
1.引言
在当今过程控制中,PID当然是用的最多的控制方法,但MPC也超过了10%的占有率。MPC是一个总称,有着各种各样的算法。其动态矩阵控制(DMC)是代表作。DMC采用的是系统的阶跃响应曲线,其突出的特点是解决了约束控制问题。那么是DMC是怎么解决约束的呢?在这里只给出宏观的解释,而不做详细的说明。DMC把线性规划和控制问题结合起来,用线性规划解决输出约束的问题,同时解决了静态最优的问题,一石二鸟,在工业界取得了极大的成功。
2.作用机理
MPC作用机理描述为:在每一个采用时刻,根据获得的当前测量信息,在线求解一个有限时间开环优化问题,并将得到的控制序列的第一个元素作用于被控对象。在下一个采样时刻,重复上述过程:用新的测量值作为此时预测系统未来动态的初始条件,刷新优化问题并重新求解 。
即MPC算法包括三个步骤:
(1)预测系统未来动态;
(2)(数值)求解开环优化问题;
(3)将优化解的第一个元素(或者说第一部分)作用于系统
这三步是在每个采样时刻重复进行的,且无论采用什么样的模型,每个采样时刻得到的测量值都作为当前时刻预测系统未来动态的初始条件
在线求解开环优化问题获得开环优化序列是MPC和传统控制方法的主要区别,因为后者通常是离线求解一个反馈控制律,并将得到的反馈控制律一直作用于系统。
在这里给出两点说明:
1.MPC是一个反馈控制策略,但是之前不是说将得到的控制序列中的第一个元素作用于被控对象,求解开环问题。那么哪来的反馈呢?
