
惯性导航—常用坐标系
捷联惯导系统的导航解算中,常用到四个坐标系,接下来介绍四个坐标系定义及其表示符号。
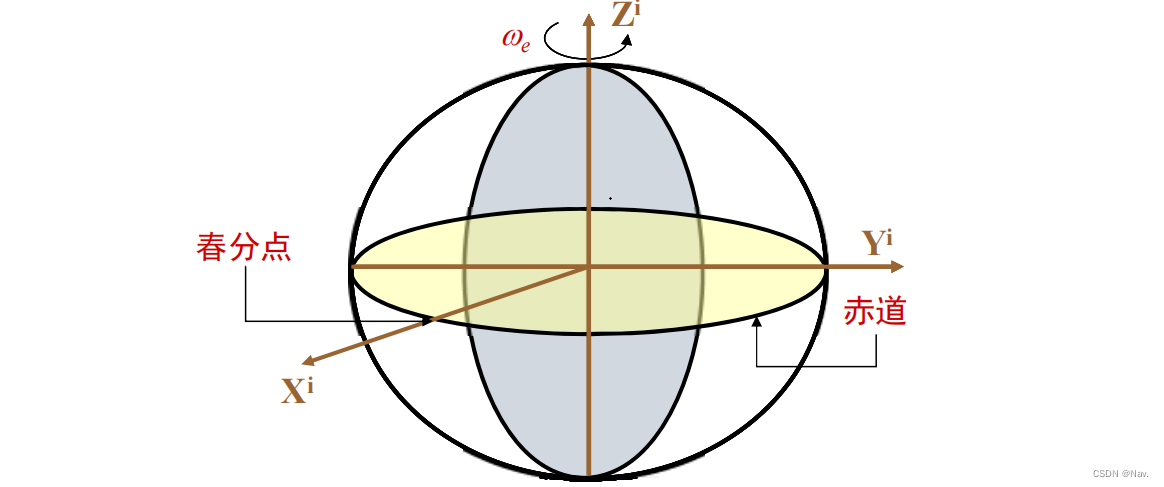
1 地心惯性坐标系(i系)
惯性传感器的输出是以该坐标系为参考基准的。
讯享网
| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 地球中心 | 赤道平面内,指向春分点 | 沿地球自转轴,指向北极 | 按右手坐标系定义 |
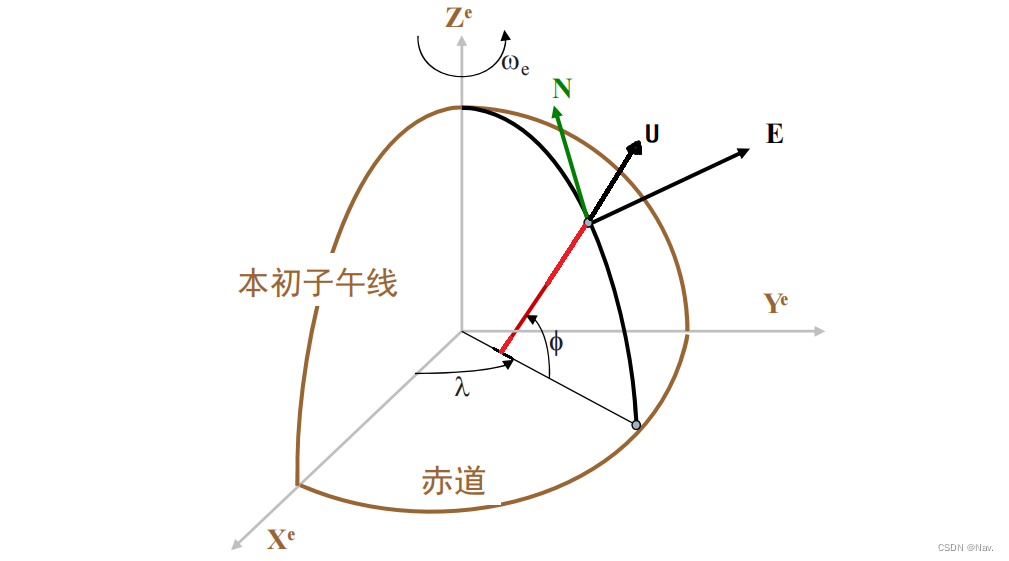
2 地球坐标系(e系)
地球坐标系相对于惯性坐标系的角速度大小就是地球自转角速率,其值通常取 ω i e \omega_{ie} ωie = 7. × 1 0 − 5 10_{}^{-5} 10−5rad/s = 15.0°/h。
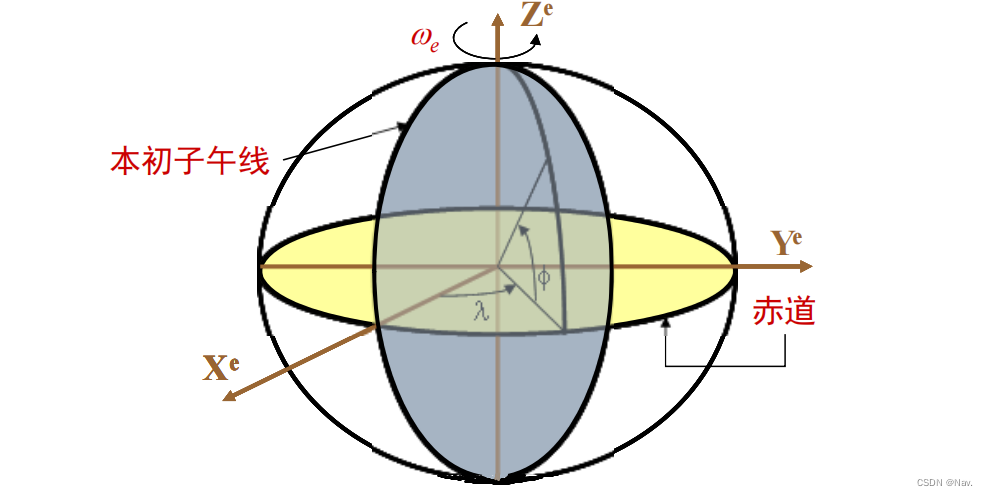
| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 地球中心 | 赤道平面内,指向本初子午线 | 沿地球自转轴,指向北极 | 按右手坐标系定义 |
