
现代控制理论
建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分。在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法。现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。它所采用的方法和算法也更适合于在数字计算机上进行。现代控制理论还为设计和构造具有指定的性能指标的最优控制系统提供了可能性。

讯享网

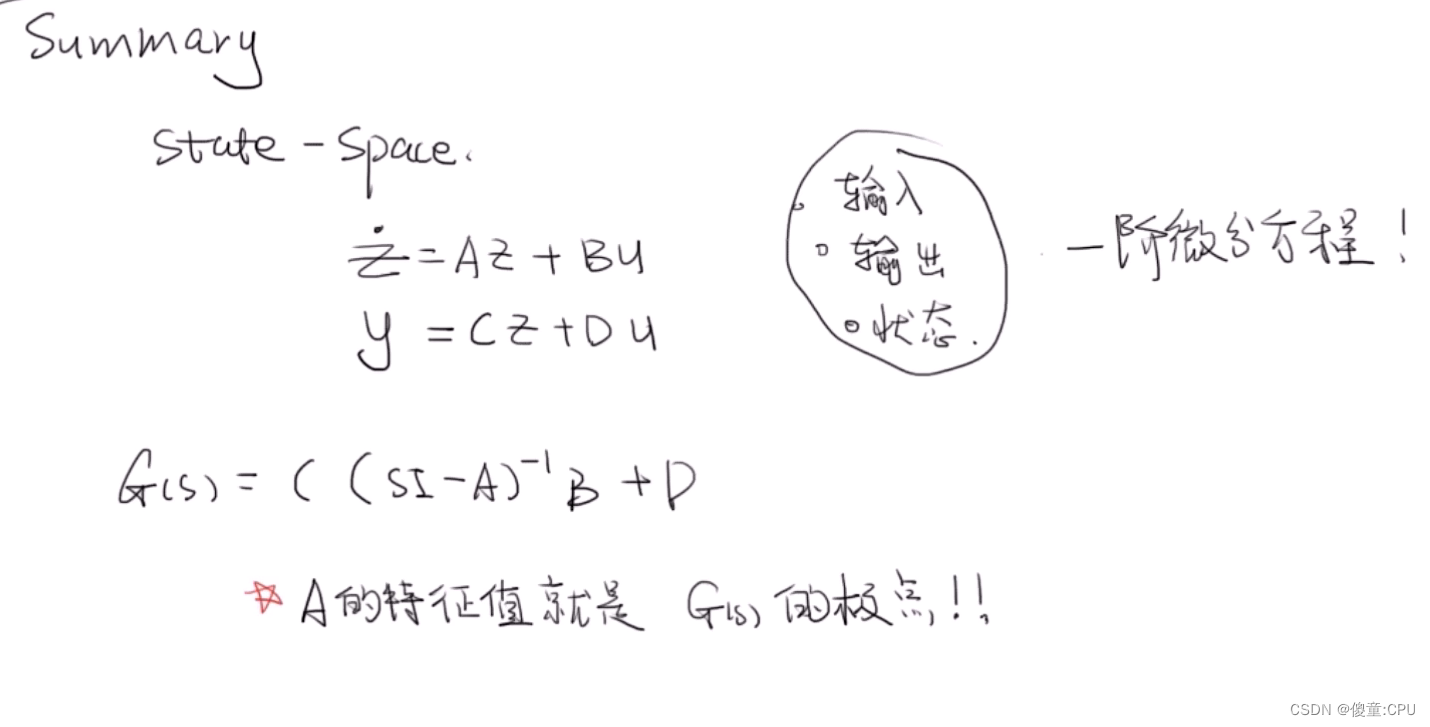
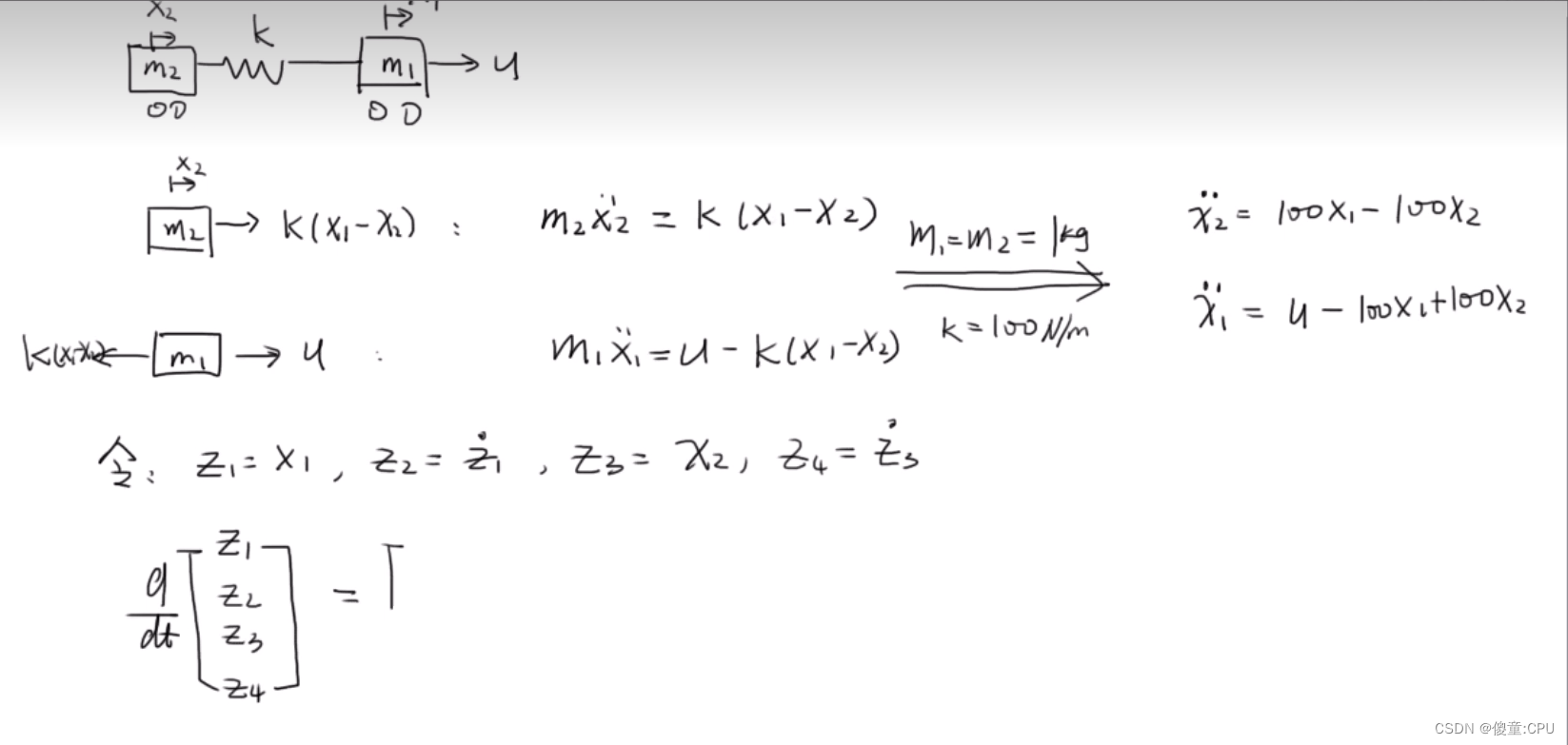
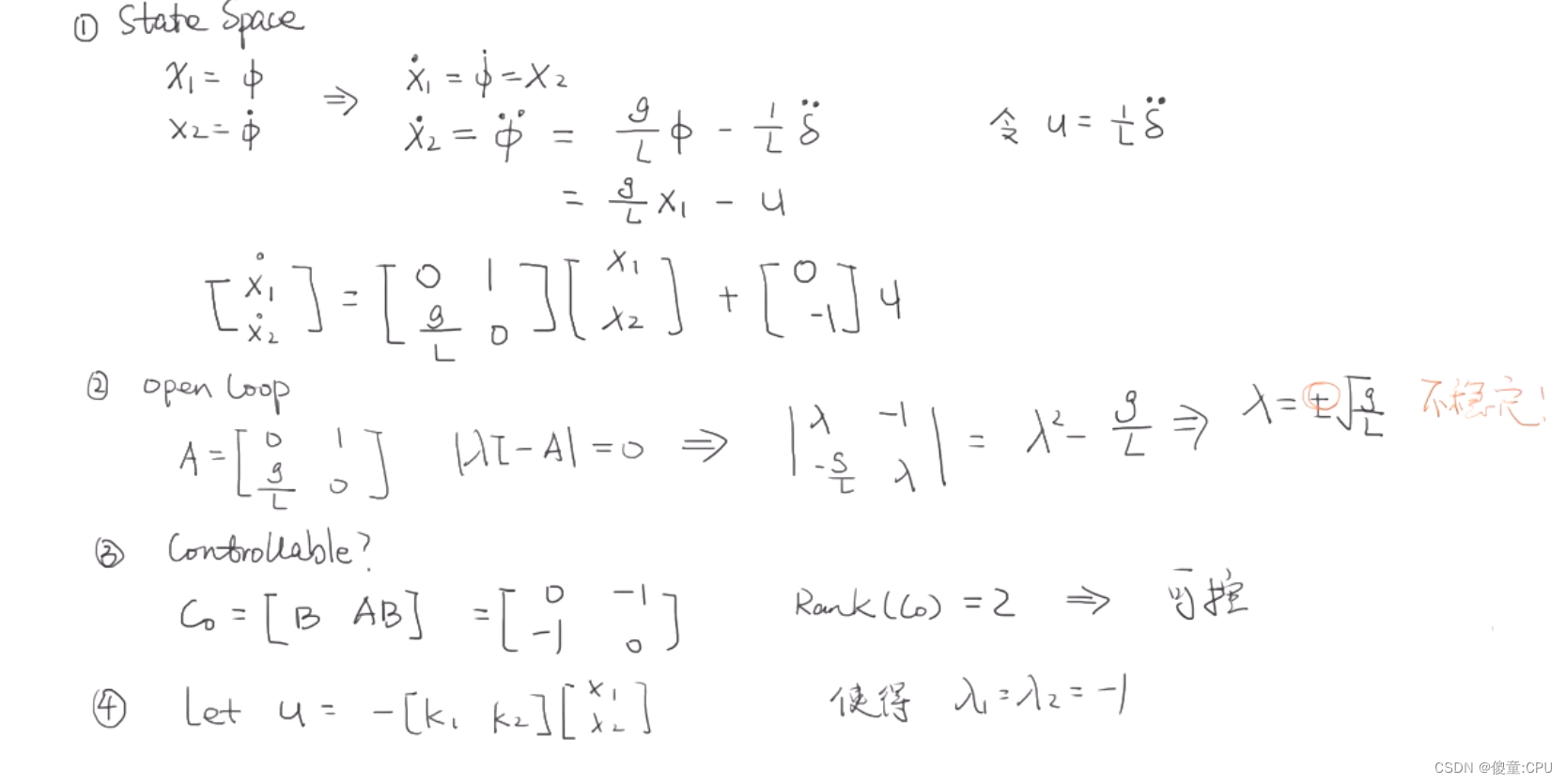
状态空间

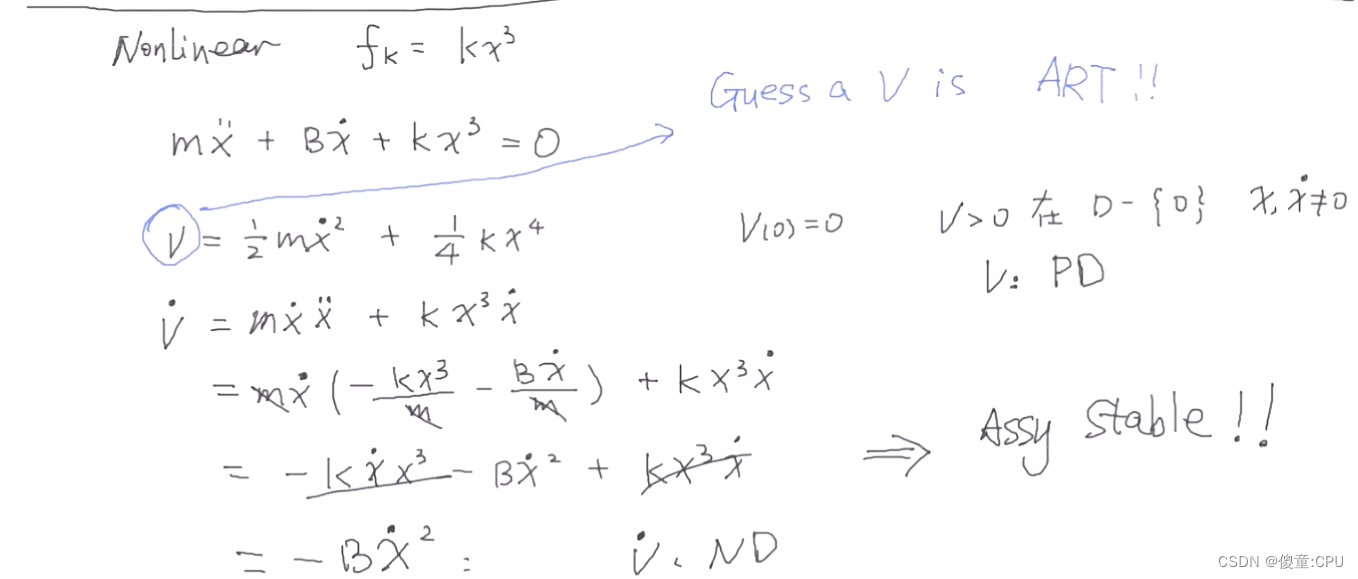
弹簧力(fK):弹簧力值简单地说就是弹簧的弹力计算。