实际上在下一个采样周期,下一时刻的测量值又被使用上了,用下一时刻的测量值求解下一时刻的控制值。故这是一个反馈控制策略
2.传统的控制方法为什么被称为离线控制?
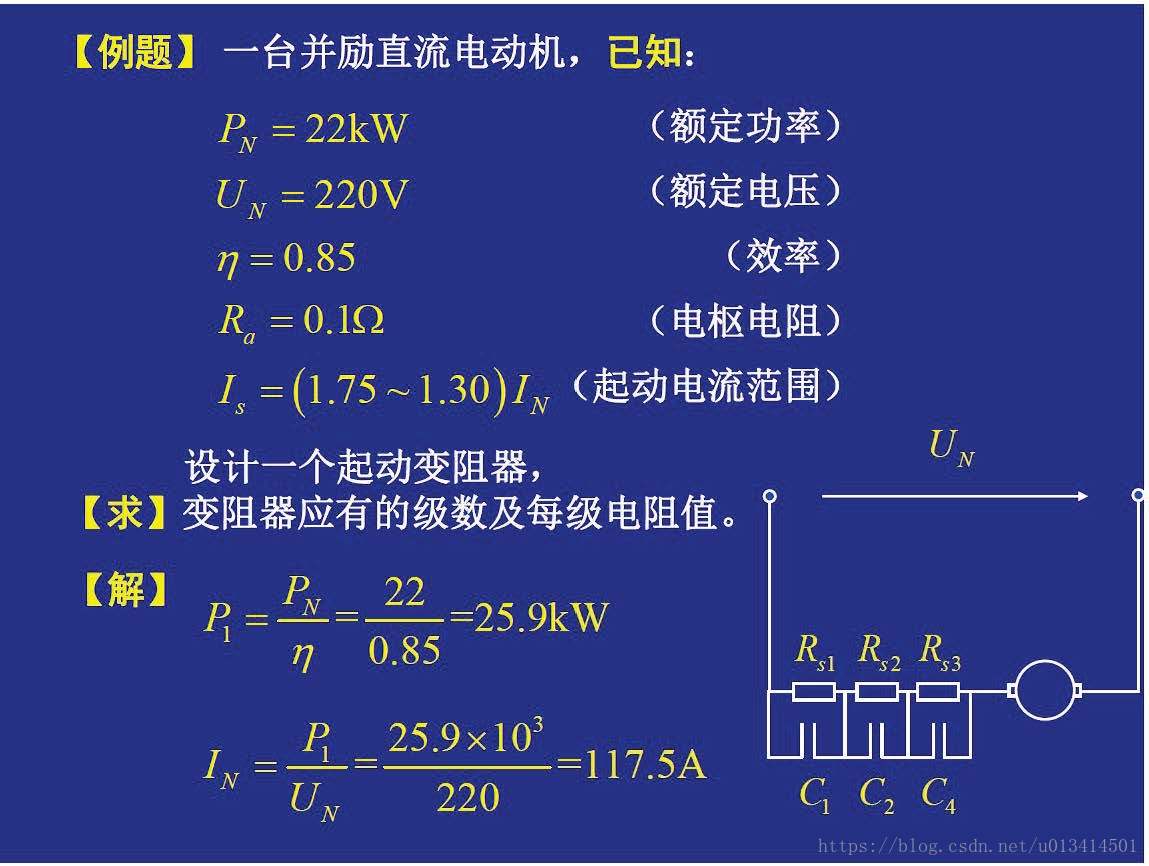
举例说明:
讯享网
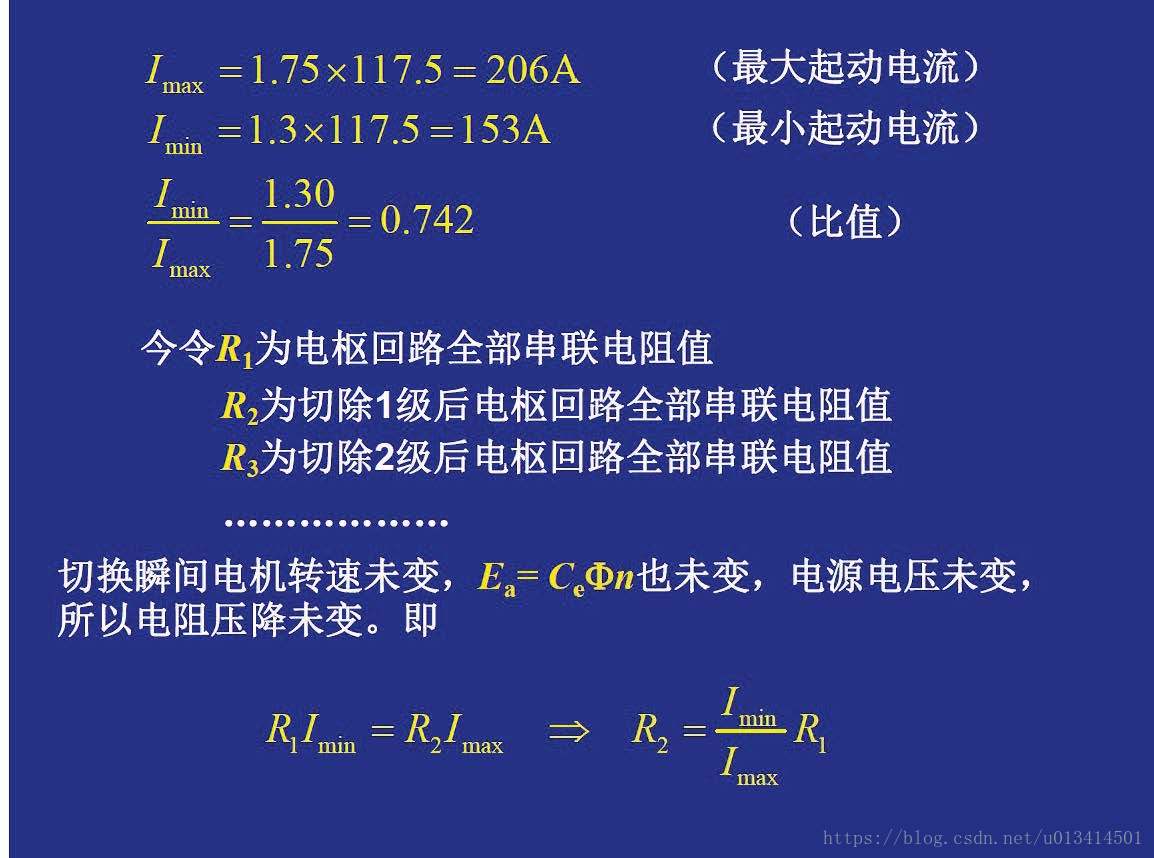
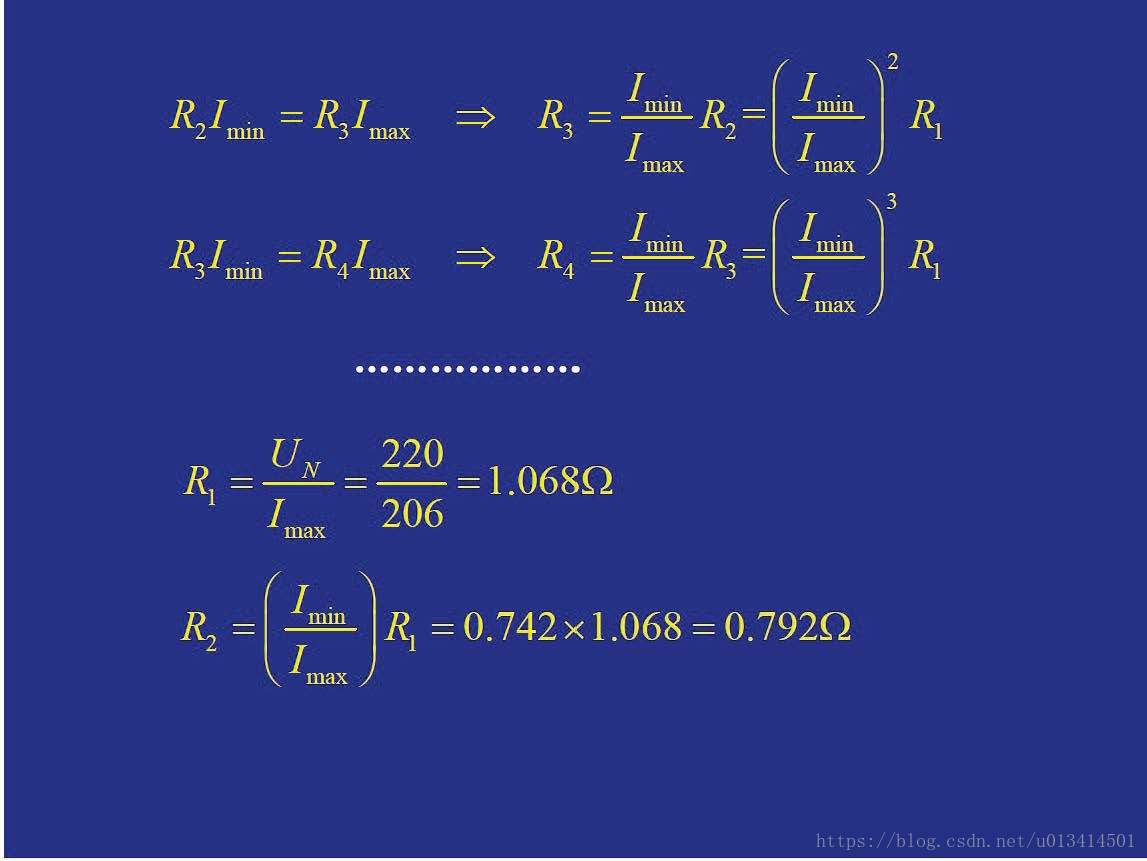
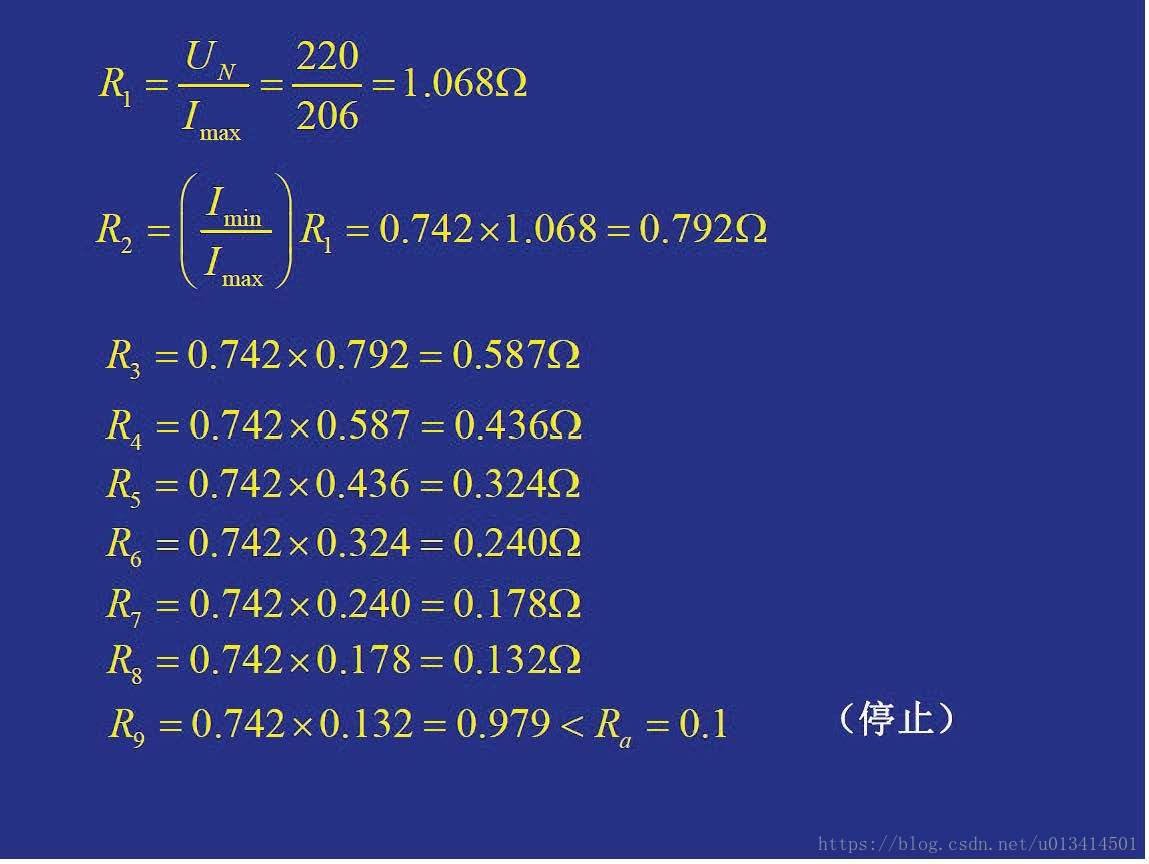
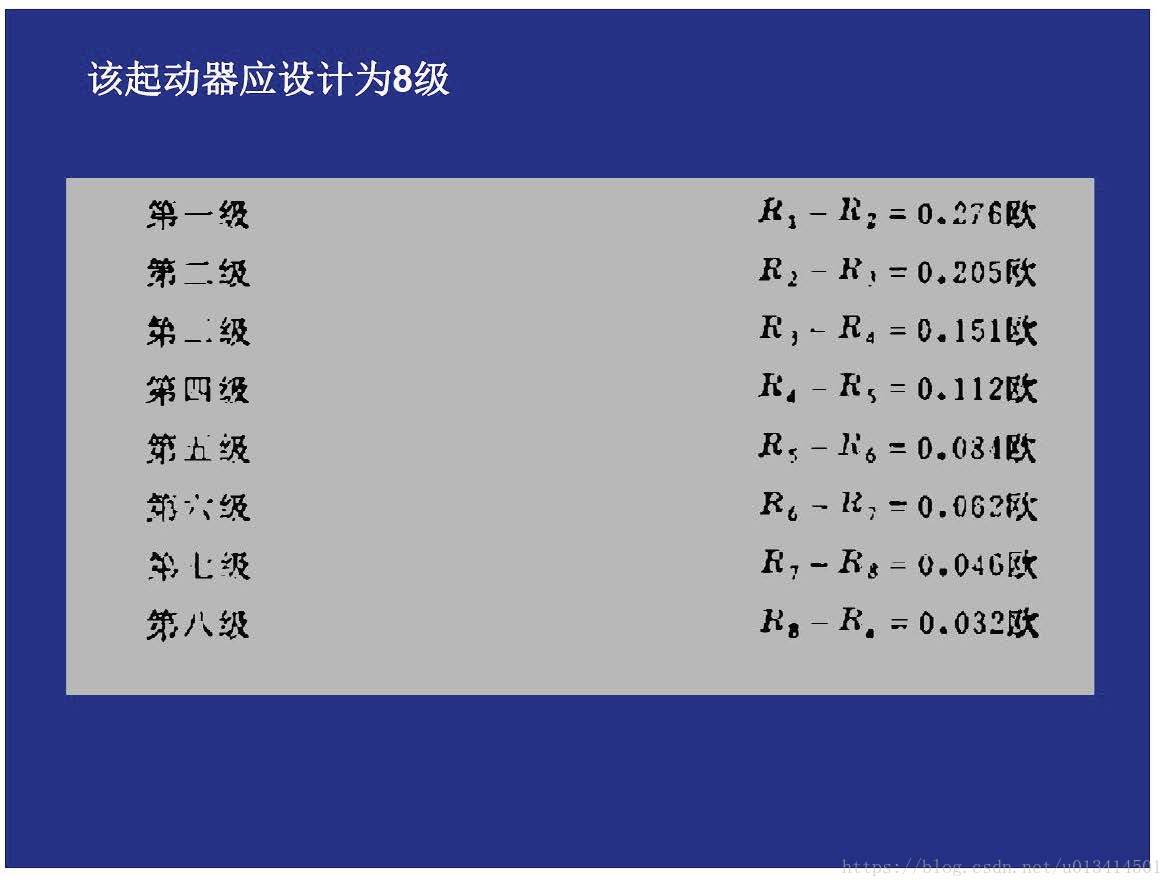
