
在调试三轴跟踪云台时遇到了PID控制问题。研究过程中不可避免用到自动控制系统的性能指标,学习总结了一下经典教材中的相关内容。本文包括如下内容:
- 控制系统的数学模型
- 时域模型
- 复域模型
- 控制系统的性能指标
- 典型输入信号
- 动态过程与动态性能指标
- 稳态过程与稳态性能指标
控制系统的数学模型
在控制系统的分析设计中,首先要建立控制系统的数学模型,数学模型是描述系统内部物理量(或变量)之间的关系的数学表达式。建立控制系统数学模型的方法通常有分析法和实验法两种。
分析法
需要已知系统各部分依据的物理规律或化学规律列出相应方程。
实验法
实验法人为地给系统施加某种测试信号,记录其输出响应,并用适当的数学模型去逼近,这种方式又称为系统辨识。
在使用分析法进行系统建模时,常见的模型有时域模型、复域模型。
时域模型
复域模型
使用拉氏变换法求解线性系统的微分方程时,可以得到控制系统在复数域的数学模型:传递函数。传递函数不仅可以表征系统的动态性能,而且可以用来研究系统结构或参数变化对系统性能的影响。
传递函数定义
线性定常系统的传递函数G(s),定义为零初始条件下,系统输出量的拉氏变换C(s),与输入量的拉氏变换R(s)之比。

传递函数的性质
- 传递函数是复变量s的有理真分式函数,具有复变函数的所有性质。
- 传递函数是一种用系统参数表示输入量与输出量之间关系的表达式,只取决于系统或元件的结构和参数,而与输入量的形式无关。
- 传递函数与微分方程有相通性,两者(两个类型的系统模型)可以用d/dt与s互相置换的方式变换。
- G(s)的拉氏反变换是脉冲响应g(t),即脉冲函数δ(t)输入时的输出响应。
控制系统的性能指标
控制系统性能评价分为动态性能指标和稳态性能指标两类。为了求解系统的时间响应(我们关注的性质)。必须了解输入信号(即外作用)的解析表达式。然而在一般情况下,外加输入有随机性无法预知。
典型输入信号
研究分析系统的性能指标时,通常选择若干典型输入信号作为动态性能指标和稳态性能测试之用,典型输入信号包括:- 单位阶跃函数
- 单位斜坡函数
- 单位加速度函数
- 单位脉冲函数
- 正弦函数
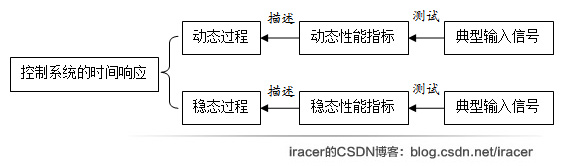
实际中采用上述哪种典型输入信号取决于系统常见的工作状态。同时,在所有可能的输入信号中,选择最不利的信号作为典型输入信号测试系统指标。在典型输入信号作用下,任何控制系统的时间响应都有动态过程和稳态过程两部分组成。因此,系统的时间响应、动态、稳态过程与动态、稳态性能指标以及典型输入信号的关系如下图所示。
动态过程与动态性能指标
动态过程
动态过程又称过渡过程或瞬态过程,指系统在典型输入信号作用下,系统输出量从初始状态到最终状态的响应过程。由于实际控制系统具有惯性、摩擦及其他原因,系统输出量不可能完全复现输入量的变化。根据系统结构和参数的选择,动态过程表现为衰减、发散、等幅振荡等形式。
动态性能
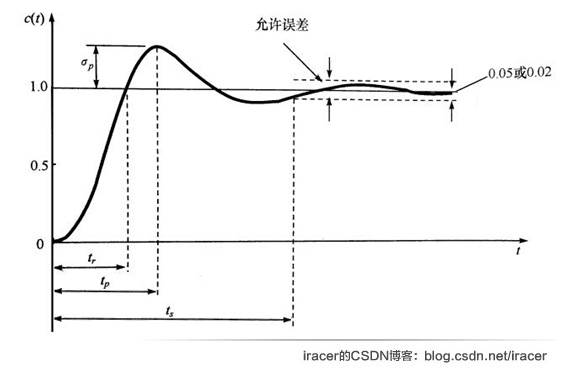
系统的动态过程提供系统稳定性、响应速度及阻尼情况,由动态性能指标描述。通常在阶跃函数作用下,测定或计算系统的动态性能。描述稳定的系统在单位阶跃函数的作用下,动态过程随时间t的变化状况的指标,称为动态性能指标。系统的单位阶跃响应如下图所示。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/36669.html