弹簧力值是指:发生弹性形变的弹簧,会对跟它接触的物体产生力的作用。这种力叫弹簧弹力。弹簧力值就是对弹簧弹力的计算。
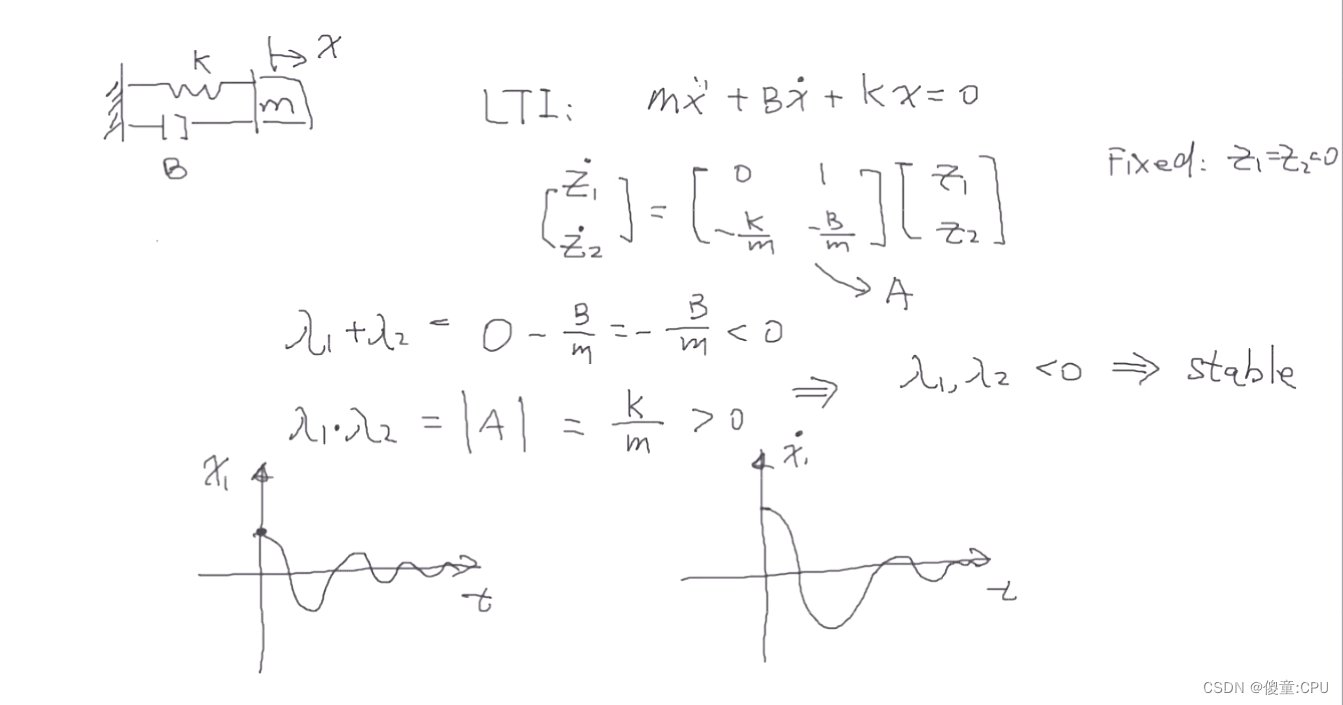
阻尼力(fB):在物理学和工程学上,阻尼的力学模型一般是一个与振动速度大小成正比,与振动速度方向相反的力,该模型称为粘性(或粘性)阻尼模型,这个力即为阻尼力。

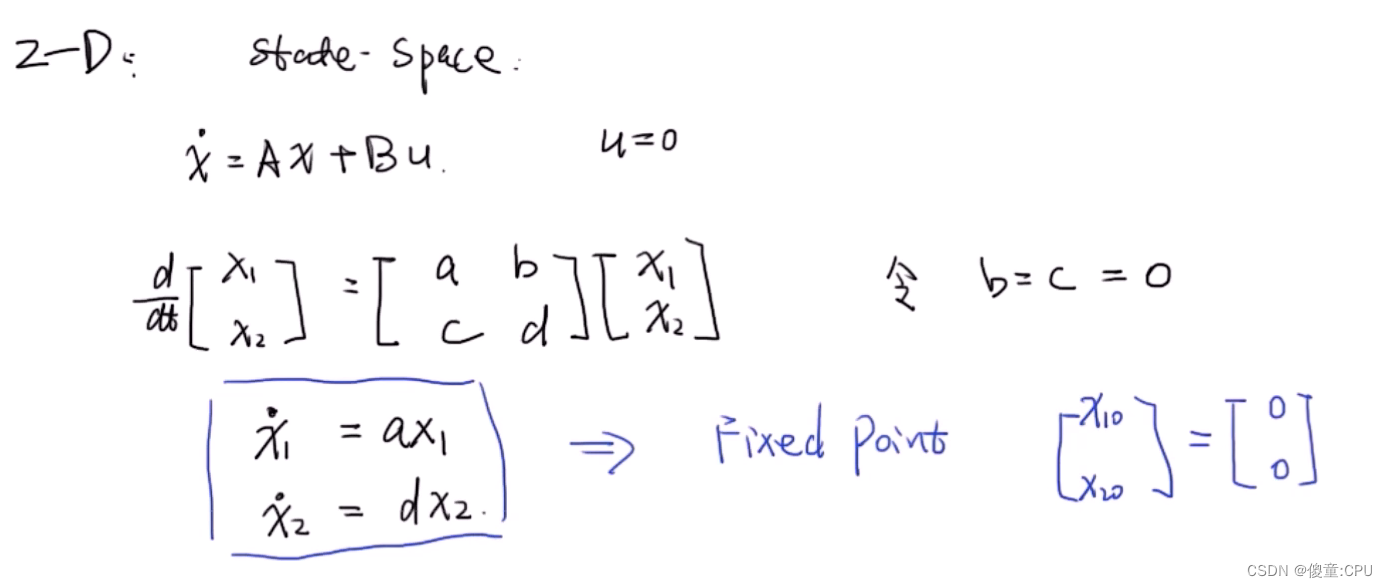
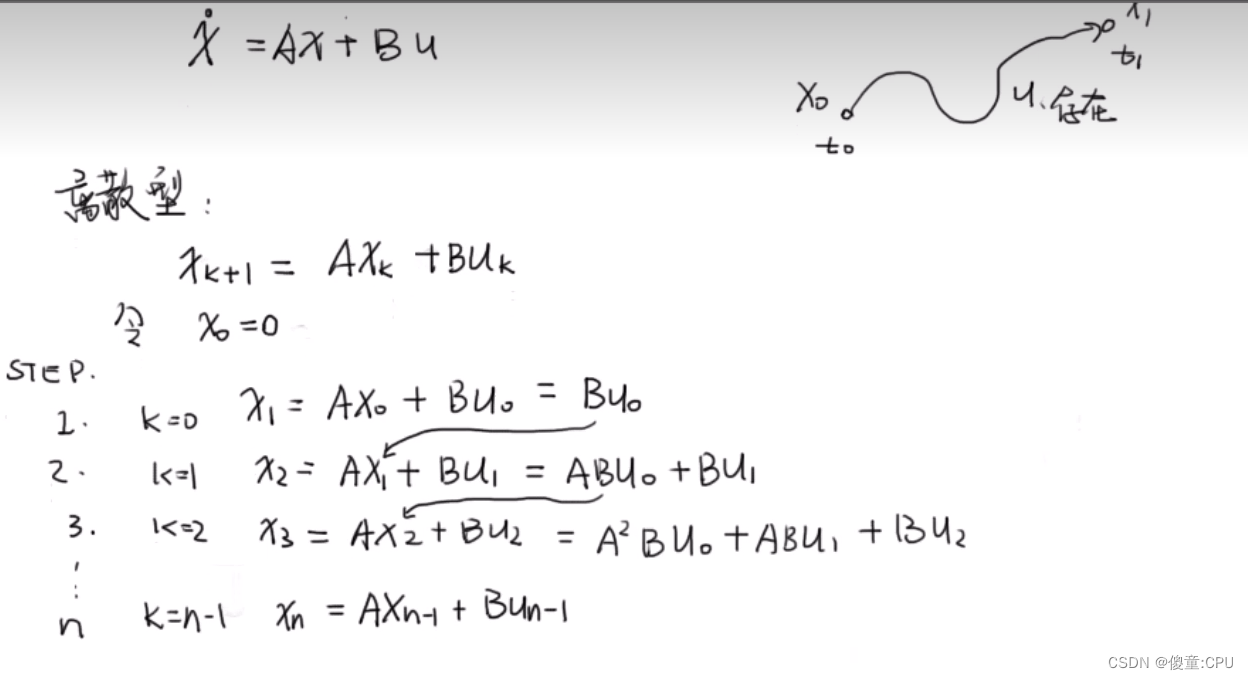