3 地理坐标系(g系)
地理坐标系是一种当地水平坐标系,随运载体在地球表面移动而移动。
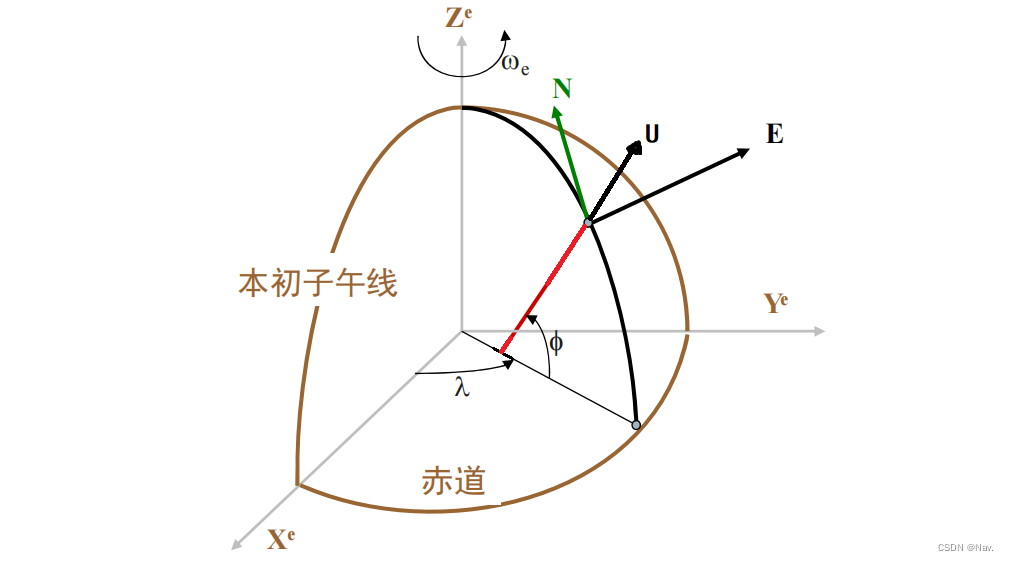
| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 运载体重心或中心 | 地理东向 | 垂直于当地椭球面,指向天向 | 地理北向 |
4 导航坐标系(n系)
一般选择“东 - 北 - 天”地理坐标系作为导航坐标系。
| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 运载体重心或中心 | 地理东向 | 垂直于当地椭球面,指向天向 | 地理北向 |
5 载体坐标系(b系)
以管道机器人为例,x轴沿载体横轴向右,y轴沿载体纵轴向前,z轴沿载体立轴向上。

| 原点 | X轴 | Z轴 | Y轴 |
|---|---|---|---|
| 运载体重心或中心 | 沿载体横轴向右 | 沿载体立轴向上 | 沿载体纵轴向前 |
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/53563.html