
Dijkstra算法是路径规划算法中非常经典的一种算法,在很多地方都会用到,特别是在机器人的路径规划中,基本学习机器人运动相关的都会接触到该算法。Dijkstra算法本身的原理是基于贪心思想实现的,首先把起点到所有点的距离存下来找个最短的,然后松弛一次再找出最短的,所谓的松弛操作就是,遍历一遍看通过刚刚找到的距离最短的点作为中转站会不会更近,如果更近了就更新距离,这样把所有的点找遍之后就存下了起点到其他所有点的最短距离。
迪杰斯特拉(Dijkstra)算法是典型最短路径算法,用于计算一个节点到其他节点的最短路径。它的主要特点是以起始点为中心向外层层扩展(广度优先搜索思想),直到扩展到终点为止。
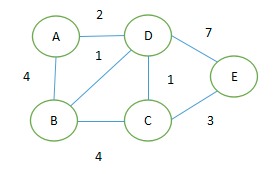
这样一个有权图,Dijkstra算法可以计算任意节点到其他节点的最短路径
讯享网
算法思路
1.指定一个节点,例如我们要计算 ‘A’ 到其他节点的最短路径
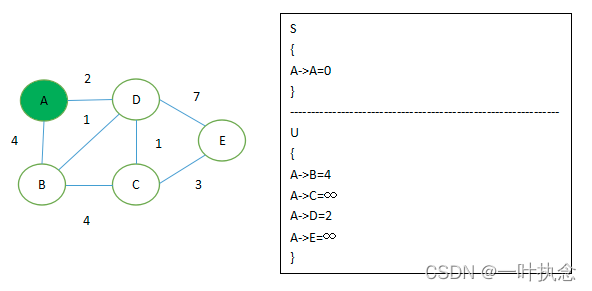
2.引入两个集合(S、U),S集合包含已求出的最短路径的点(以及相应的最短长度),U集合包含未求出最短路径的点(以及A到该点的路径,注意 如上图所示,A->C由于没有直接相连 初始时为∞)
3.初始化两个集合,S集合初始时 只有当前要计算的节点,A->A = 0,U集合初始时为 A->B = 4, A->C = ∞, A->D = 2, A->E = ∞,敲黑板!!!接下来要进行核心两步骤了
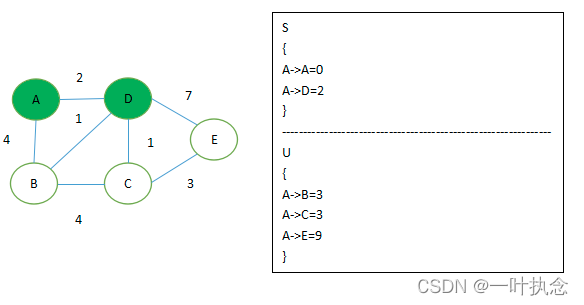
4.从U集合中找出路径最短的点,加入S集合,例如 A->D = 2
5.更新U集合路径,if ( ‘D 到 B,C,E 的距离’ + ‘AD 距离’ < ‘A 到 B,C,E 的距离’ ) 则更新U
6.循环执行 4、5 两步骤,直至遍历结束,得到A 到其他节点的最短路径
算法图解
1.选定A节点并初始化,如上述步骤3所示
2.执行上述 4、5两步骤,找出U集合中路径最短的节点D 加入S集合,并根据条件 if ( ‘D 到 B,C,E 的距离’ + ‘AD 距离’ < ‘A 到 B,C,E 的距离’ ) 来更新U集合
3.这时候 A->B, A->C 都为3,没关系。其实这时候他俩都是最短距离,如果从算法逻辑来讲的话,会先取到B点。而这个时候 if 条件变成了 if ( ‘B 到 C,E 的距离’ + ‘AB 距离’ < ‘A 到 C,E 的距离’ ) ,如图所示这时候A->B距离 其实为 A->D->B
例二.这个图表示的也非常清楚。
(以第4个顶点D为起点)
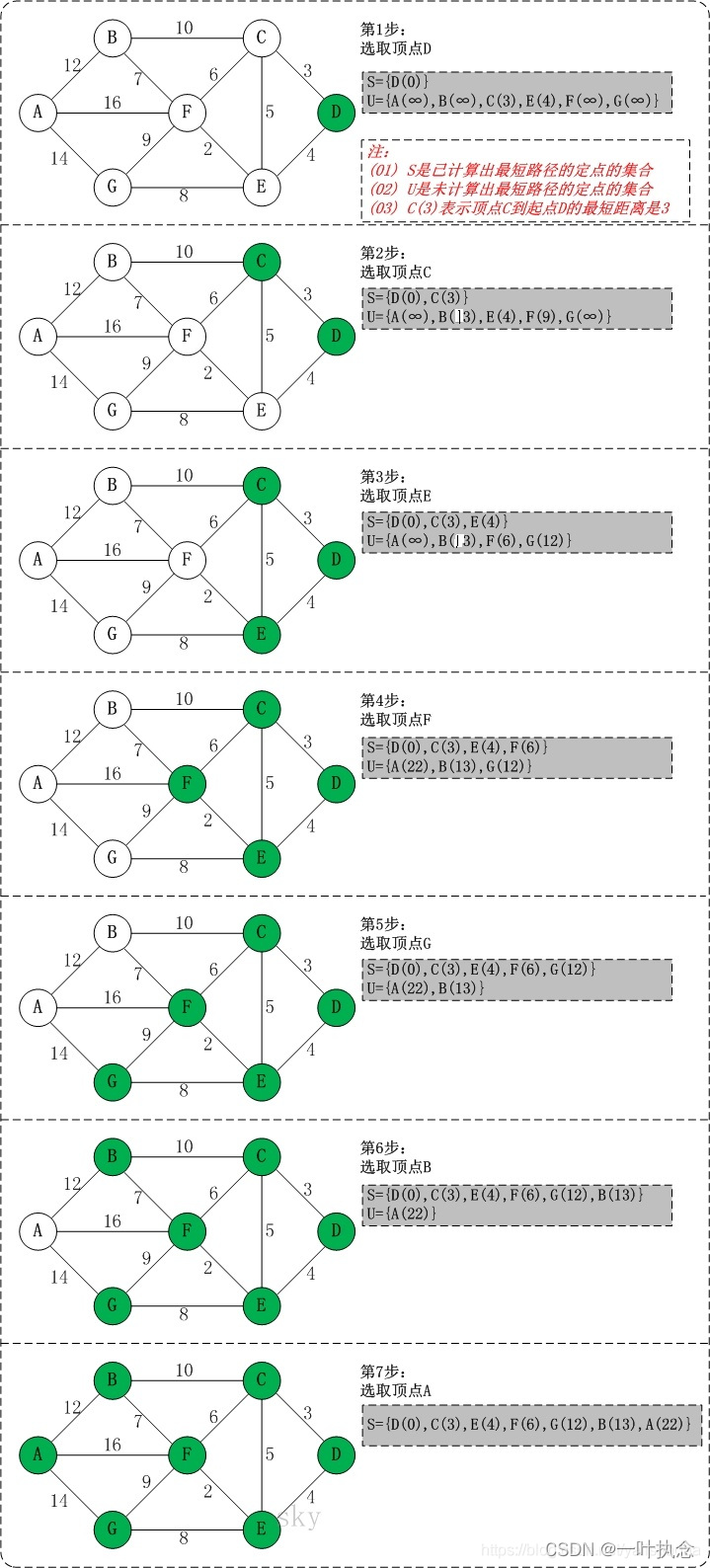
初始状态:S是已计算出最短路径的顶点集合,U是未计算除最短路径的顶点的集合!
第1步:将顶点D加入到S中。
此时,S={D(0)}, U={A(∞),B(∞),C(3),E(4),F(∞),G(∞)}。 注:C(3)表示C到起点D的距离是3。
第2步:将顶点C加入到S中。
上一步操作之后,U中顶点C到起点D的距离最短;因此,将C加入到S中,同时更新U中顶点的距离。以顶点F为例,之前F到D的距离为∞;但是将C加入到S之后,F到D的距离为9=(F,C)+(C,D)。
此时,S={D(0),C(3)}, U={A(∞),B(13),E(4),F(9),G(∞)}。
第3步:将顶点E加入到S中。
上一步操作之后,U中顶点E到起点D的距离最短;因此,将E加入到S中,同时更新U中顶点的距离。还是以顶点F为例,之前F到D的距离为9;但是将E加入到S之后,F到D的距离为6=(F,E)+(E,D)。
此时,S={D(0),C(3),E(4)}, U={A(∞),B(13),F(6),G(12)}。

此时,起点D到各个顶点的最短距离就计算出来了:A(22) B(13) C(3) D(0) E(4) F(6) G(12)。
Dijkstra算法与路径规划
Dijkstra算法是很有代表性的最短路径规划算法。一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表方式,路径规划采用OPEN,CLOSE表的方式。
大概过程:
创建两个表,OPEN, CLOSE。
OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。
1. 访问路网中里起始点最近且没有被检查过的点,把这个点放入OPEN组中等待检查。
2. 从OPEN表中找出距起始点最近的点,找出这个点的所有子节点,把这个点放到CLOSE表中。
3. 遍历考察这个点的子节点。求出这些子节点距起始点的距离值,放子节点到OPEN表中。
4. 重复2,3,步。直到OPEN表为空,或找到目标点。
代码实现:
import os import sys import math import heapq sys.path.append(os.path.dirname(os.path.abspath(__file__)) + "/../../Search_based_Planning/") from Search_2D import plotting, env class Dijkstra: """Dijkstra set the cost as the priority """ def __init__(self, s_start, s_goal, heuristic_type): self.s_start = s_start self.s_goal = s_goal self.heuristic_type = heuristic_type self.Env = env.Env() # class Env self.u_set = self.Env.motions # feasible input set self.obs = self.Env.obs # position of obstacles self.OPEN = [] # priority queue / OPEN set self.CLOSED = [] # CLOSED set / VISITED order self.PARENT = dict() # recorded parent self.g = dict() # cost to come def get_neighbor(self, s): """ find neighbors of state s that not in obstacles. :param s: state :return: neighbors """ #print([(s[0] + u[0], s[1] + u[1]) for u in self.u_set]) #print("__________") return [(s[0] + u[0], s[1] + u[1]) for u in self.u_set] def cost(self, s_start, s_goal): """ Calculate Cost for this motion :param s_start: starting node :param s_goal: end node :return: Cost for this motion :note: Cost function could be more complicate! """ if self.is_collision(s_start, s_goal): return math.inf return math.hypot(s_goal[0] - s_start[0], s_goal[1] - s_start[1]) def is_collision(self, s_start, s_end): """ check if the line segment (s_start, s_end) is collision. :param s_start: start node :param s_end: end node :return: True: is collision / False: not collision """ if s_start in self.obs or s_end in self.obs: return True if s_start[0] != s_end[0] and s_start[1] != s_end[1]: if s_end[0] - s_start[0] == s_start[1] - s_end[1]: s1 = (min(s_start[0], s_end[0]), min(s_start[1], s_end[1])) s2 = (max(s_start[0], s_end[0]), max(s_start[1], s_end[1])) else: s1 = (min(s_start[0], s_end[0]), max(s_start[1], s_end[1])) s2 = (max(s_start[0], s_end[0]), min(s_start[1], s_end[1])) if s1 in self.obs or s2 in self.obs: return True return False def extract_path(self, PARENT): """ Extract the path based on the PARENT set. :return: The planning path """ path = [self.s_goal] s = self.s_goal while