状态方程是指刻画系统输入和状态关系的表达式。状态向量所满足的向量常微分方程称为控制系统的状态方程。状态方程是控制系统数学模型的重要组成部分。
以传递函数为基础的经典控制理论的数学模型适应当时手工计算的局限,着眼于系统的外部联系,重点为单输入-单输出的线性定常系统。伴随计算机的发展,以状态空间理论为基础的现代控制理论的数学模型采用状态空间方程,以时域分析为主,着眼于系统的状态及其内部联系,研究的机电控制系统扩展为多输入-多输出的时变系统。所谓状态变量是足以完全表征系统运动状态的最小个数的一组变量,而状态方程则是由系统状态变量构成的一阶微分方程组。







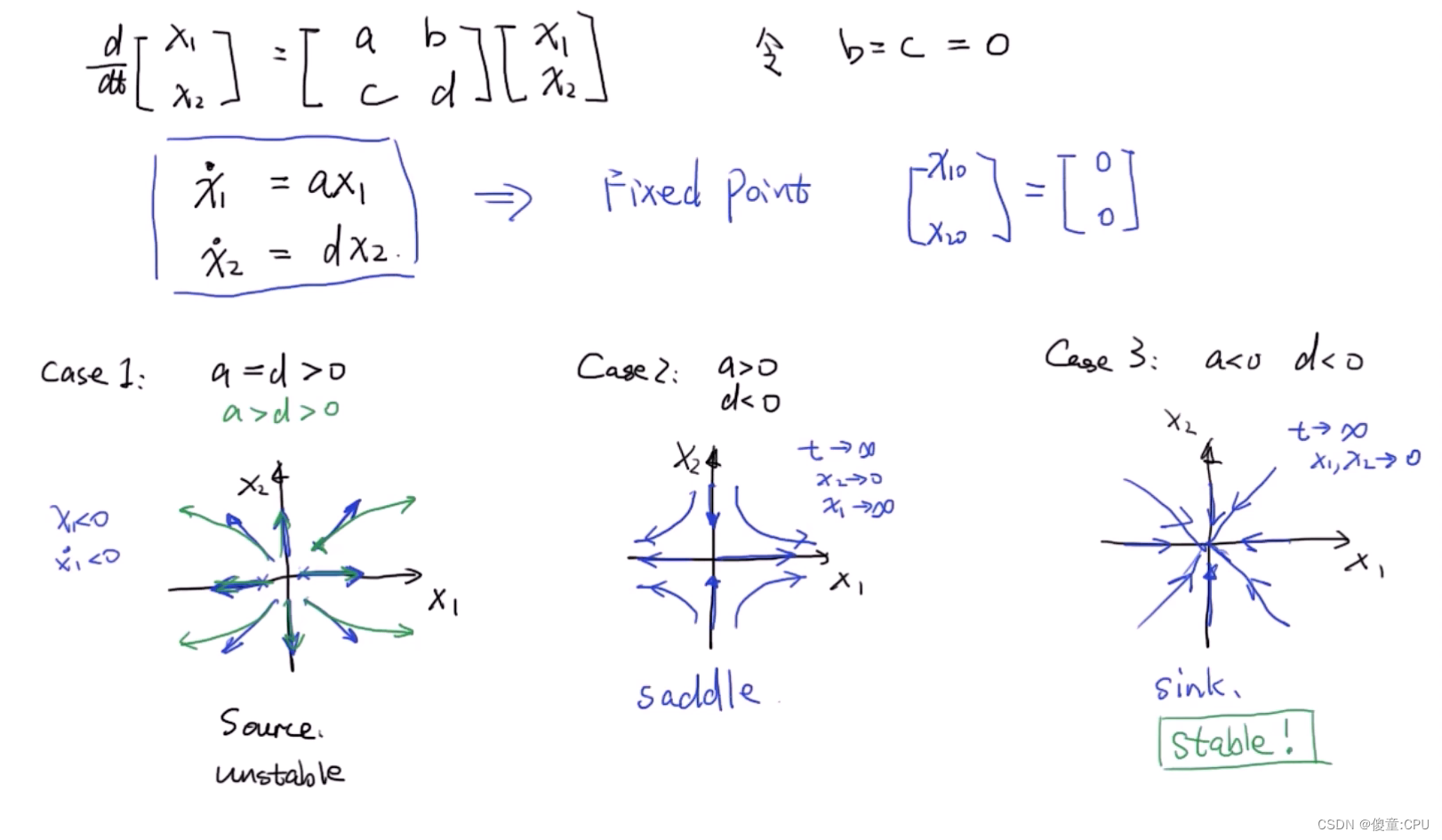
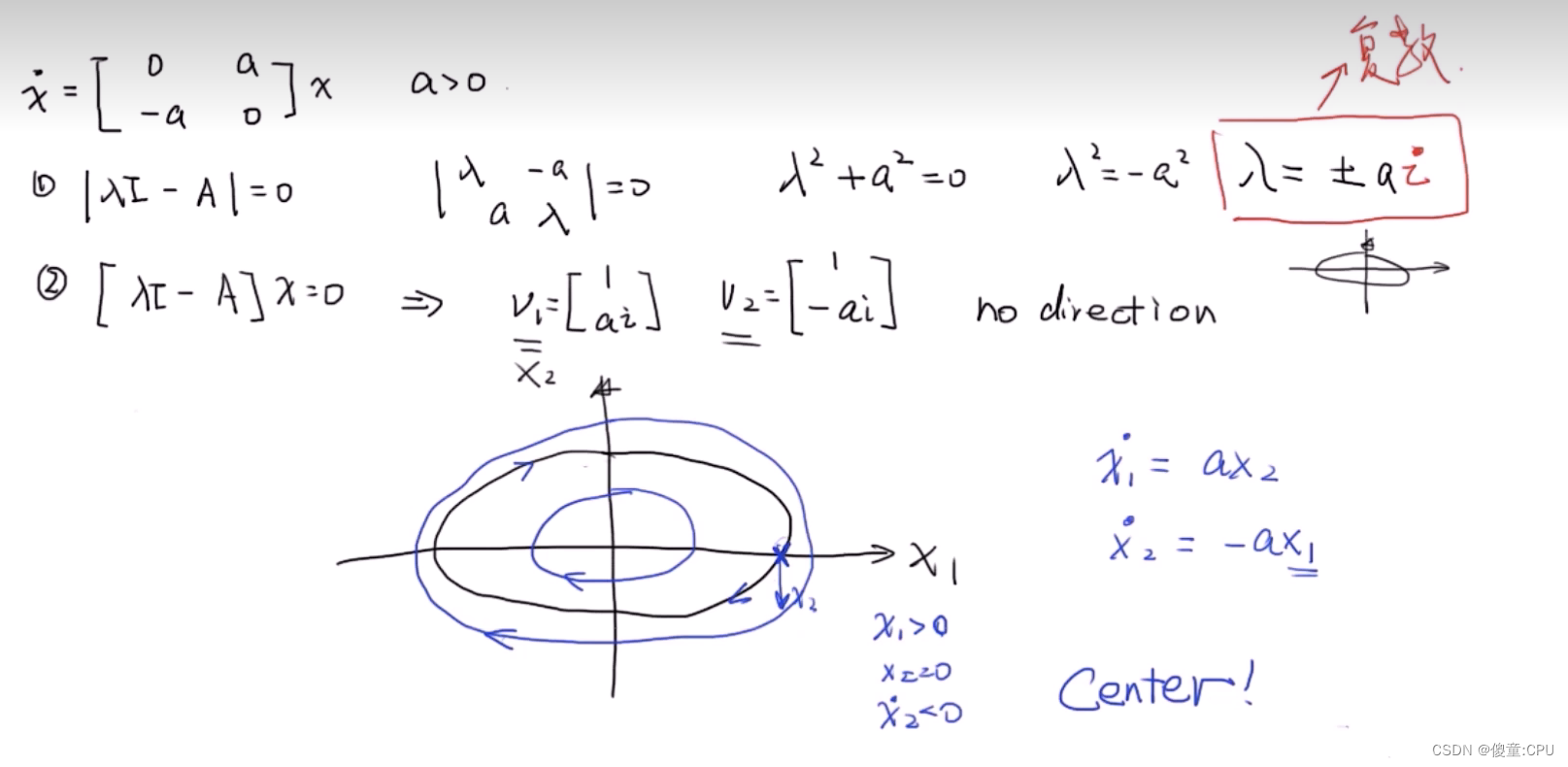
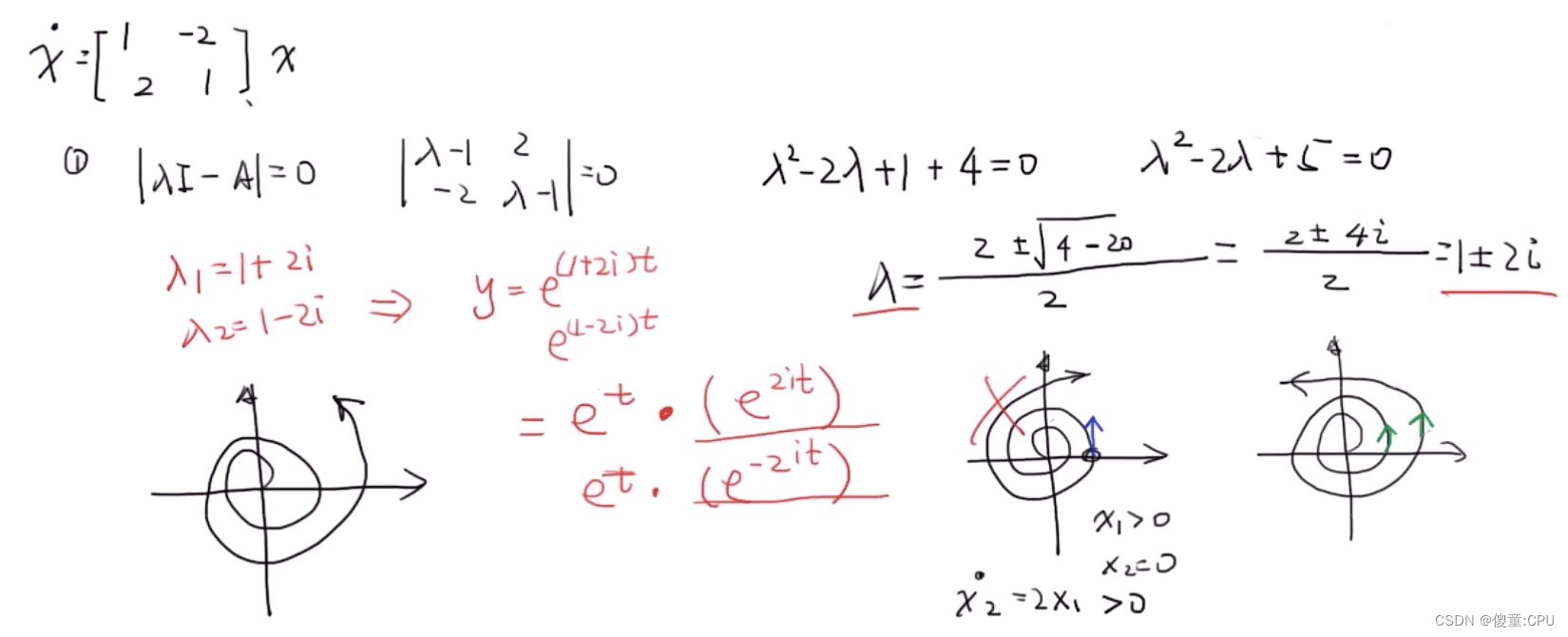
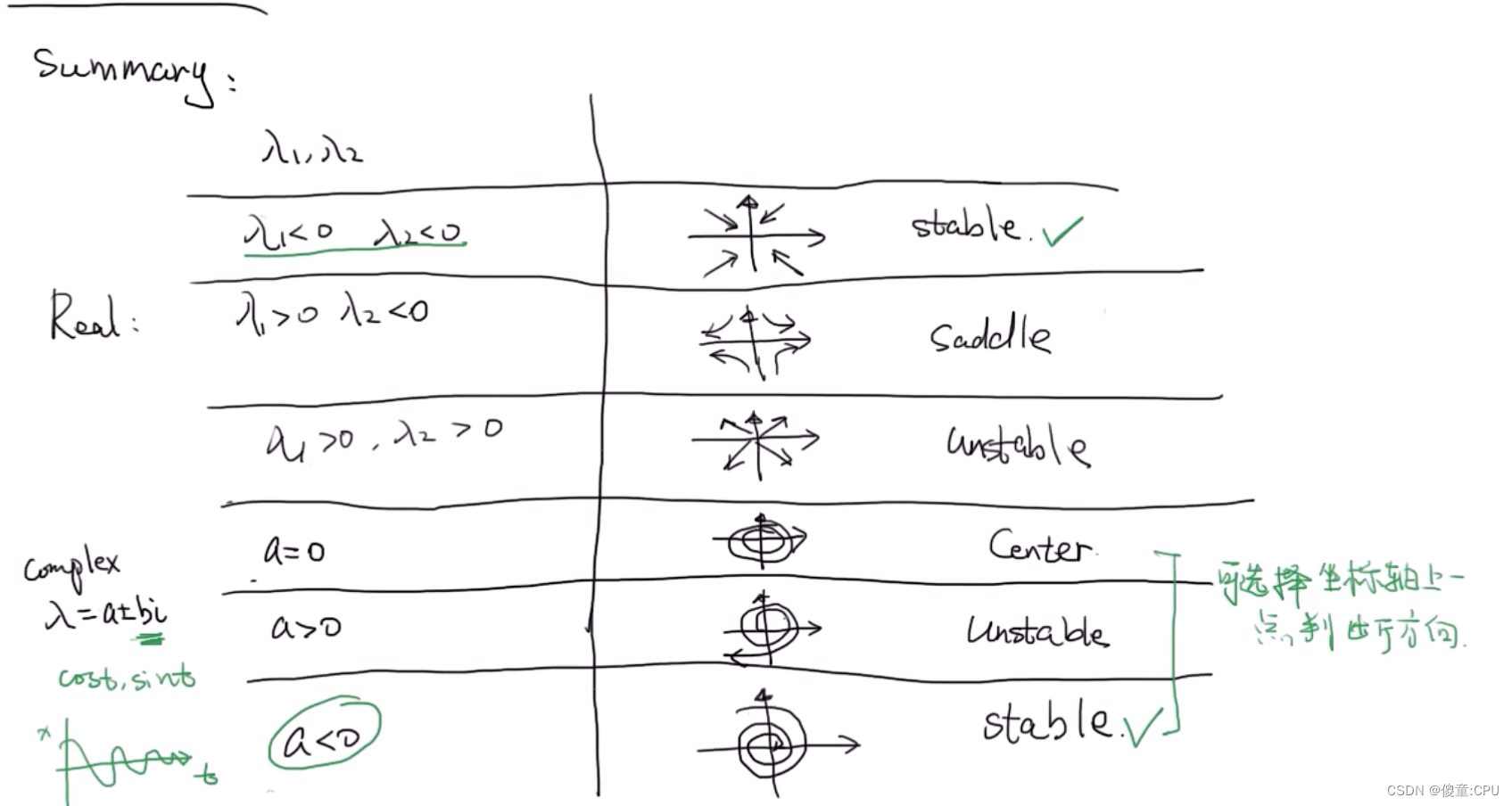
