
1、简介
先上两张图第一张是淘宝实拍图,第二张是结构图上面标明了引脚和输出逻辑。
这是一个波轮编码器,应用在相机等电子设备上。通过滚动这个编码器会发出脉冲。

讯享网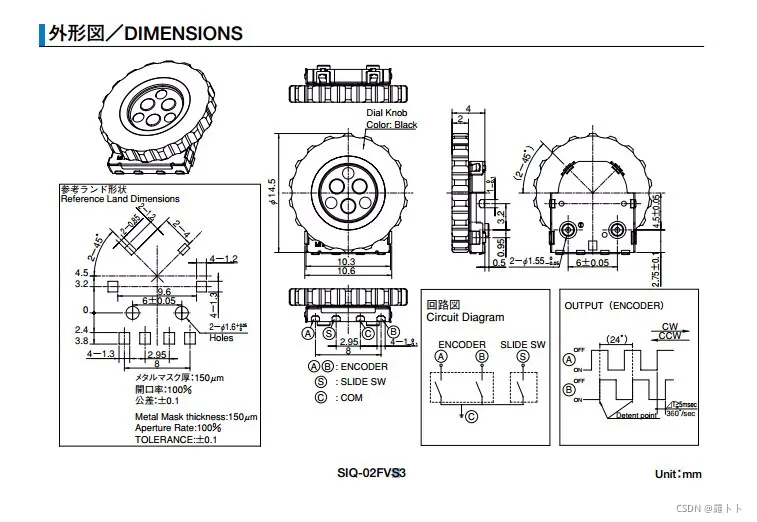
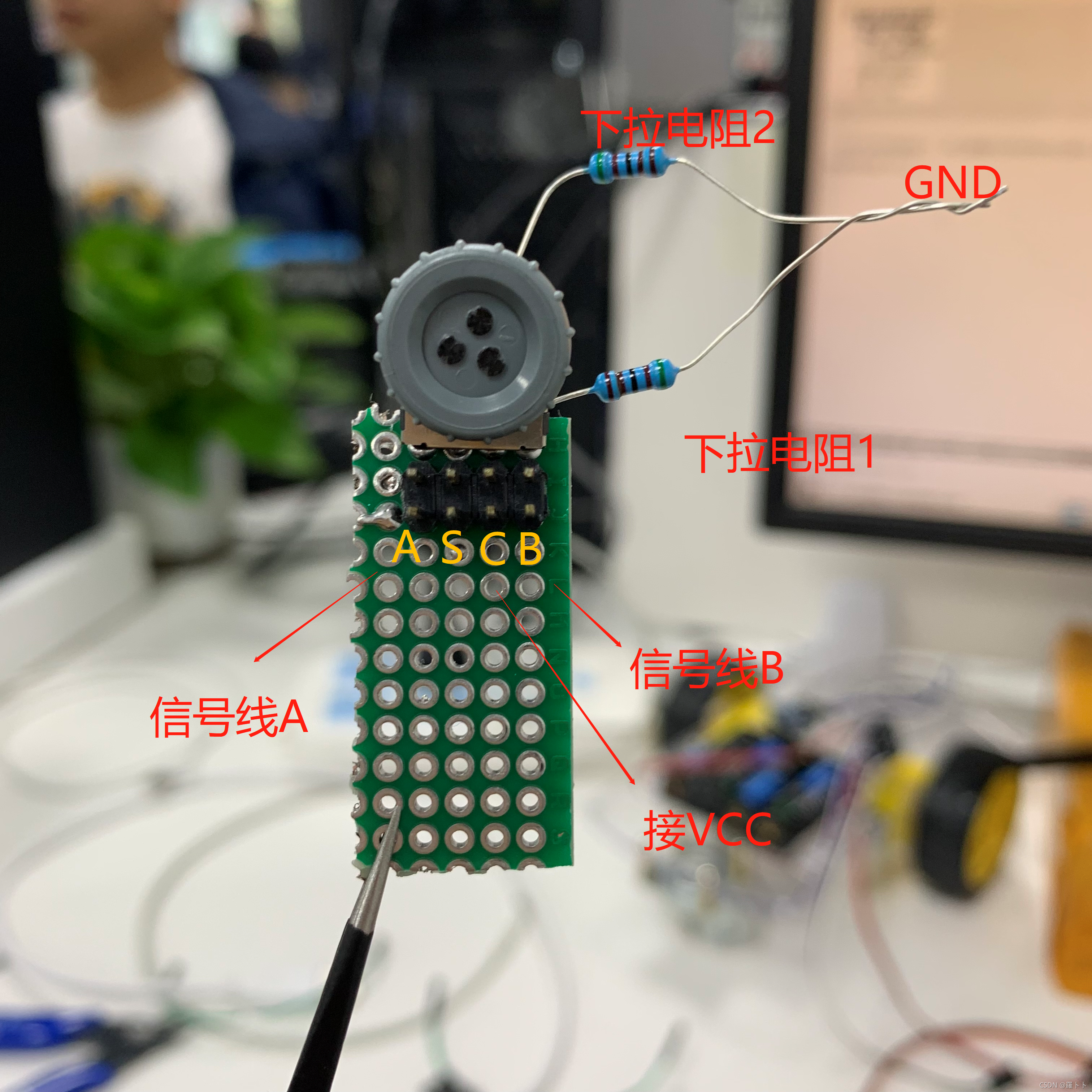
2、硬件连接
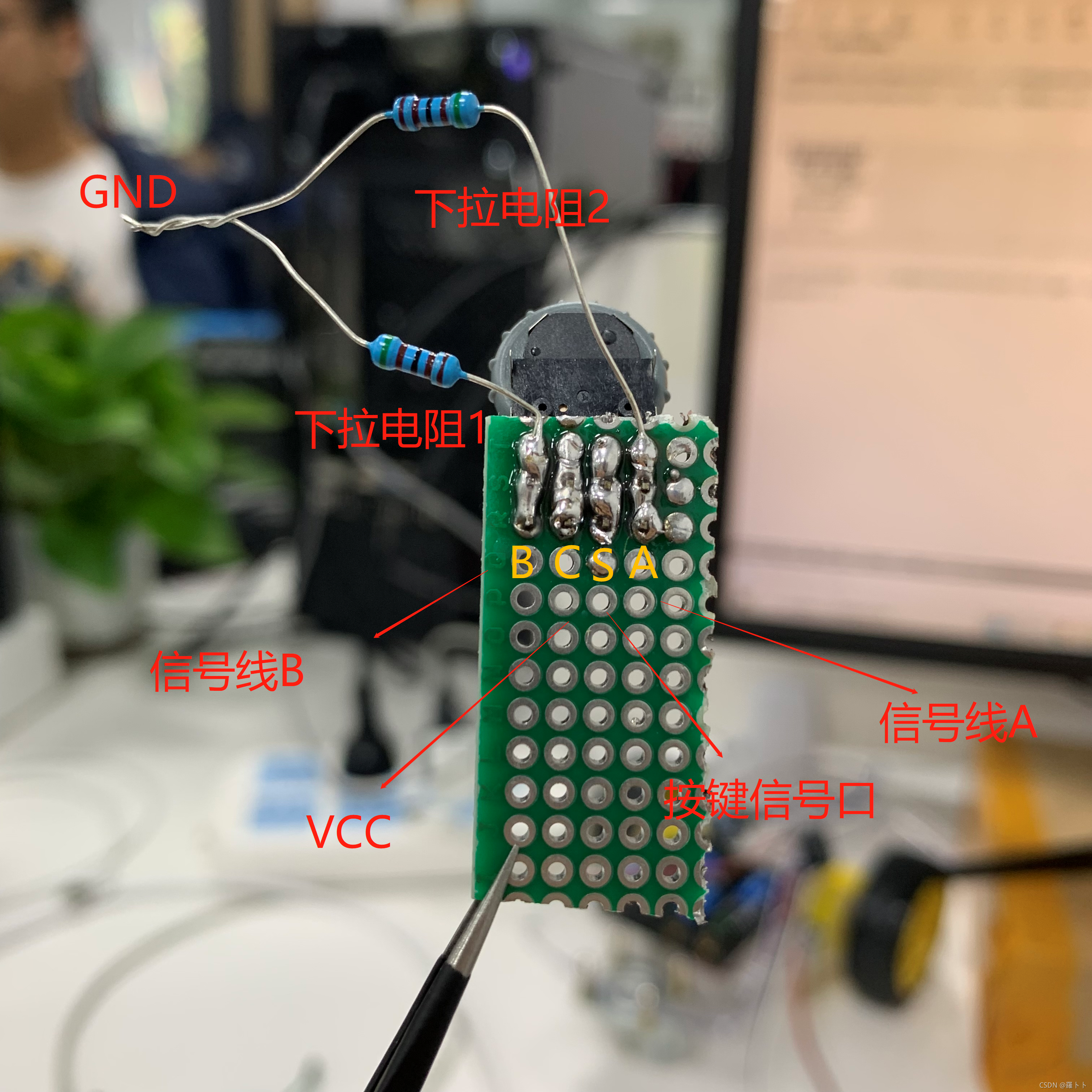
根据结构图可以看出引脚由左至右为A S C B。AB代表编码器的信号输出引脚,S代表开关信号输出引脚(此拨盘编码器从垂直方向可以被按下触发电平信号),C为COM口,需要VCC
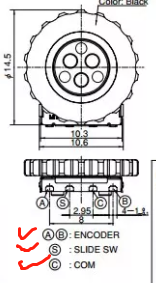
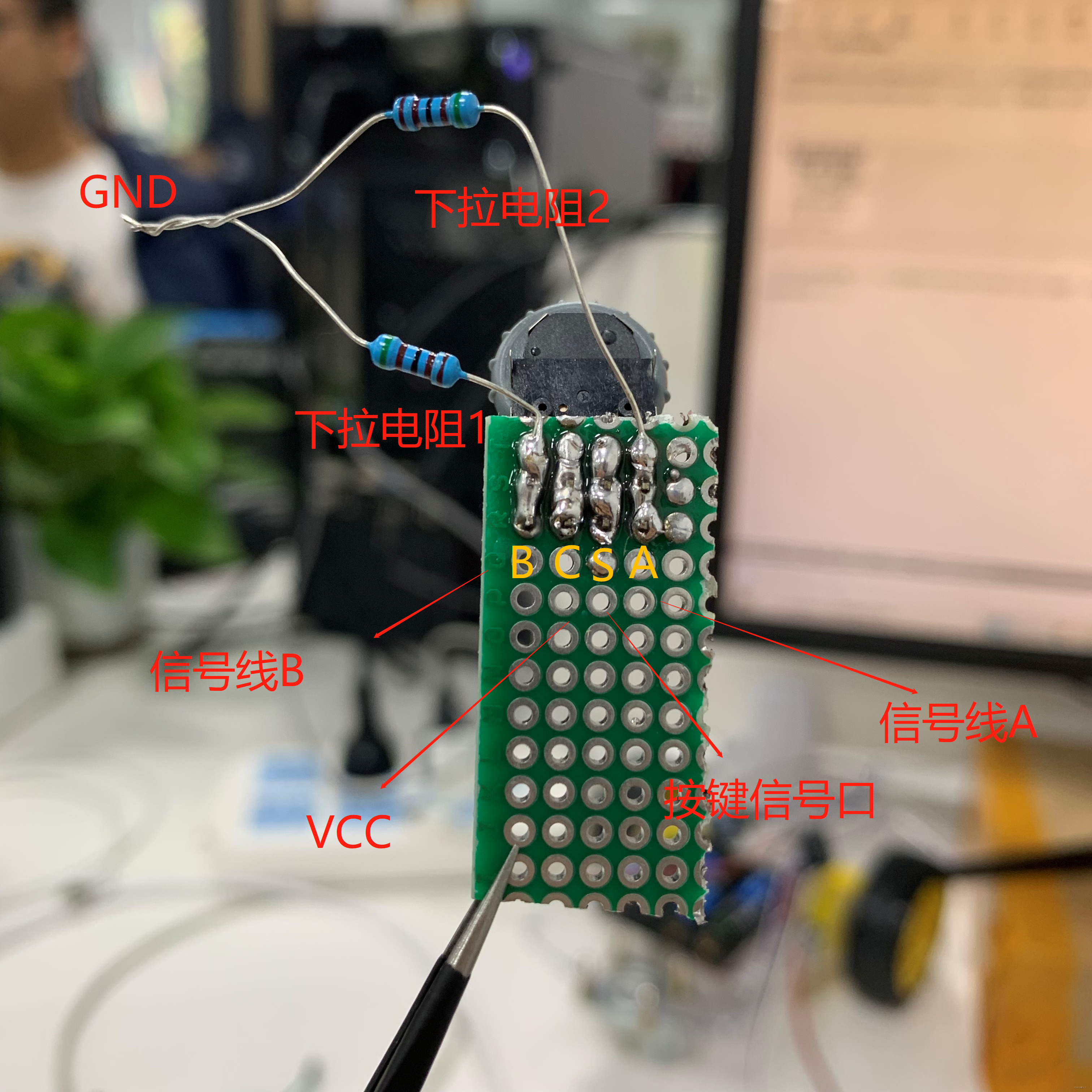
