数之后我们要添加一下我们具体工作的初始化工作代码;随后是一个死循环,其中主要放置周期性的、有规范性的或查询等工作,一般我们将显示部分放置其中。另外程序结构还有一部分就是中断,我们所有的模板已经将中断服务功能抽出来放到了ISR.C中了,我们可以在此修改。我们也可以不要模板,直接从main函数的第一行写,这也是可以的。
讯享网void Device_Init() { SetPll();//设置PLL的,不要动 //IRQ_Disable(); GPIO_Init();//可能有得较多,具体内容根据需要到该函数中设定 //IRQ_Init(); //SetSysTick(); //PWM_Init(); //ADC_Init(); //OPA0_Init(); //OPA2_Init(); //CMP0_Init(); //Uart0_Init();//初始化串口的,数据格式、波特率到此设定 //IRQ_Enable();//使能中断的,具体使能哪些中断,可以到该函数中设定 }
Device_Init()一般我们要按需选择,注释掉不需要的。从代码中也可以看出主要涉及的是关于片上设备的选择问题。我们按需修改,并在其下添加片外设备的初始化代码。
查看函数的定义:
以查看Device_Init为例,选中函数名Device_Init,右击,出现浮动窗,如下图,选中Go to Defiition of ‘Device_Init’,系统自动跳转到Device_Init

常用的位操作技巧
//有用的技巧 //将某个变量(或寄存器)PA的i,j位置1: PA |= ((1<<i)|(1<<j)); //将某个变量(或寄存器)PA的i,j位置0: PA &= ~((1<<i)|(1<<j));C语言操作外设:
对目前大部分的MCU来说,操作外设就是对特定的寄存器进行读写操作。一般外设的寄存器被映射到系统存储器空间,它们可以通过指针进行访问。使用微控制器供应商提供的设备驱动,可以简化开发任务,并且增强软件在不同平台之间的可移植性。如果需要直接访问外设寄存器,可以使用以下方法:
1
LK32T102的管脚
LK32T102内部设备功能较多,而管脚较少,所以基本上每一个管脚都是多功能的,基本上可以分为两大类:数字端口和模拟端口两大类,如下图所示:
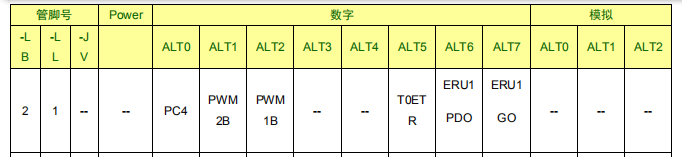
此信息可以从编程信息手册中查出。
因为管脚功能较多,则一定有用于管脚功能选择的寄存器,这个基本对应着CFGx寄存器,每一个端口涉及32个配置寄存器CFGx(x=0~31),对应32个管脚,但是实际只用到16个。
GPIO口操作
有3个端口,分别为PA,PB,PC,每个端口可以有32条口线,但是实际PA,PB可能只用到16个,PC更少。
2个管脚值寄存器(1个管脚值寄存器PIN(只读)和管脚输出寄存器OUT(读写)),1个管脚输出使能OUTEN,1个管脚置位OUTSET,1个管脚清零OUTCLR
操作的方法有两种:
讯享网PA->OUTEN=0x000000FF;
上述代码中PA表示端口PA,OUTEN表示寄存器OUTEN,其他类似
2)借助已定义的宏------>有关定义在GPIO.H
如实现上述代码的同样功能:
PA_OUT_ENABLE(0); PA_OUT_ENABLE(1); .... PA_OUT_ENABLE(8);具体可以查阅GPIO.H,有非常详细的解释。建议直接操作寄存器。
这两个头文件已经包含在模板中了,一般不需要我们过多的设置。
深入系统初始化
在我们的工程模板中,main函数调用了Device_Init();Device_Init()又调用了很多基本设备的初始化工作:
void Device_Init() { SetPll(); //IRQ_Disable(); GPIO_Init(); IRQ_Init(); //SetSysTick(); //PWM_Init(); //ADC_Init(); //OPA0_Init(); //OPA2_Init(); //CMP0_Init(); Uart0_Init();// //IRQ_Enable();// }上述的意义很明确,一般不需要修改;其中的GPIO_Init()就是关于GPIO的初始化的,我们可以进行基本的初始化工作:
void GPIO_Init() { // GPIO_AF_SEL(DIGITAL,PA,8,2); // PWM1A // GPIO_AF_SEL(DIGITAL,PA,9,2); // PWM2B // GPIO_AF_SEL(DIGITAL,PA,10,2); // PWM2A // GPIO_AF_SEL(DIGITAL,PB,13,2); // PWM0B // GPIO_AF_SEL(DIGITAL,PB,14,2); // PWM0A // GPIO_AF_SEL(DIGITAL,PB,15,2); // PWM1B // // GPIO_AF_SEL(DIGITAL,PA,11,7); // TIM_CH1 // GPIO_AF_SEL(DIGITAL,PA,12,7); // TIM_CH1N // GPIO_AF_SEL(DIGITAL,PB,12,4); // TIM_BKIN // // GPIO_AF_SEL(DIGITAL,PB,2,5); // PB2 // // GPIO_AF_SEL(ANALOGY,PB,11,0); // ADCB6 // GPIO_AF_SEL(ANALOGY,PC,13,0); // ADCB7 // // GPIO_AF_SEL(ANALOGY,PA,0,0); // OPA0P // // GPIO_AF_SEL(ANALOGY,PB,0,0); // OPA2P // // GPIO_AF_SEL(DIGITAL,PB,8,5); // TIM_CH2 // GPIO_AF_SEL(DIGITAL,PB,9,5); // TIM_CH2N // GPIO_AF_SEL(DIGITAL,PC,0,1); // TIM_CH3 // GPIO_AF_SEL(DIGITAL,PB,1,6); // TIM_CH3N // // GPIO_AF_SEL(DIGITAL,PC,6,3); // PC6 // GPIO_AF_SEL(DIGITAL,PA,15,3); // PA15 GPIO_AF_SEL(DIGITAL, PA, 2, 1); // PA2 GPIO_AF_SEL(DIGITAL, PA, 3, 1); // PA3 //PB0 - PB7 -> LED1 - LED8 GPIO_AF_SEL(DIGITAL, PB, 0, 0); // LED1 - D9 GPIO_AF_SEL(DIGITAL, PB, 1, 0); // LED2 - D10 GPIO_AF_SEL(DIGITAL, PB, 2, 0); // LED3 - D11 GPIO_AF_SEL(DIGITAL, PB, 3, 0); // LED4 - D12 GPIO_AF_SEL(DIGITAL, PB, 4, 0); // LED5 - D13 GPIO_AF_SEL(DIGITAL, PB, 5, 0); // LED6 - D14 GPIO_AF_SEL(DIGITAL, PB, 6, 0); // LED7 - D15 GPIO_AF_SEL(DIGITAL, PB, 7, 0); // LED8 - D16 //PB8 - PB15 -> GPIO_AF_SEL(DIGITAL, PB, 8, 0); // R1 GPIO_AF_SEL(DIGITAL, PB, 9, 0); // R2 GPIO_AF_SEL(DIGITAL, PB, 10, 0); // R3 GPIO_AF_SEL(DIGITAL, PB, 11, 0); // R4 GPIO_AF_SEL(DIGITAL, PB, 12, 0); // C1 GPIO_AF_SEL(DIGITAL, PB, 13, 0); // C2 GPIO_AF_SEL(DIGITAL, PB, 14, 0); // C3 GPIO_AF_SEL(DIGITAL, PB, 15, 0); // C4 // PA0 -> SB1 PA1 -> SB2 PA10 -> SB3 PA11 -> SB4 GPIO_AF_SEL(DIGITAL, PA, 0, 0); // GPIO_AF_SEL(DIGITAL, PA, 1, 0); // GPIO_AF_SEL(DIGITAL, PA, 10, 0); // GPIO_AF_SEL(DIGITAL, PA, 11, 0); // // GPIO_PUPD_SEL(PUPD_NULL, PA, 0 ); GPIO_PUPD_SEL(PUPD_NULL, PA, 1 ); GPIO_PUPD_SEL(PUPD_NULL, PA, 10 ); GPIO_PUPD_SEL(PUPD_NULL, PA, 11 ); // GPIO_PUPD_SEL(PUPD_NULL, PB, 8 ); GPIO_PUPD_SEL(PUPD_NULL, PB, 9 ); GPIO_PUPD_SEL(PUPD_NULL, PB, 10 ); GPIO_PUPD_SEL(PUPD_NULL, PB, 11 ); // GPIO_AF_SEL(DIGITAL, PA, 12, 0); // //PWM //GPIO_AF_SEL(DIGITAL, PA, 7, 3);// T0CH2 PA_OUT_ENABLE(7); // GPIO_AF_SEL(DIGITAL, PB, 14, 0); GPIO_PUPD_SEL(PUPD_NULL, PB, 14); // GPIO_AF_SEL(DIGITAL, PA, 6, 3);// T0CH1 GPIO_PUPD_SEL(PUPD_NULL, PA, 6); }这两处可能是我们会用掉的,在这里我们只需要选择相应的功能即可。
/* 上述代码中的的函数GPIO_AF_SEL(uint8_t AD,PA_Type* GPIOx,uint8_t gpiopin,uint8_t fun_num)表示GPIO管脚功能选择. AD 第一个参数代表处理数字量还是模拟量,DIGITAL ANALOGY GPIOx 第二个参数代表端口,PA PB PC gpiopin 第三个参数代表管脚,0~31 fun_num 第4个参数代表功能,0~7 管脚及功能要查编程手册P20 */除非有配置管脚新功能,我们不要动Device_Init()和GPIO_Init(),有关的配置直接在main.c的main函数中配置。
//
很遗憾,有很多的东西我没有办法一一给大家回复,所以我建立了一个群,供大家一起交流!

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/56779.html