
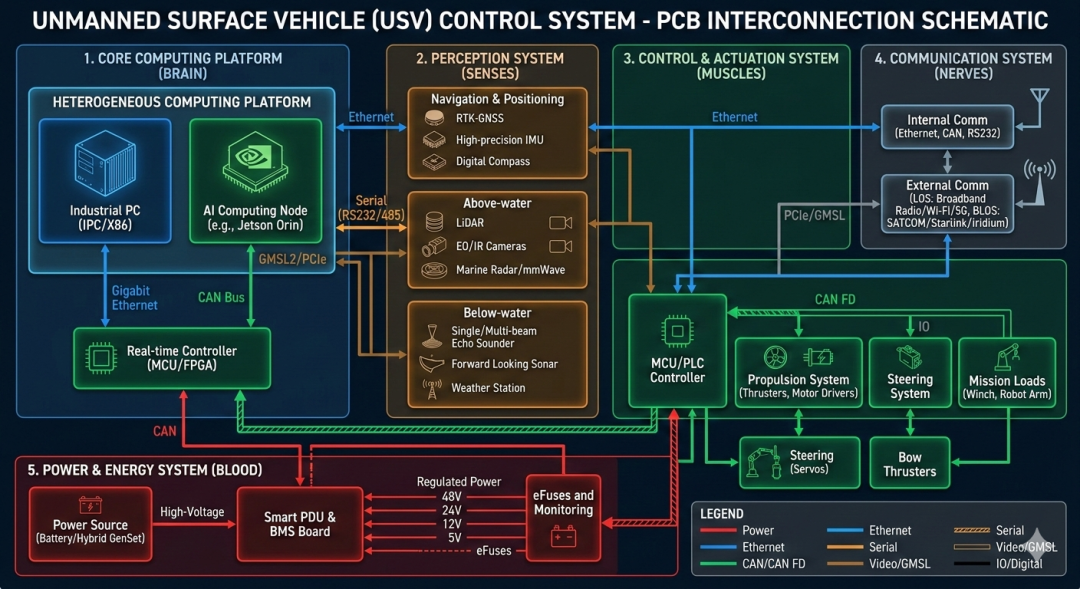
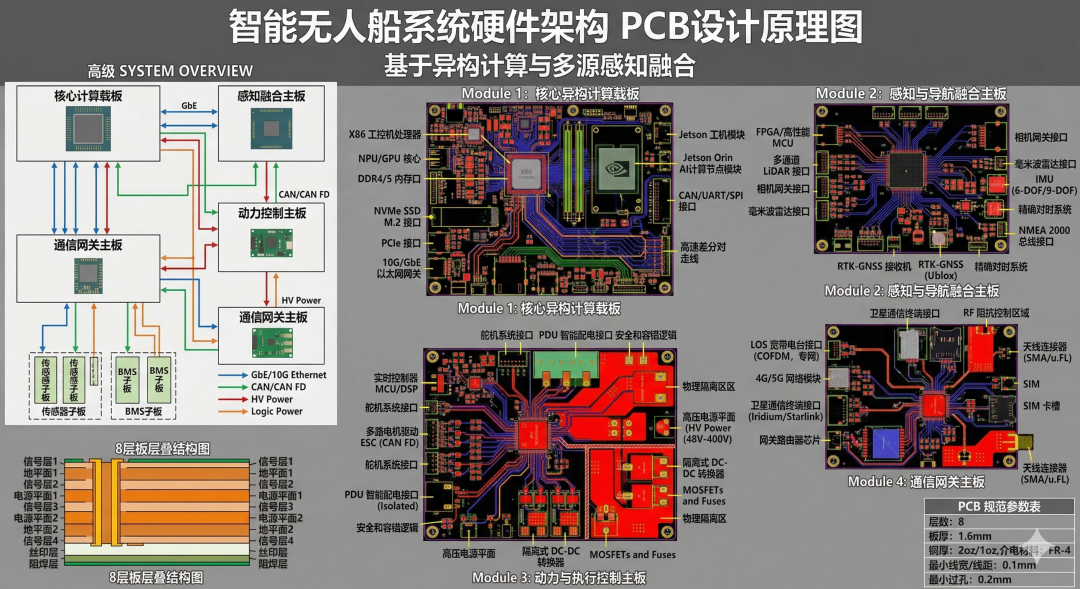
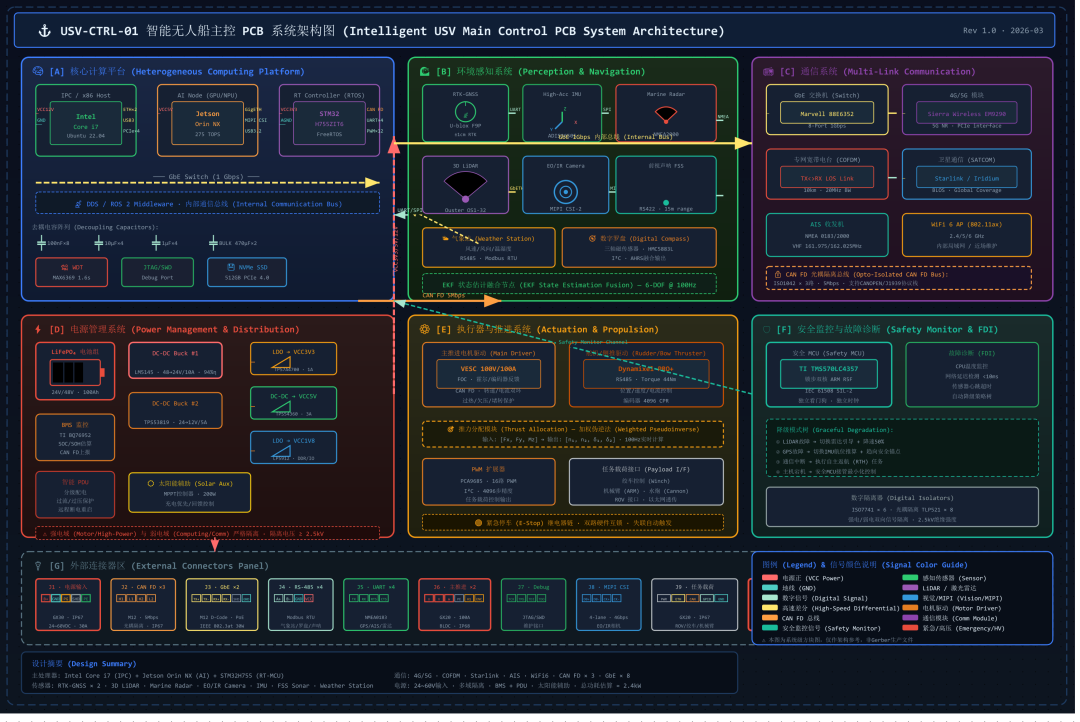
智能无人船系统PCB互连架构原理图(Nano Banana 2生成)
这张图采用分层和模块化设计,清晰展示了您描述中五个子系统之间的物理连接、数据总线和电源通路:
- 核心计算平台 (Brain): 包括IPC (X86)、Jetson Orin (AI) 和底层 MCU/FPGA,通过千兆以太网和CAN/GMSL2/PCIe互连。
- 环境感知系统 (Senses): 细分为定位、水上感知和水下感知模块,标明了Lidar、Radar、Cameras等传感器的特定数据接口(Ethernet, Serial, GMSL2)。
