
前言
在进行canvas绘图的过程中我遇到了一个问题:我想将圆心与圆的边线上的某个点进行连线,我需要基于圆心坐标、圆半径和连线的角度去计算圆边点的坐标,这实际就是测量学中的坐标正算。
1.坐标正算介绍
坐标正算的概念如下:
根据直线起点的坐标、直线的水平距离及其坐标方位角来计算直线终点的坐标,称为坐标正算。
坐标正算的计算公式 如下:


2.坐标正算的原理
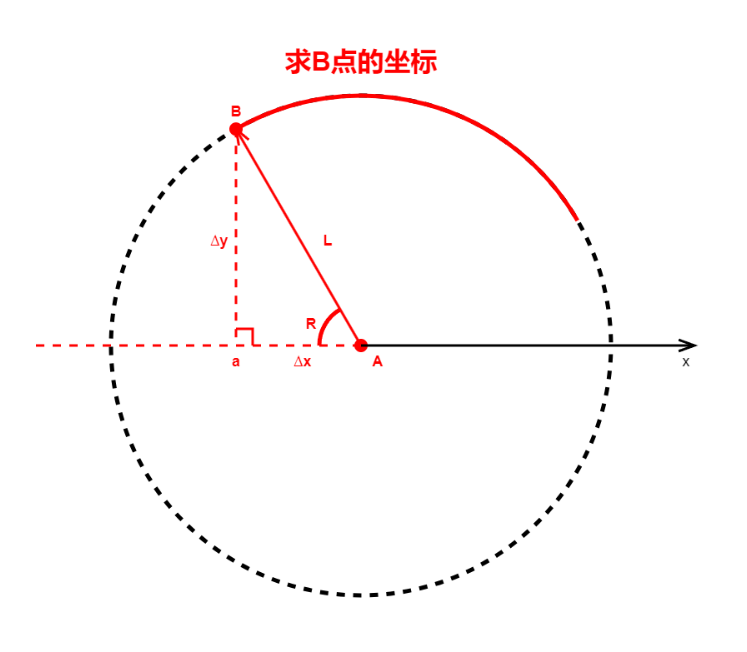
在上图中,已知A点的坐标,要求B点的坐标。可以看出用A点的坐标减去∆x、∆y这两个值就可以算出B点的坐标;而∆x、∆y这两个值都可以用三角函数sin(R)和cos(R)算出 ;R是直线AB的象限角,可以通过方位角αAB计算出象限角R。
因此坐标正算的步骤如下:
第一步,根据方位角计算出象限角
第二步,使用三角函数计算出坐标增量
第三步,用起始点坐标加减坐标增量得到未知的结束点坐标
3.坐标方位角与象限角
我们先了解一下测量学中坐标方位角和象限角的概念:
坐标方位角是平面直角坐标系中某一直线与坐标主轴(X轴正北向)之间的夹角,从主轴起算,顺时针方向旋转。
以基本方向的北端或南段算起,顺时针或逆时针方向量至直线的水平角,称为象限角。
但是注意canvas坐标系与测量学的平面直角坐标系是有区别的,
- canvas坐标系中向右为x轴正方向,向下为y轴正方向
- 测量平面直角坐标系中向上为x轴正方向,向右为y轴正方向
因此在canvas当中坐标方位角为从x轴正方向开始顺时针旋转到某一直线的角度;象限角为某一直线沿顺时针或逆时针到x轴的角度。
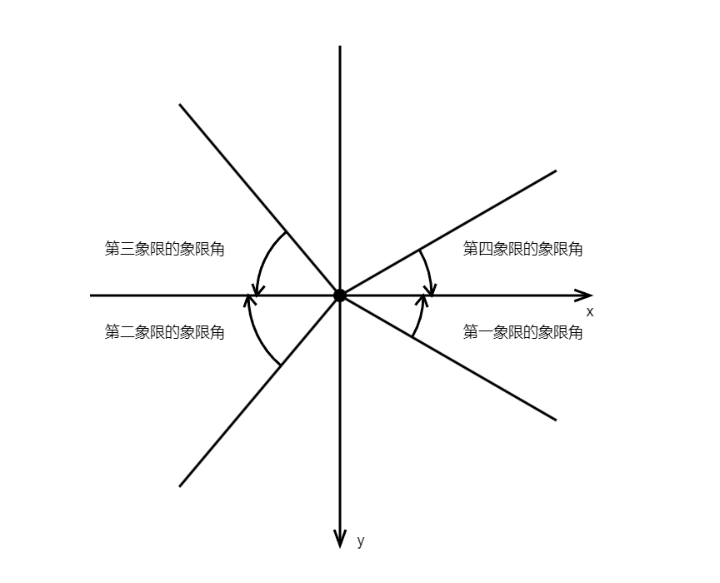
象限角与坐标方位角的转换方式如下:
| 坐标方位角及其所在的象限 |
方位角转象限角 |
象限角转方位角 |
| 0° ~ 90° (第一象限) |
R = α |
α = R |
| 90° ~ 180° (第二象限) |
R = 180° - α |
α = 180° - R |
| 180° ~ 270° (第三象限) |
R = α - 180° |
α = R + 180° |
| 270° ~ 360° (第四象限) |
R = 360° - α |
α = 360° - R |
转换成代码就是:
if ( α >= 0 && α < 90) { R = α } else if (α >= 90 && α < 180) { R = 180 - angle } else if (α >= 180 && α < 270) { R = α - 180 } else { R = 360 - α } 讯享网
4.通过三角函数求坐标增量
坐标增量∆x和∆y可以通过三角函数计算出来,公式如下:
∆x = cos(θ) * L
∆y = sin(θ) * L
公式的推导过程如下:
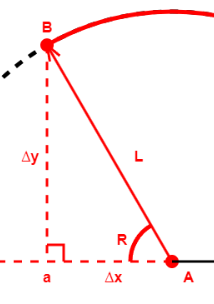
下图中的三角形ABa是一个直角三角形所以可以使用三角函数。因为sin() = 对边/斜边cos() = 临边/斜边,所以sin(R) = ∆y / L cos(R) = ∆x / L。最后就可以推导出 ∆x = cos(θ) * 300 ∆y = sin(θ) * 300。
上面的公式可以用如下的代码表示:
讯享网// l是线段的长度 ∆x = Math.cos(R * 180 / Math.PI) * L ∆y = Math.sin(R * 180 / Math.PI) * L
注意:JS的Math.cos()和Math.sin()方法都只接收弧度制角度作为参数 ,所以普通角度要先乘以 π / 180° 转换为弧度制。
5. 起始点坐标加减坐标增量
在上一节中我们计算出了坐标增量,现在只需要用起始点A的坐标减去坐标增量就可以求出B点的坐标。

由于在上图中B点位于A点的左上方,而在canvas坐标系中越往左x坐标越小,越往上y坐标越小,所以这里要用B点的坐标减坐标增量。
XB = XA - ∆x
YB = YA - ∆y
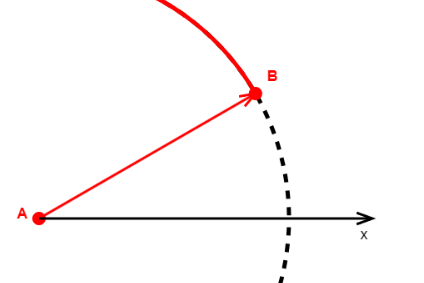
但是难道所有情况下都是这样计算吗?答案显然是否定的。例如下面的例子中B点就在A点的右上方,因此根据canvas坐标系的规则此时的计算方式就应该是:
XB = XA + ∆x
YB = YA - ∆y