上面几张图片是设计变阻器应有的级数来达到控制并励直流电动机启动的例子,那么如何看的出来是离线控制呢?其实很简单,在起始的时候就已经把每级电阻值就给定出来了,但是实际上是否能如理论计算的这样呢?比如我电压突然受到了扰动了怎么办?那么这个计算的每级电阻值肯定不对了啦,但是传统的控制方法对此确是无能为力的,因为每级启动电阻在最早的时候已经计算好了的。
3.MPC的基本特点
不管是何种算法,他们的基本特点都是:基于模型的预测、滚动优化和前馈-反馈的控制结构。
在这里我重点讲解一下状态空间模型。那么什么是状态?输出是不是也是状态的一种?对的,输出也是一种状态,只不过我们赋予了这个状态特殊的意义。举个例子来说,舞龙,假设是只能通过龙尾的人A指挥前面一个人B动作,然后B指挥他前面的一个人C动作….依次如此,达到控制龙头的人F叼住绣球的动作。如果只关注龙头的人(输出)和龙尾的人(输入),而忽略龙身子的动态,那就是所谓的输入—输出系统。经典控制理论就是建立在输入—输出系统的基础上面的。 但是我如果不管要管龙尾和龙头的人,我连龙身子上面的人也要要求在固定的位置,那么这就是状态空间的概念,即我对系统中的每一个状态都要控制到。龙头位置的人也是一个状态,故输出本身就是一个状态,或者说是状态的一个组合。
故预测控制不是采用一个不变的全局优化目标,而是采用时间向前滚动式的有限时域优化策略。这也就是意味着优化过程不是一次离线进行,而是反复在线进行的。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/47148.html