True: s = PARENT[s] path.append(s) if s == self.s_start: break return list(path) def searching(self): """ Breadth-first Searching. :return: path, visited order """ self.PARENT[self.s_start] = self.s_start self.g[self.s_start] = 0 self.g[self.s_goal] = math.inf heapq.heappush(self.OPEN, (0, self.s_start)) while self.OPEN: _, s = heapq.heappop(self.OPEN) self.CLOSED.append(s) if s == self.s_goal: break #print(s) for s_n in self.get_neighbor(s): #print(s_n) new_cost = self.g[s] + self.cost(s, s_n) if s_n not in self.g: self.g[s_n] = math.inf if new_cost < self.g[s_n]: # conditions for updating Cost self.g[s_n] = new_cost self.PARENT[s_n] = s print(s_n) print(s) print("__________") # best first set the heuristics as the priority heapq.heappush(self.OPEN, (new_cost, s_n)) #print(self.g[s]) return self.extract_path(self.PARENT), self.CLOSED def main(): s_start = (38, 24) s_goal = (45, 25) dijkstra = Dijkstra(s_start, s_goal, 'None') plot = plotting.Plotting(s_start, s_goal) path, visited = dijkstra.searching() plot.animation(path, visited, "Dijkstra's") # animation generate if __name__ == '__main__': main() 讯享网
这个代码是来自于博客《路径规划算法》,简单做了点改动,方便理解。
算法的思路主要注意以下几点:
讯享网g[0,s+1] = g[0,s]+g[s,s+1]
在这样的两个原则下,Dijkstra算法就可以从已知环境中找到一条全局路径。它的思路主要分为以下几步:
1、将起点的cost值设置为0,起点以外的点的cost值设置为无穷大。 2、从起点开始遍历与当前点相邻的点,计算它们的cost值,如果比无穷大要小则更新为当前的cost值。 注意这里是一个循环,它当中维护了两个字典: 第一个用于保存每个点的cost值,用于计算g[0,s+1] = g[0,s]+g[s,s+1]; 第二个用于保存每个点与之相邻的点的坐标,即这个点是由于搜索哪个点附近的点所进行计算的。例如对[23,7]进行搜索时,会搜索[23,6]、[23,8]、[22,7]、[24,7]四个方向的点,则这四个点的相邻点坐标都为[23,7],即它们都是由[23,7]扩展出去的。这里很重要,用于回朔寻找路径。 3、循环执行步骤2,直到找到终点。 4、根据2中保存的第二个字典,回朔寻找出起点到终点的路径。 最终的效果如下:
参考:
讯享网https://blog.csdn.net/lbperfect123/article/details/
https://blog.csdn.net/yalishadaa/article/details/ 讯享网https://www.cnblogs.com/guxuanqing/p/9610780.html
https://blog.csdn.net/weixin_/article/details/?spm=1001.2101.3001.6650.11&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-11.no_search_link&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-11.no_search_link
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/33808.html