
第3章线性控制系统的能控性和能观性
能控性:是控制作用u(t)支配系统的状态向量x(t)的能力;回答u(t) 能否使x(t)作任意转移的问题。
能观性:是系统的输出y(t)反映系统状态向量x(t)的能力,反映从外 部对系统内部的观测能力。回答能否通过y(t)的量测确定状态 x(t)的问题。
线性定常系统的能控性判别:
1.约旦标准型系统的能控性判别:
无重根时:

讯享网
有重根时:

特殊情况:

※非奇异线性变换不改变系统的能控性
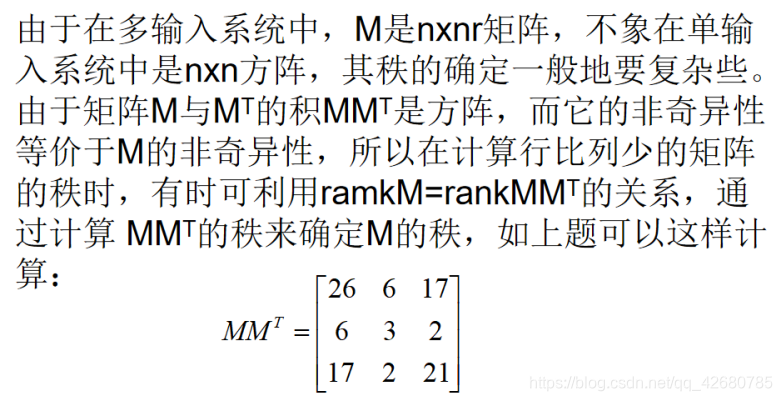
2.直接从(A, B)判别系统的能控性:

判断满秩的简单方法:
能观性:
由于能观测性所表示的是输出y(t) 反映状态向量x(t)的能力,与控制作用u(t)无直接关系,所以在分析能观测性问题时,可以不考虑控制作用的存在,只需从齐次状态方程和输出方程出发,如果对于任意给定的输入u(已知),在有限观测时间tf>t0,使得根据[t0, tf]期间的输出y(t)能唯一地确定系统在初始时刻的状态x(t0),则称状态x(t0)是能观的,若系统的每一个状态都是能观的,则称系统是状态完全能观的,或简称是能观的。
2.从输出方程y=Cx可以看出,如dimy=m=dimx=n,且C满秩则由y(t)求解x(t)是十分简单的,可用 x(t)=C-1y(t)
3.通常情况是m<n,为了从m维输出分量y(t)唯一地确定n个状态变量,必须在不同时刻多测量几组输出数据,因此观测时间必须满足tf≥t0的要求。
4.在定义中被把能观性定义为对初始状态的确定,是因为一旦确定了初始状态,即可根据系统的输入和状态方程解出任意t>t0时刻系统的瞬时状态。
能观性判别方法:
1.转成约旦标准型判断:
不含有重根:

含有重根:

特殊情况:

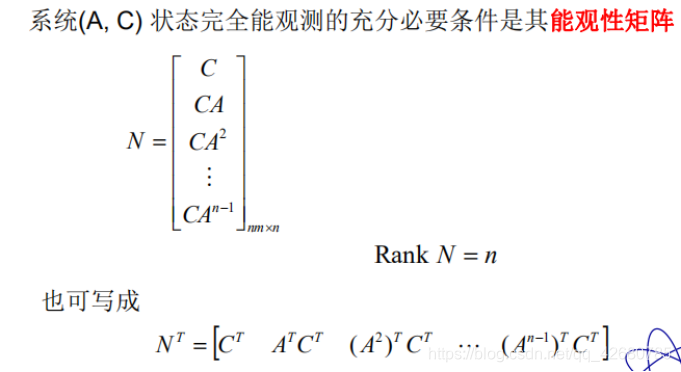
2.使用A,C矩阵判别:
3.4离散时间系统的能控性和能观性
能控性:

能观性:

3.6 对偶关系
对偶系统:

系统S1和S2是互为对偶的两个系统,则S1的能控性等价于S2的能观性,而S1的能观性等价于S2的能控性。换言之,若S1是状态完能控的(完全能观的)则S2就是状态完全能观的(状态完全能控的)。
3.8 线性系统的结构分解
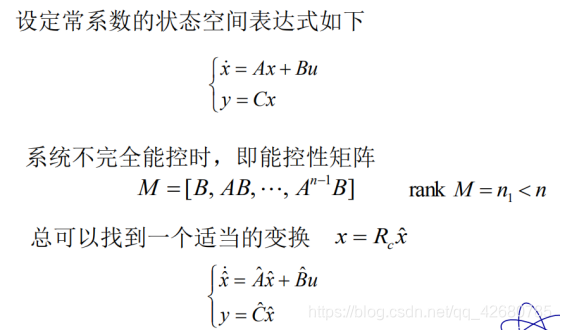
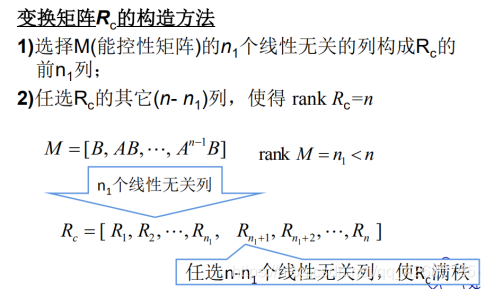
1.按能控性分解:

性质:
(1)n1维子空间是能控的
(2)子系统的传递函数阵与原系统的传递函数阵相等
(c表示control控制)
2.按能观性分解
性质:
(1)n1子系统是能观的
(2)能观子系统的传递函数阵与原系统的传递函数阵相等

3.按能控能观性分解
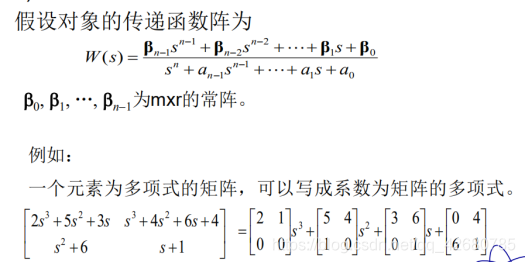
3.9函数阵的实现问题
定义:对于线性定常系统,给定其传递函数阵W(s),若可以找到一状态空间表达式S(A,B,C,D) ,使下式成立C(sI−A)−1B+D = W(s)则称此状态空间表达式S为给定传递函数矩阵W(s)的一个实现。

(1)SISO系统可根据能控能观标准型实现列写。
(2)MIMO系统:


最小实现:


实现步骤:

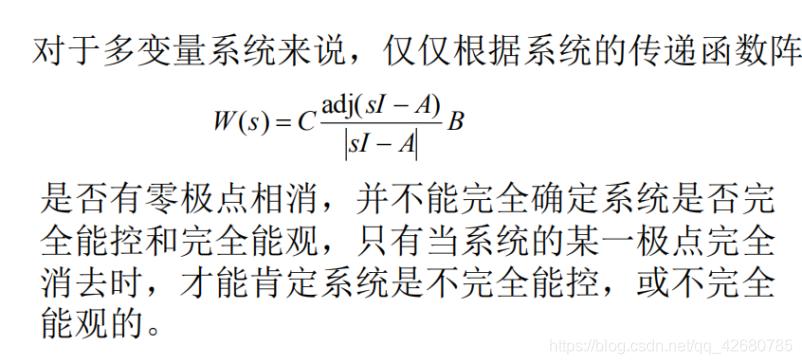
3.10极性对消与能观能控性

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/31994.html