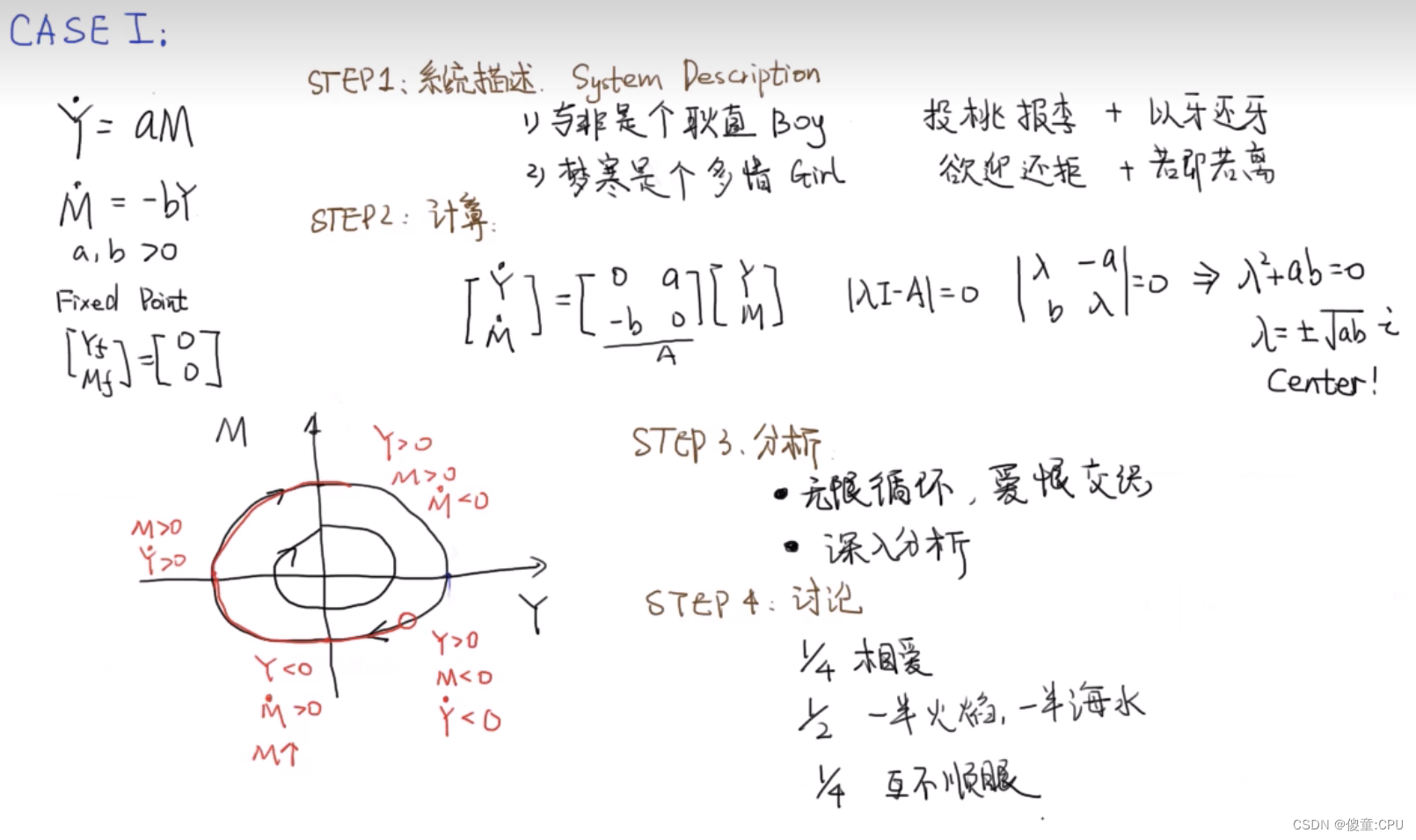
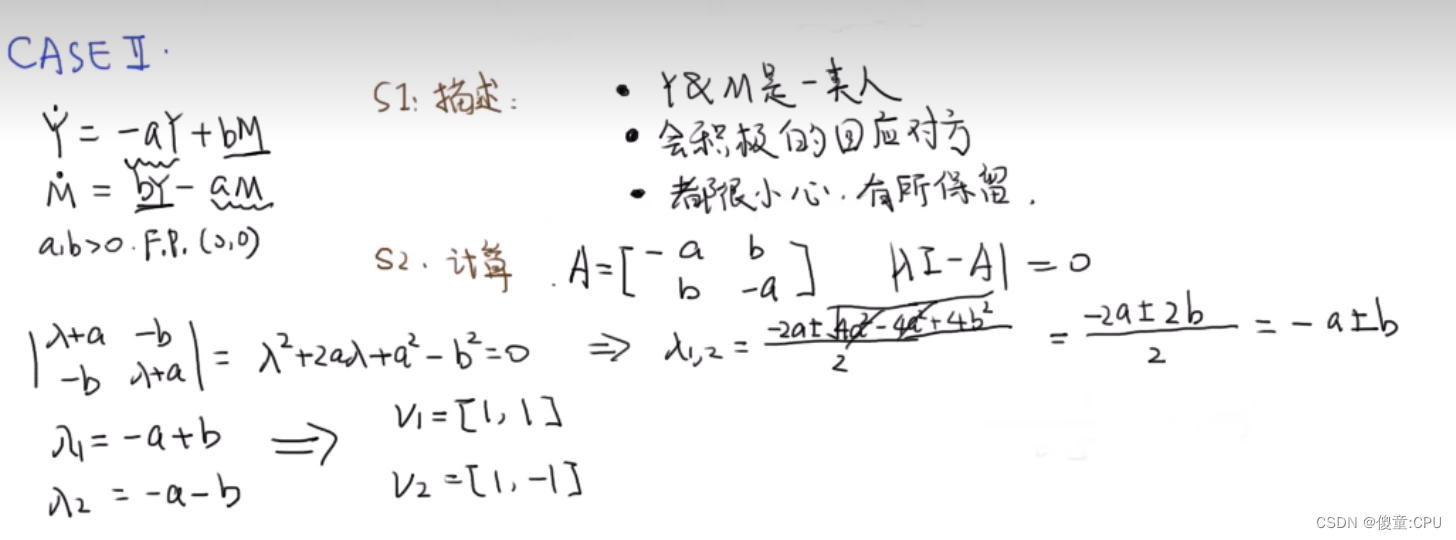
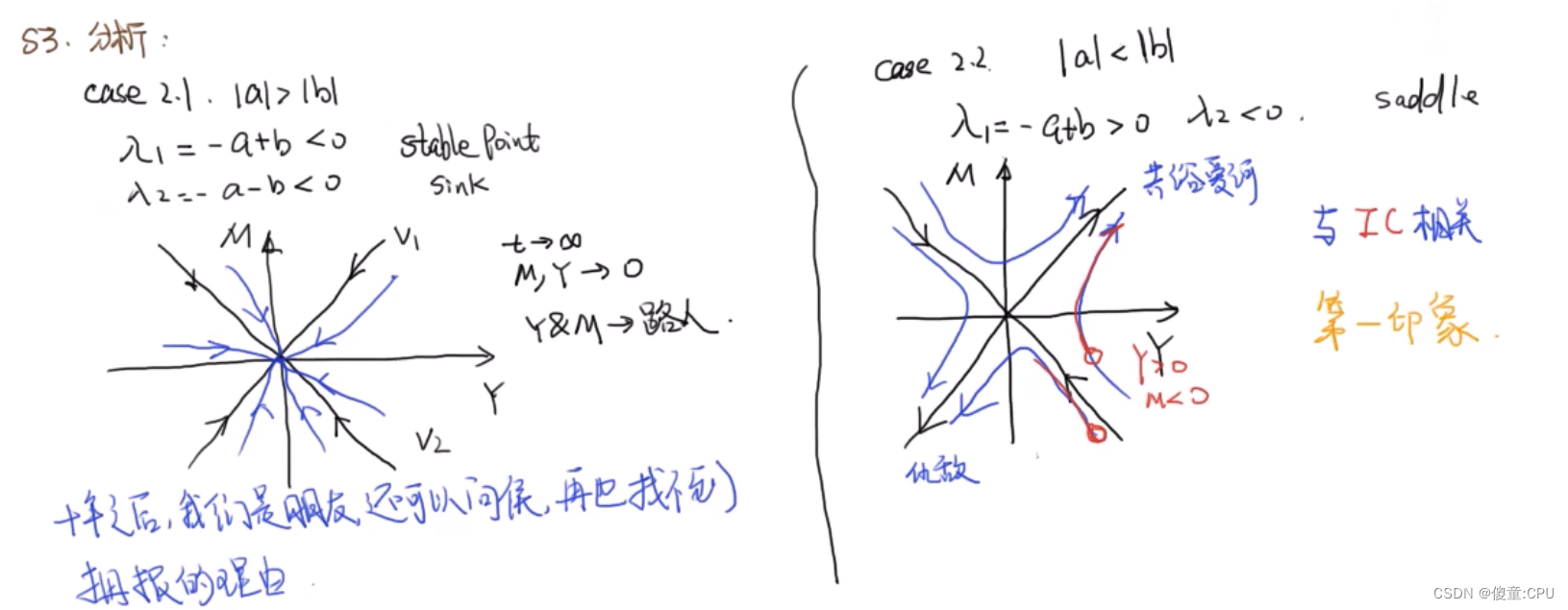
相图、相轨迹
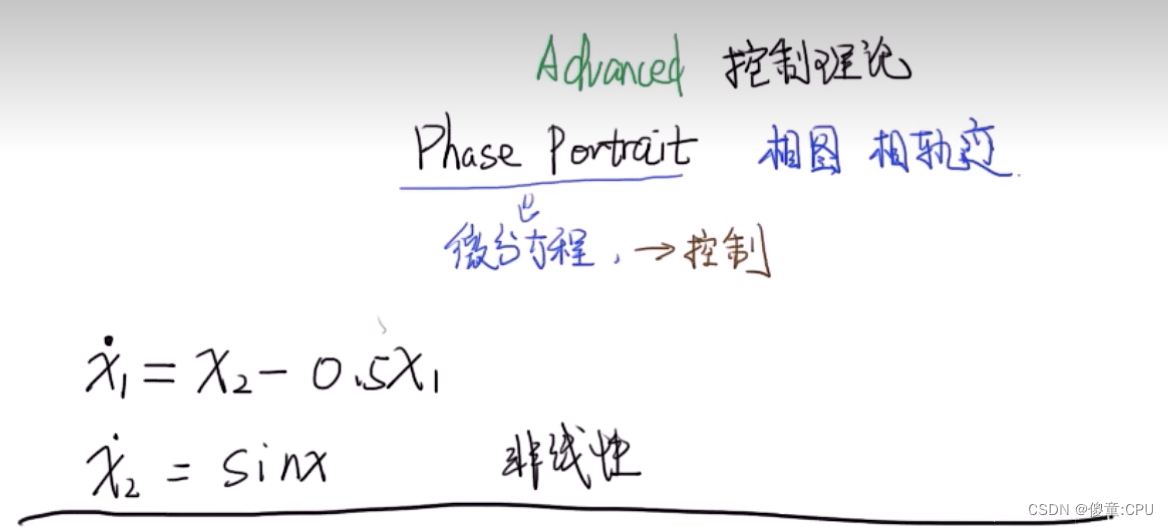
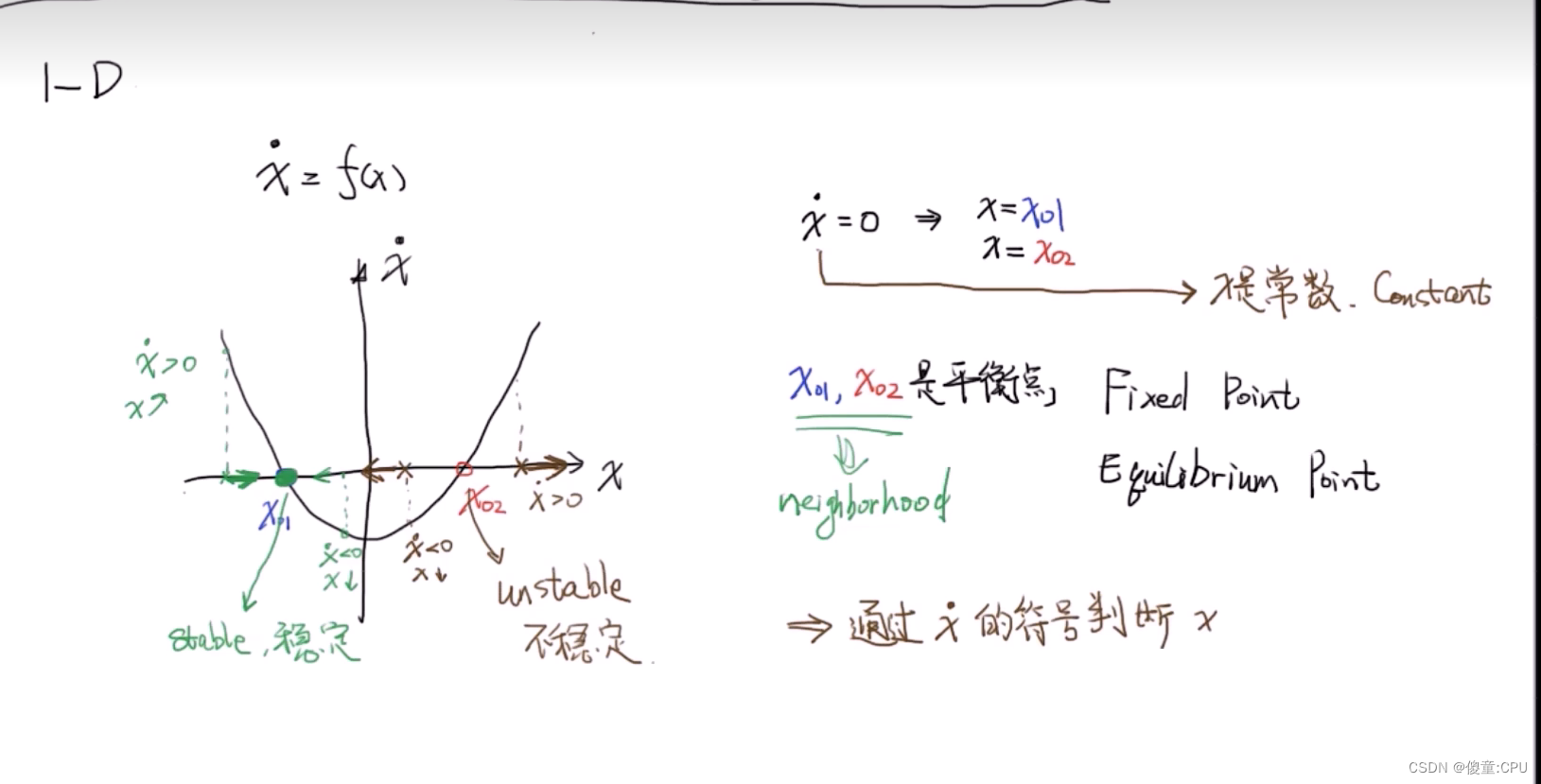