- 控制与执行系统 (Muscles): 实时控制器(RTOS)通过CAN FD总线精确驱动推进、转向、侧推电机及任务载荷(绞车、机械臂)。
- 通信系统 (Nerves): 展示了多链路冗余设计(千兆以太网、CAN、RS232、5G、SATCOM/Starlink)。
- 电源与配电系统 (Blood): 动力(电池/混动)通过 Smart PDU (智能配电) 与 BMS (电池管理) 严格隔离为强电和弱电,提供分级配电、eFuses 和智能监控。
此外,图例(Legend)详细解释了不同颜色线条代表的信号类型(电源、以太网、CAN FD、串口、视频/GMSL2 等),为设计具体PCB提供了拓扑参考。
由Nano Banana 2生成
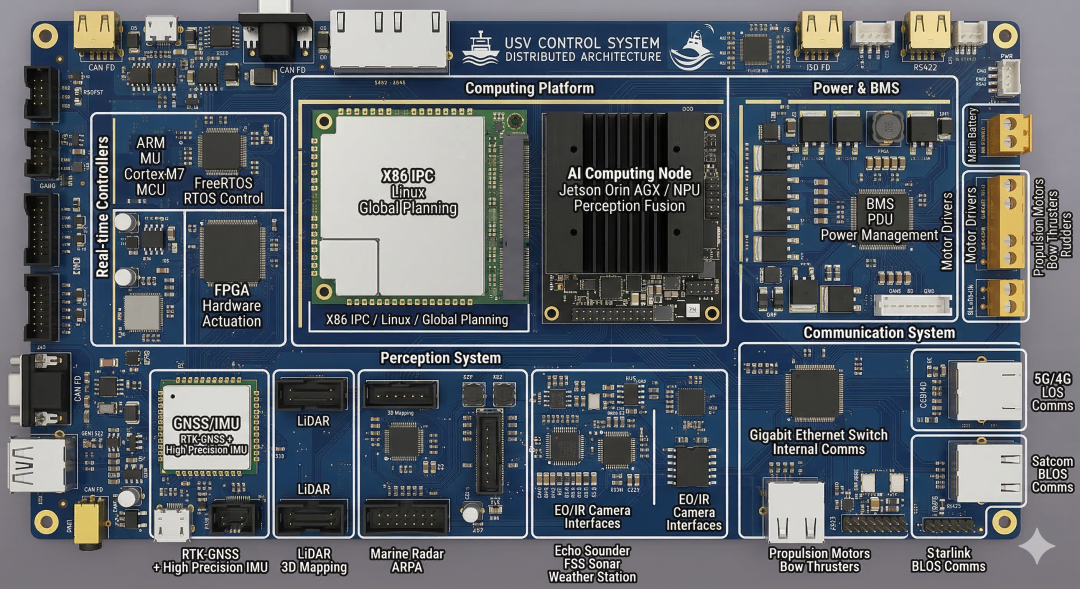
