
若将状态看作为属性,动作看作为标记,易知:监督学习和强化学习都是在试图寻找一个映射,从已知属性/状态推断出标记/动作,这样强化学习中的策略相当于监督学习中的分类/回归器。但在实际问题中,强化学习并没有监督学习那样的标记信息,通常都是在尝试动作后才能获得结果,因此强化学习是通过反馈的结果信息不断调整之前的策略,从而算法能够学习到:在什么样的状态下选择什么样的动作可以获得最好的结果。
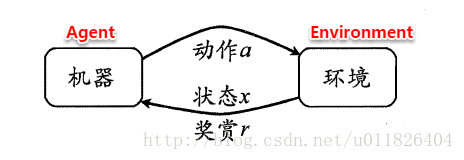
状态(X):机器对环境的感知,所有可能的状态称为状态空间;
动作(A):机器所采取的动作,所有能采取的动作构成动作空间;
转移概率(P):当执行某个动作后,当前状态会以某种概率转移到另一个状态;
奖赏函数(R):在状态转移的同时,环境给反馈给机器一个奖赏。

因此,强化学习的主要任务就是通过在环境中不断地尝试,根据尝试获得的反馈信息调整策略,最终生成一个较好的策略π,机器根据这个策略便能知道在什么状态下应该执行什么动作。常见的策略表示方法有以下两种:
确定性策略:π(x)=a,即在状态x下执行a动作;
随机性策略:P=π(x,a),即在状态x下执行a动作的概率。
一个策略的优劣取决于长期执行这一策略后的累积奖赏,换句话说:可以使用累积奖赏来评估策略的好坏,最优策略则表示在初始状态下一直执行该策略后,最后的累积奖赏值最高。长期累积奖赏通常使用下述两种计算方法:
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/37243.html