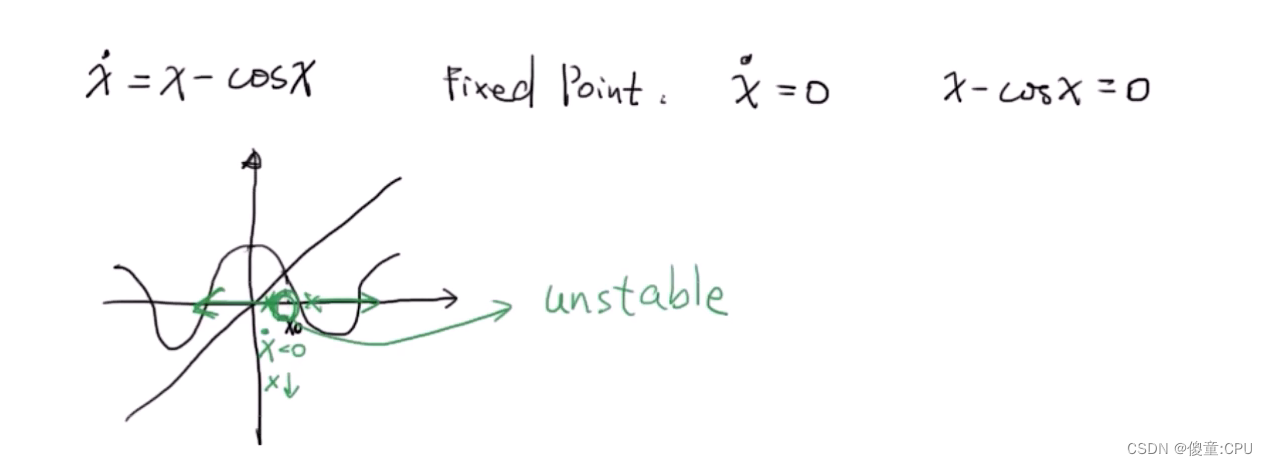
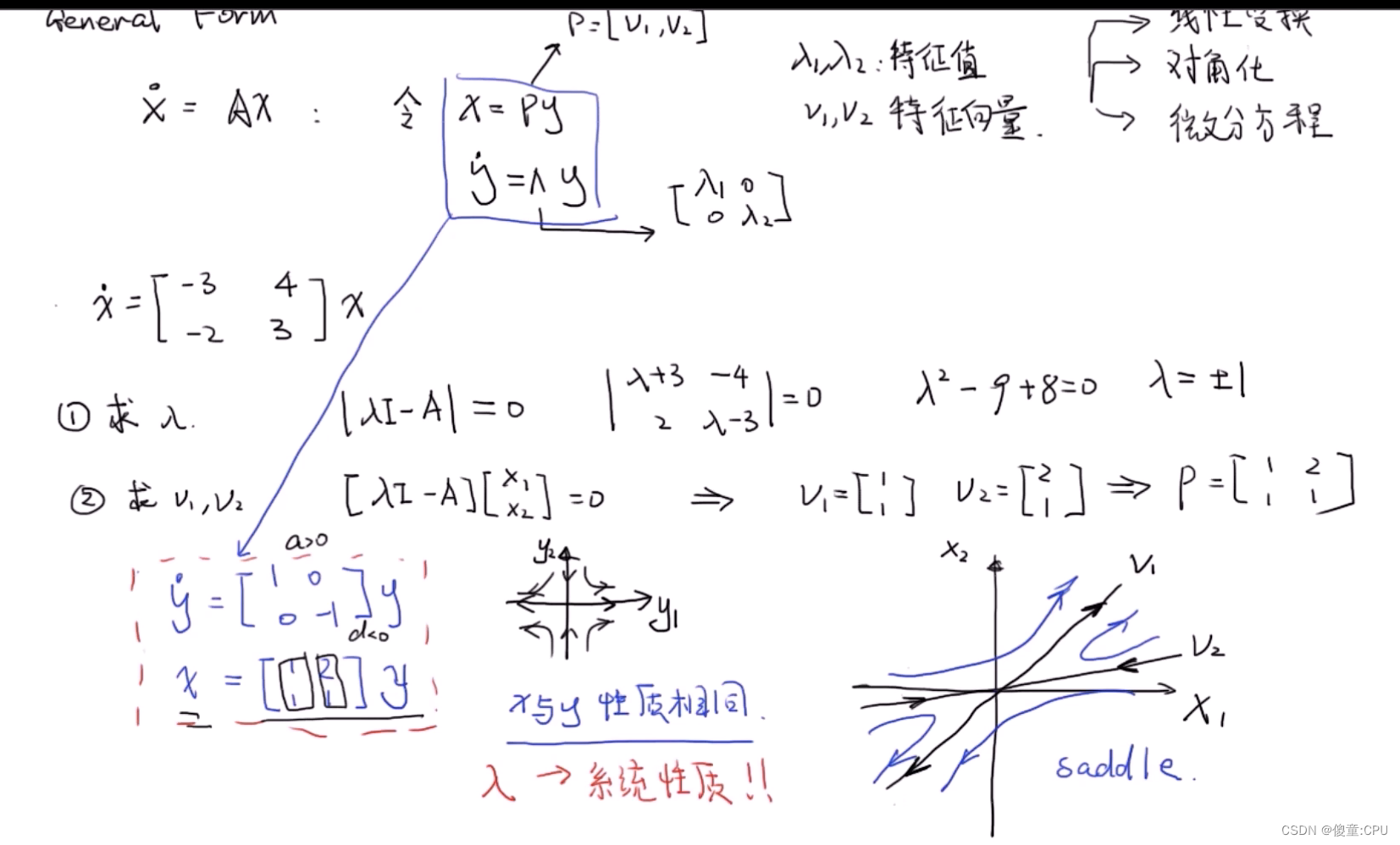
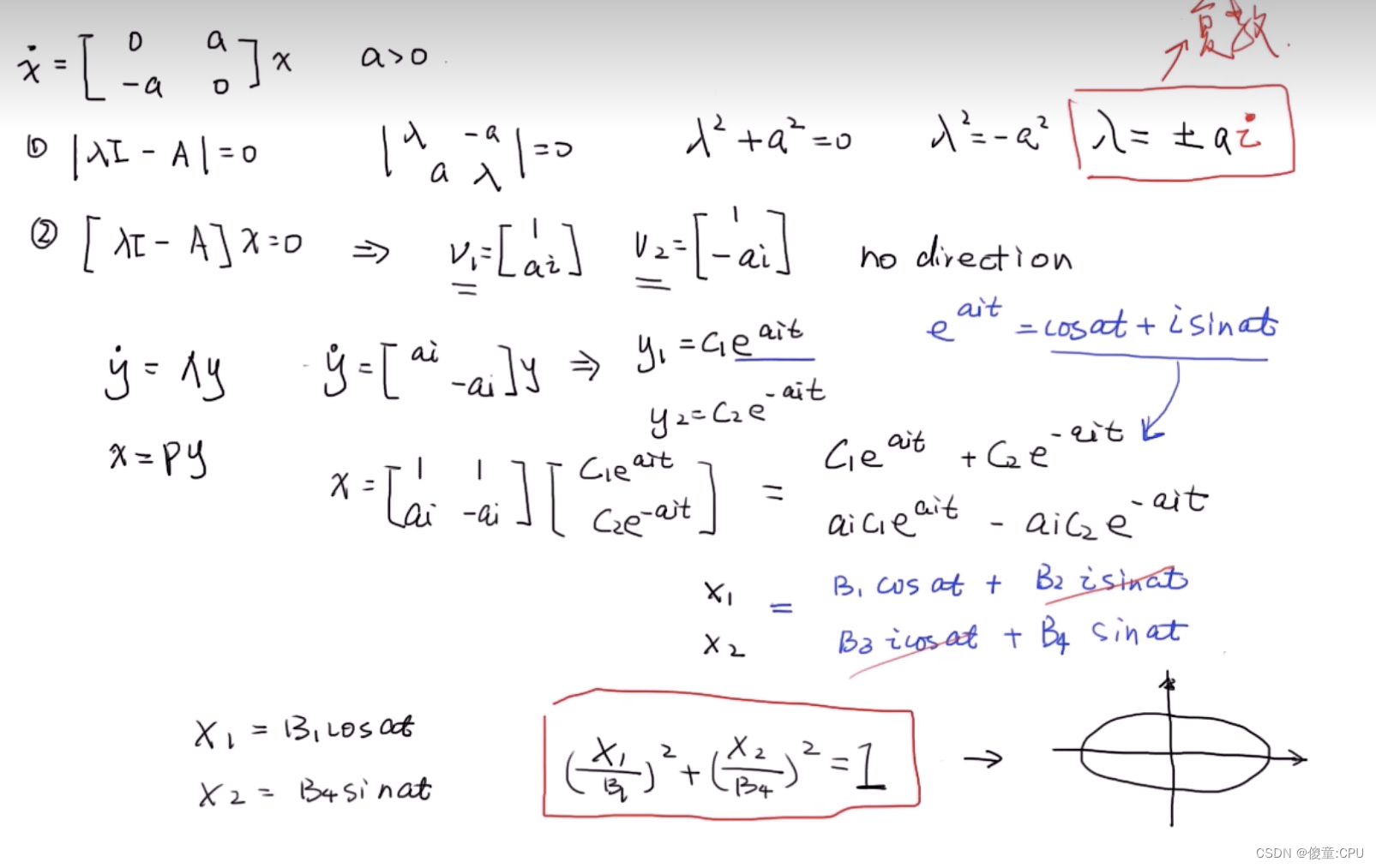
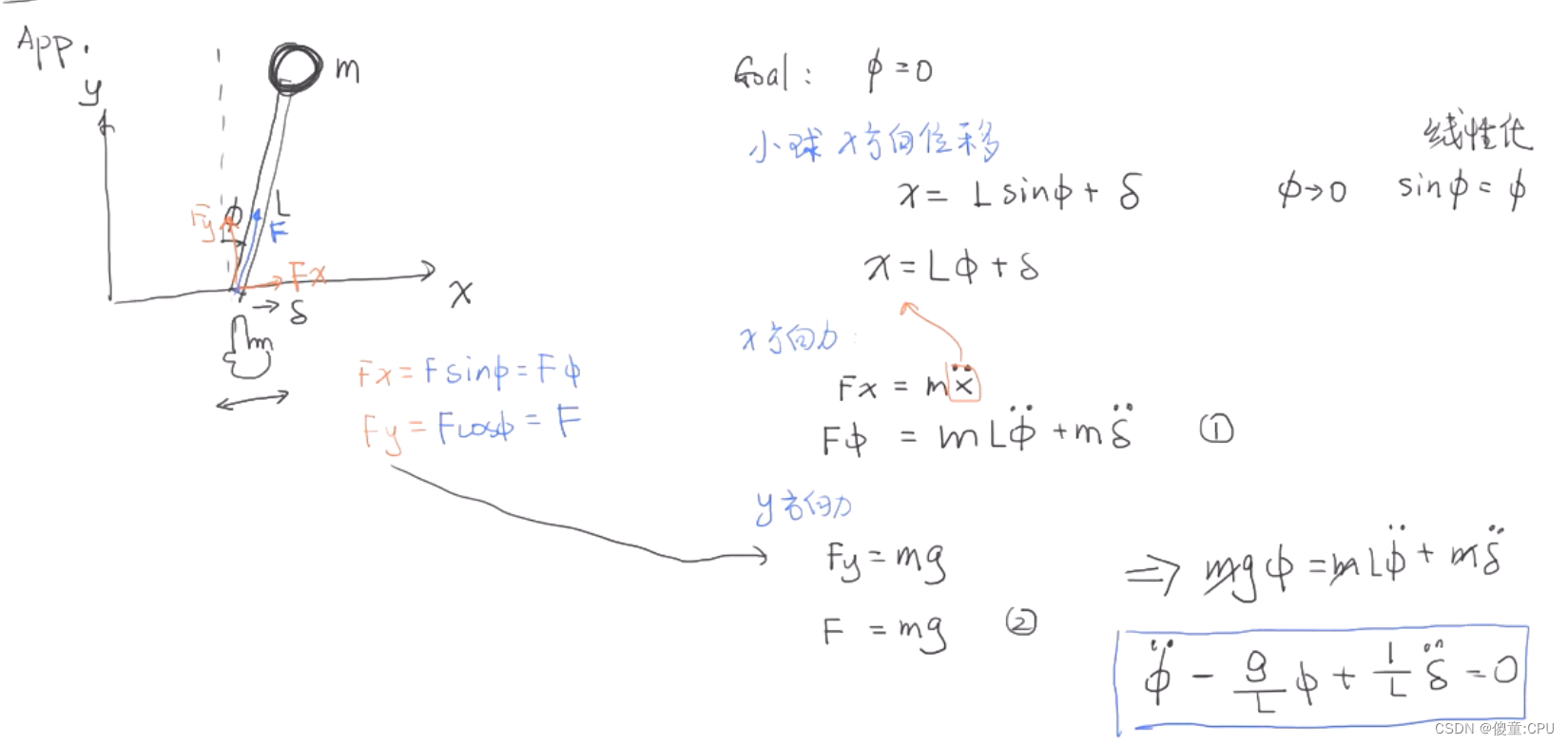
例子

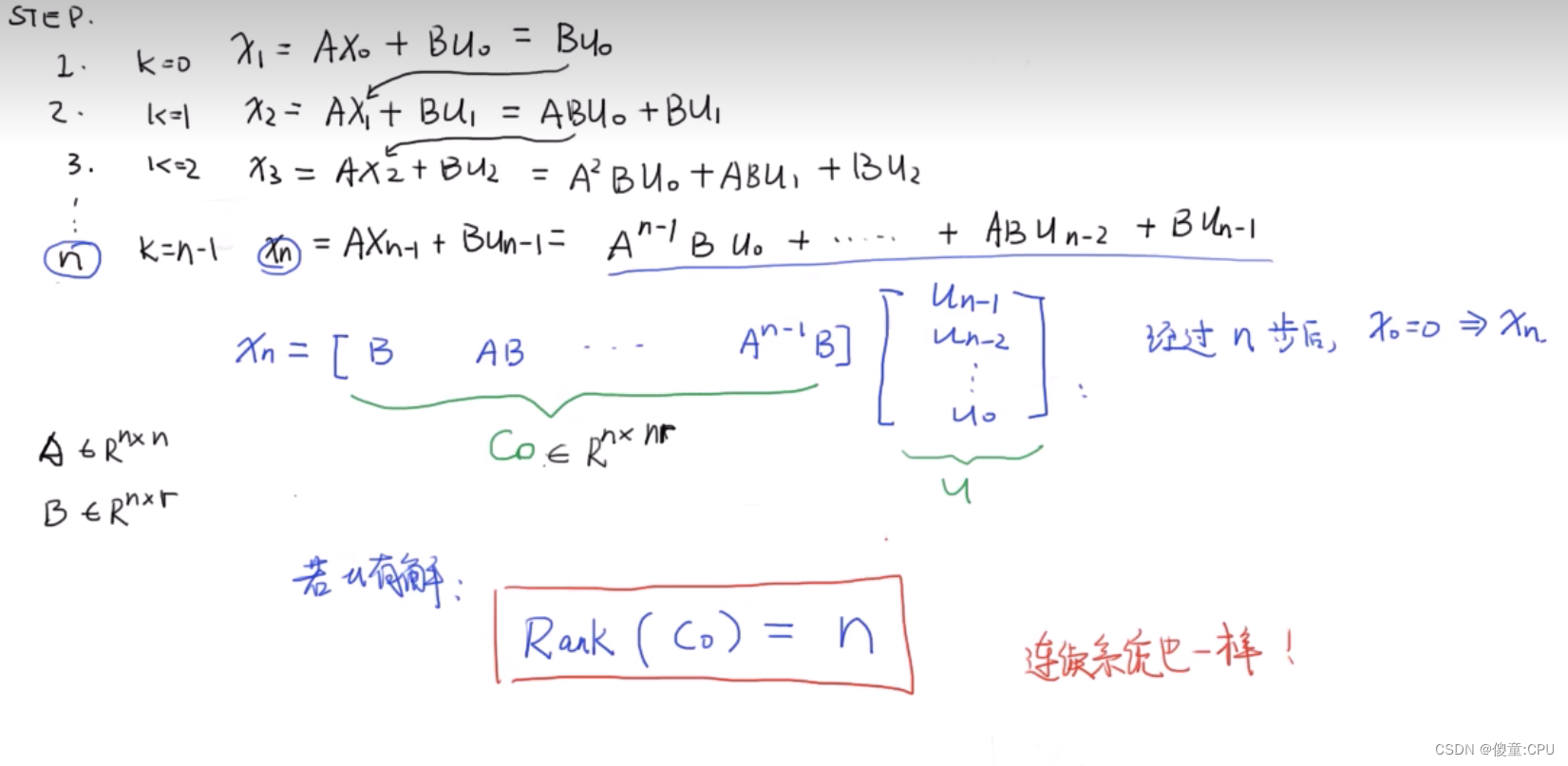
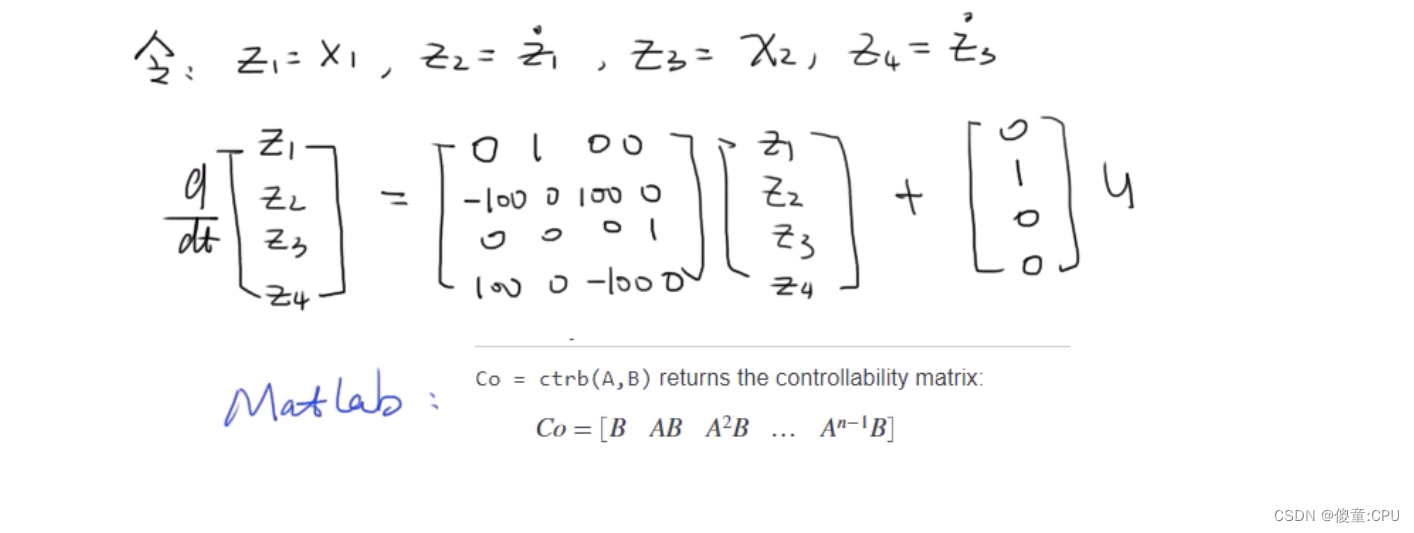