实际上对于坐标增量有如下的两种解释:
(1)坐标增量绝对值说
这种理解的核心观点是:“坐标增量∆x、∆y代表两条线段的长度,所以它们都是正数”。但是与此同时在根据线段的坐标方位角不同,未知点的计算方式也不同,可能是已知点坐标减坐标增量,也可能是已知点坐标加坐标增量。所以计算公式如:
XB = XA ± ∆x
YB = YA ± ∆y
方位角与计算方式的关系如下:
| 坐标方位角及其所在的象限 |
未知点的计算方式 |
| 0° ~ 90° (第一象限) |
XB = XA + ∆x YB = YA + ∆y |
| 90° ~ 180° (第二象限) |
XB = XA - ∆x YB = YA + ∆y |
| 180° ~ 270° (第三象限) |
XB = XA - ∆x YB = YA - ∆y |
| 270° ~ 360° (第四象限) |
XB = XA + ∆x YB = YA - ∆y |
(2)坐标增量有符号说
这种解释的核心是“坐标增量是线段两点的坐标差值,因此坐标增量有正有负”。所以计算公式为:
XB = XA + ∆x
YB = YA + ∆y
而坐标增量的符号与坐标方位角有关,它们的关系如下:
| 坐标方位角及其所在的象限 |
∆x的符号 |
∆y的符号 |
| 0° ~ 90° (第一象限) |
+ |
+ |
| 90° ~ 180° (第二象限) |
- |
+ |
| 180° ~ 270° (第三象限) |
- |
- |
| 270° ~ 360° (第四象限) |
+ |
- |
当然无论基于上面的那种解释,最后实际上都是殊途同归,上面的公式可以转换为如下的代码:
if (angle >= 0 && angle < 90) { XB = XA + ∆x YB = YA + ∆y } else if (angle >= 90 && angle < 180) { XB = XA - ∆x YB = YA + ∆y } else if (angle >= 180 && angle < 270) { XB = XA - ∆x YB = YA - ∆y } else { XB = XA + ∆x YB = YA - ∆y } 5.封装坐标正算的方法
讯享网/ * * @param {Array} startPoint 起始点坐标 * @param {number} length 线段长度 * @param {number} angle 坐标方位角 */ function calcCoordinate(startPoint, length, angle) { // 第一步:计算象限角 let qAngle // 象限角 if (angle >= 0 && angle < 90) { qAngle = angle } else if (angle >= 90 && angle < 180) { qAngle = 180 - angle } else if (angle >= 180 && angle < 270) { qAngle = angle - 180 } else { qAngle = 360 - angle } // 第二步:计算坐标增量 const _x = Math.cos((qAngle * Math.PI) / 180) * length const _y = Math.sin((qAngle * Math.PI) / 180) * length // 第三步:求未知点坐标 let result const [x, y] = startPoint if (angle >= 0 && angle < 90) { result = [x + _x, y + _y] } else if (angle >= 90 && angle < 180) { result = [x - _x, y + _y] } else if (angle >= 180 && angle < 270) { result = [x - _x, y - _y] } else { result = [x + _x, y - _y] } return result }
参考资料
- 工程测量(第二版)第六章 直线方位角测量
- 测量员系列二:坐标正反算
- 方位角与象限角的关系—博客园
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/43013.html