需要对A和B信号口进行下拉(通俗:AB各接一个电阻,然后捏在一起一同连接到GND)
3、软件测试
硬件:stm32f103zet6
外设:TFTLCD
程序说明:利用单片机自带的编码器模式,使用单片机的TIM4 CH1(PB6)和CH2(PB7)做脉冲输入口,A接PB6和B接PB7,利用单片机做正交解码。
void TIM4_Mode_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_ICInitTypeDef TIM_ICInitStructure; NVIC_InitTypeDef NVIC_InitStructure; //PB6 ch1 A,PB7 ch2 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//使能TIM4时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能GPIOA时钟 GPIO_StructInit(&GPIO_InitStructure);//将GPIO_InitStruct中的参数按缺省值输入 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//PA6 PA7浮空输入 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); TIM_DeInit(TIM4); TIM_TimeBaseStructInit(&TIM_TimeBaseStructure); TIM_TimeBaseStructure.TIM_Period = 15*4; //设定计数器重装值 TIMx_ARR = 359*4 TIM_TimeBaseStructure.TIM_Prescaler = 0; //TIM3时钟预分频值 TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1 ;//设置时钟分割T_dts = T_ck_int TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_BothEdge ,TIM_ICPolarity_BothEdge); //使能编码器模式3,上升下降都计数 TIM_ICStructInit(&TIM_ICInitStructure);//将结构体中的内容缺省输入 TIM_ICInitStructure.TIM_ICFilter = 6; //选择输入比较滤波器 值=1~16 TIM_ICInit(TIM4, &TIM_ICInitStructure);//将TIM_ICInitStructure中的指定参数初始化TIM4 // TIM_ARRPreloadConfig(TIM4, ENABLE);//使能预装载值 TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除TIM4的更新标志位 TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);//运行更新中断 //Reset counter TIM4->CNT = 0;// TIM_Cmd(TIM4, ENABLE); //启动TIM4定时器 } void TIM4_IRQHandler(void) { if(TIM4->SR&0x0001)//溢出中断 { ; } TIM4->SR&=~(1<<0);//清除终端标志位 } 讯享网
附上代码完整工程链接
https://download.csdn.net/download/lowbob/
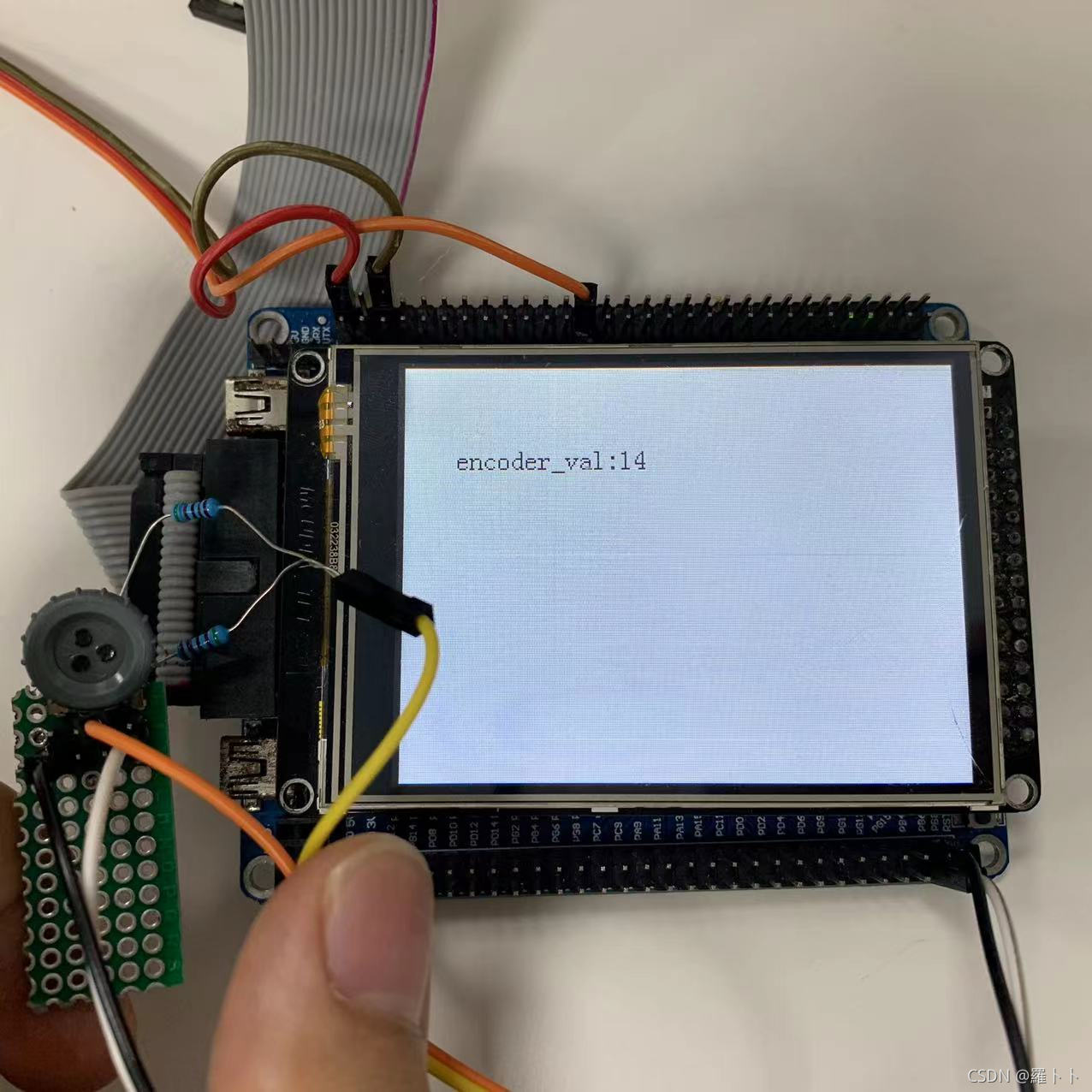
4、现象
每波动一次波轮正转计数会加一,反之减一,总数为15。
可以修改TIM_TimeBaseStructure.TIM_Period = 15*4; //设定计数器重装值 TIMx_ARR = 15*4这里的15
来修改总数。
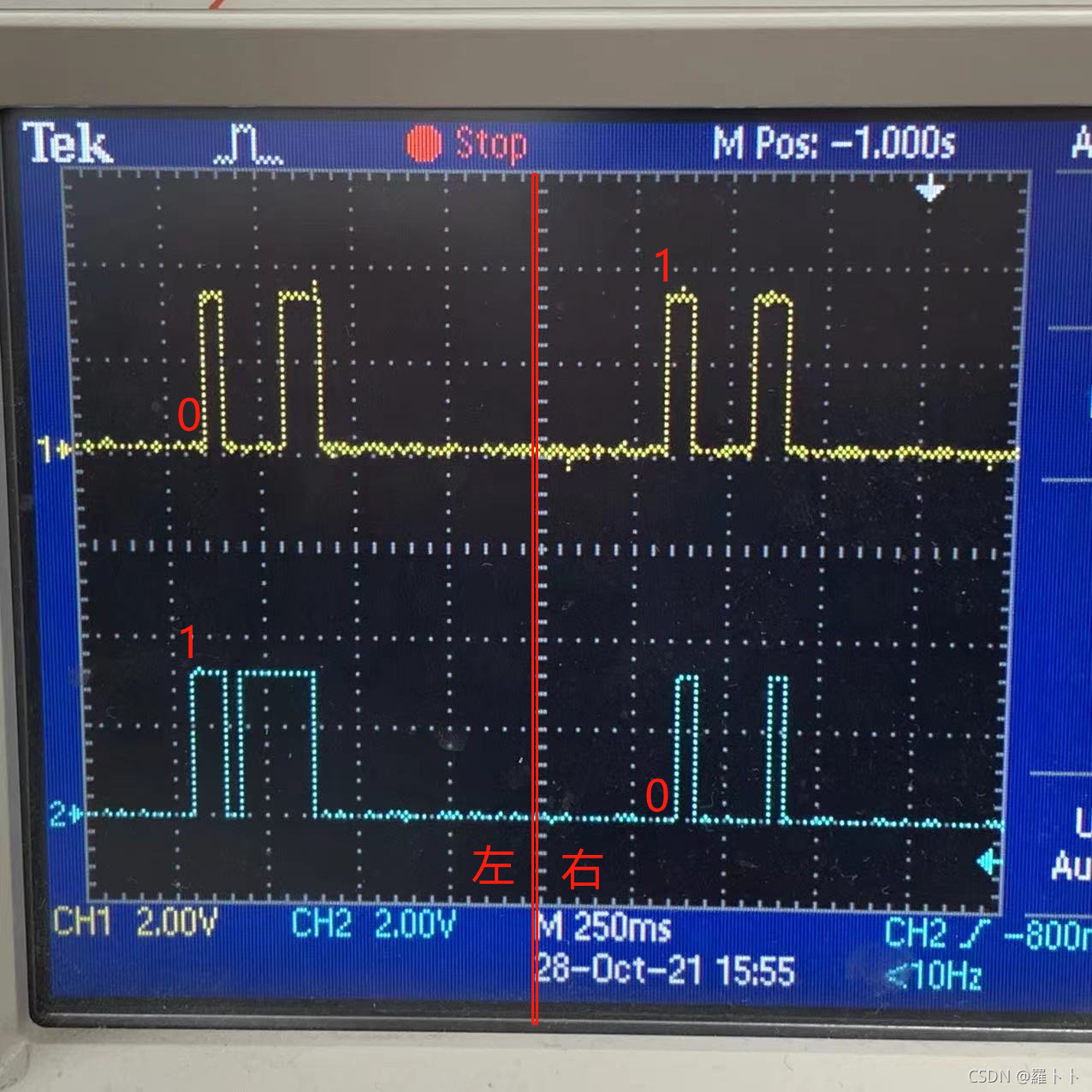
将波轮编码器输出的信号接上示波器,我用手拨动波轮正反转,可以发现左边蓝色信号的上升沿比黄色的提前,那么这一组信号记作01信号,右边黄色信号比蓝色信号的上升沿提前,记作10信号。由此可以来界定是正转还是反转。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/53149.html