这是一张基于您所描述的智能无人船系统硬件架构生成的PCB电路布局图。
我根据系统描述中的五大子系统对电路板进行了模块化分区,具体包括:
- 核心计算平台 (Brain):位于板卡中心,包含了运行Linux的X86工控机模块、用于感知融合的Jetson Orin AI计算节点,以及负责底层实时控制的ARM MCU和FPGA。
- 环境感知系统 (Perception):集成了GNSS/IMU定位模块,并预留了LiDAR(激光雷达)、航海雷达、声呐及相机(EO/IR)等传感器的专用接口。
- 电源与配电系统 (Power & BMS):包含了智能配电单元(PDU)和电池管理系统(BMS),以及用于驱动推进器和舵机的电机驱动电路。
- 通信系统 (Communication):配备了千兆以太网交换机用于内部数据交换,并集成了4G/5G视距通信和卫星超视距通信模块。
- 控制与执行接口:提供了丰富的外部接口,用于连接电机、舵机和任务载荷。
该图展示了一个高度集成、功能完备的无人船主控板卡的概念设计。希望这张图片能直观地体现出您所描述的复杂系统的硬件构成。如果您需要对某个具体细节进行深入探讨或修改,请随时告诉我。
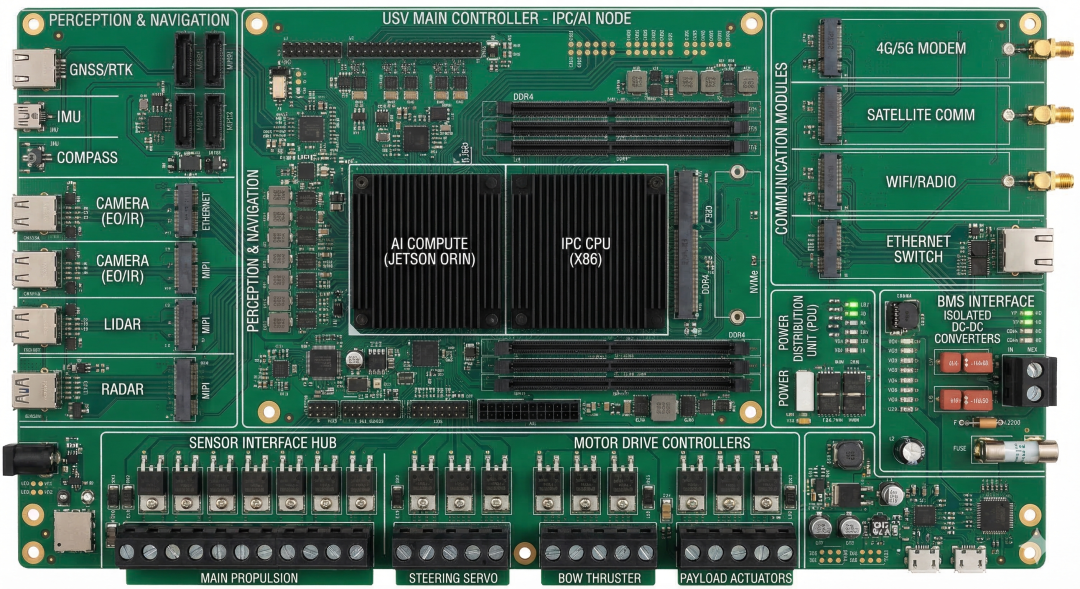
由Nano Banana Pro 生成
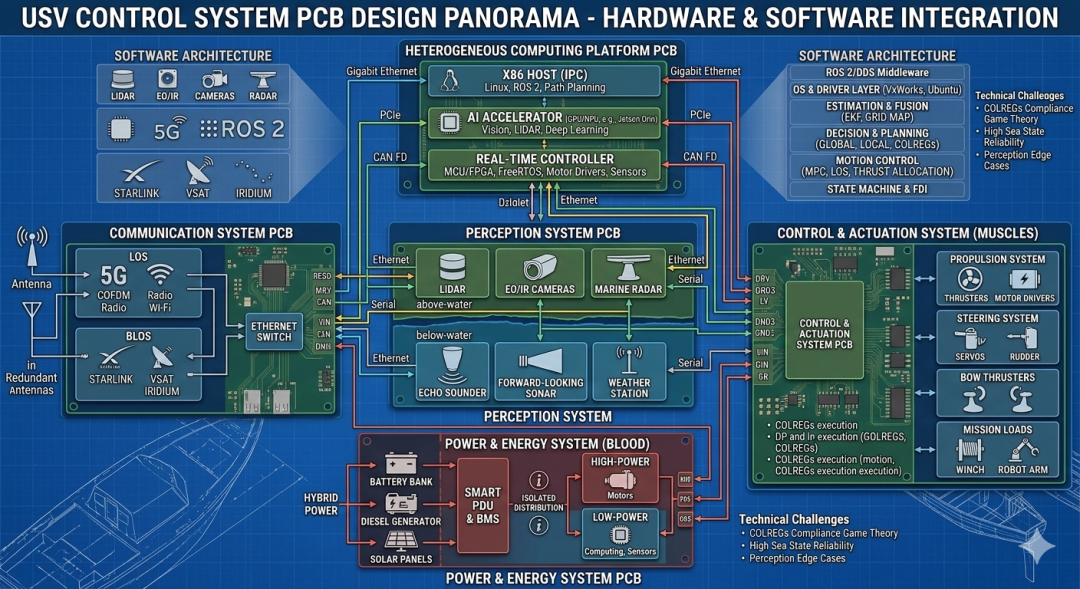
由claude自定义SKILL生成


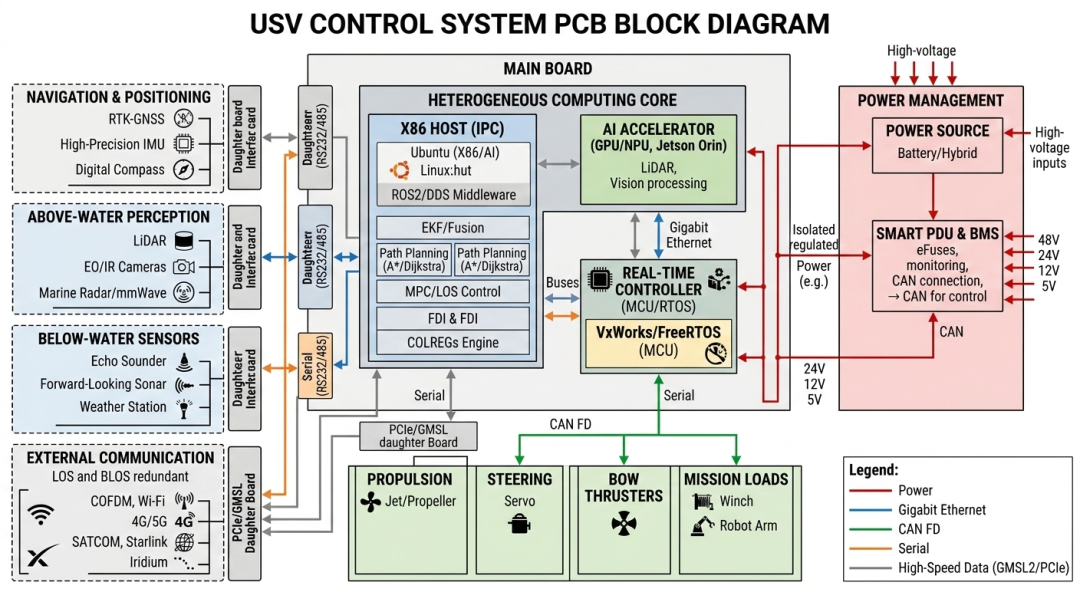
由Claude自带SKILL生成
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/246448.html