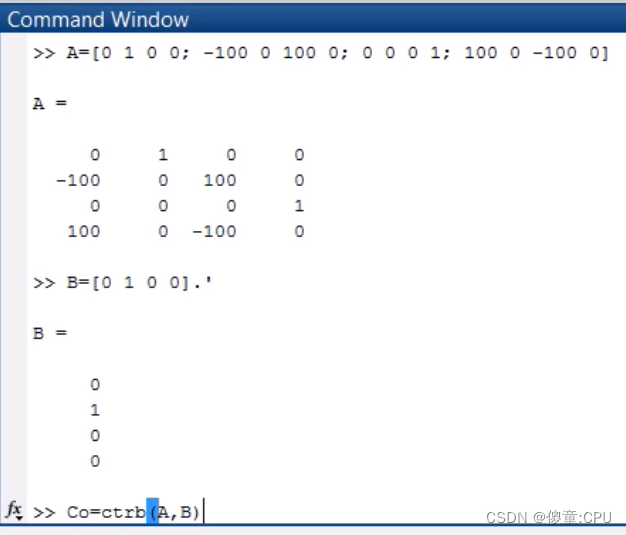
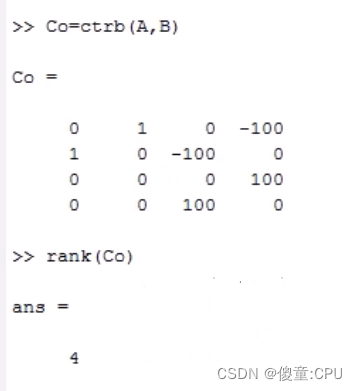
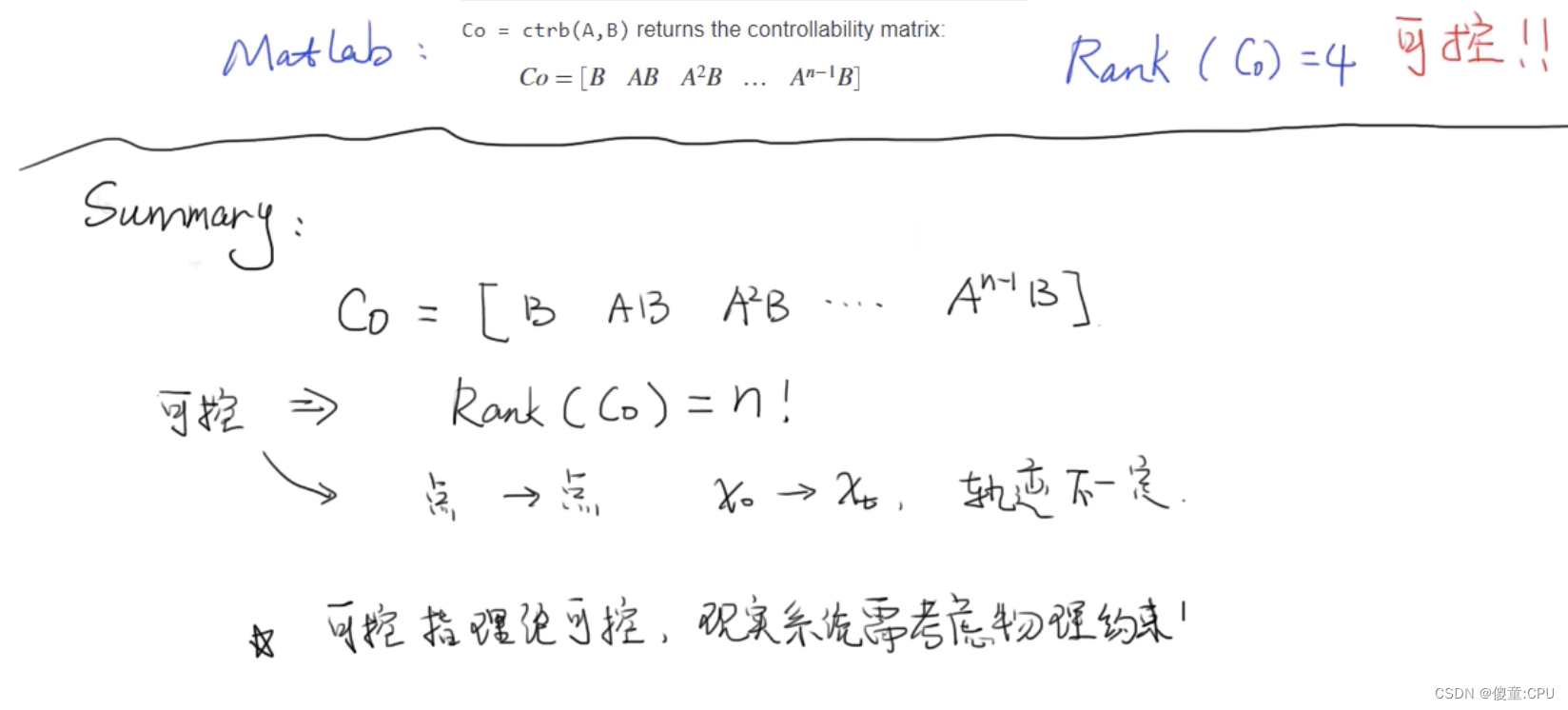
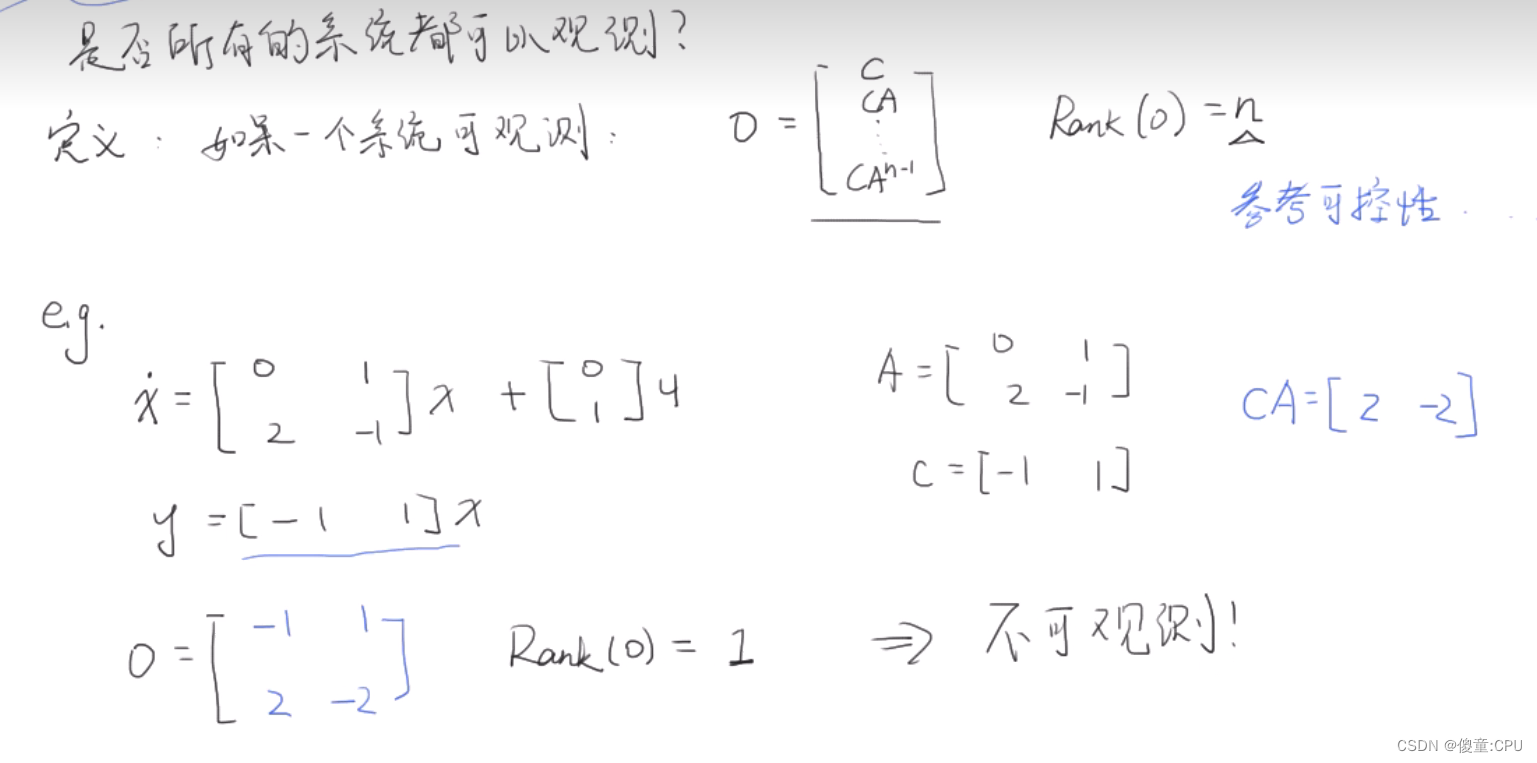
可控性

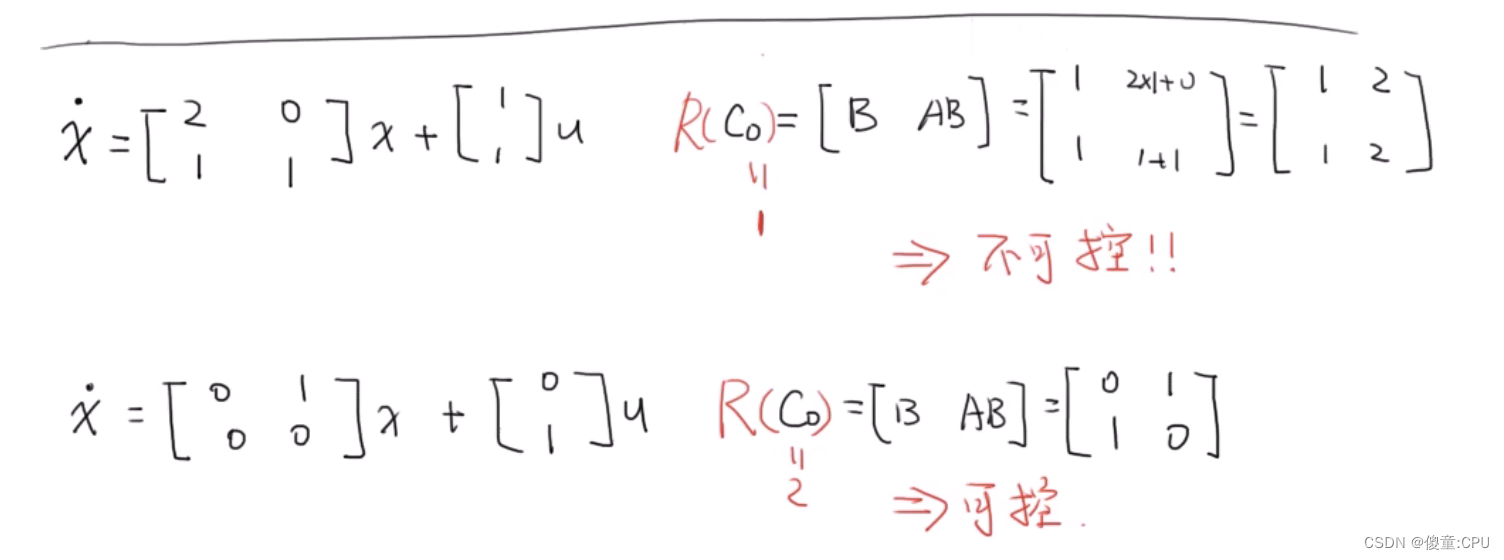
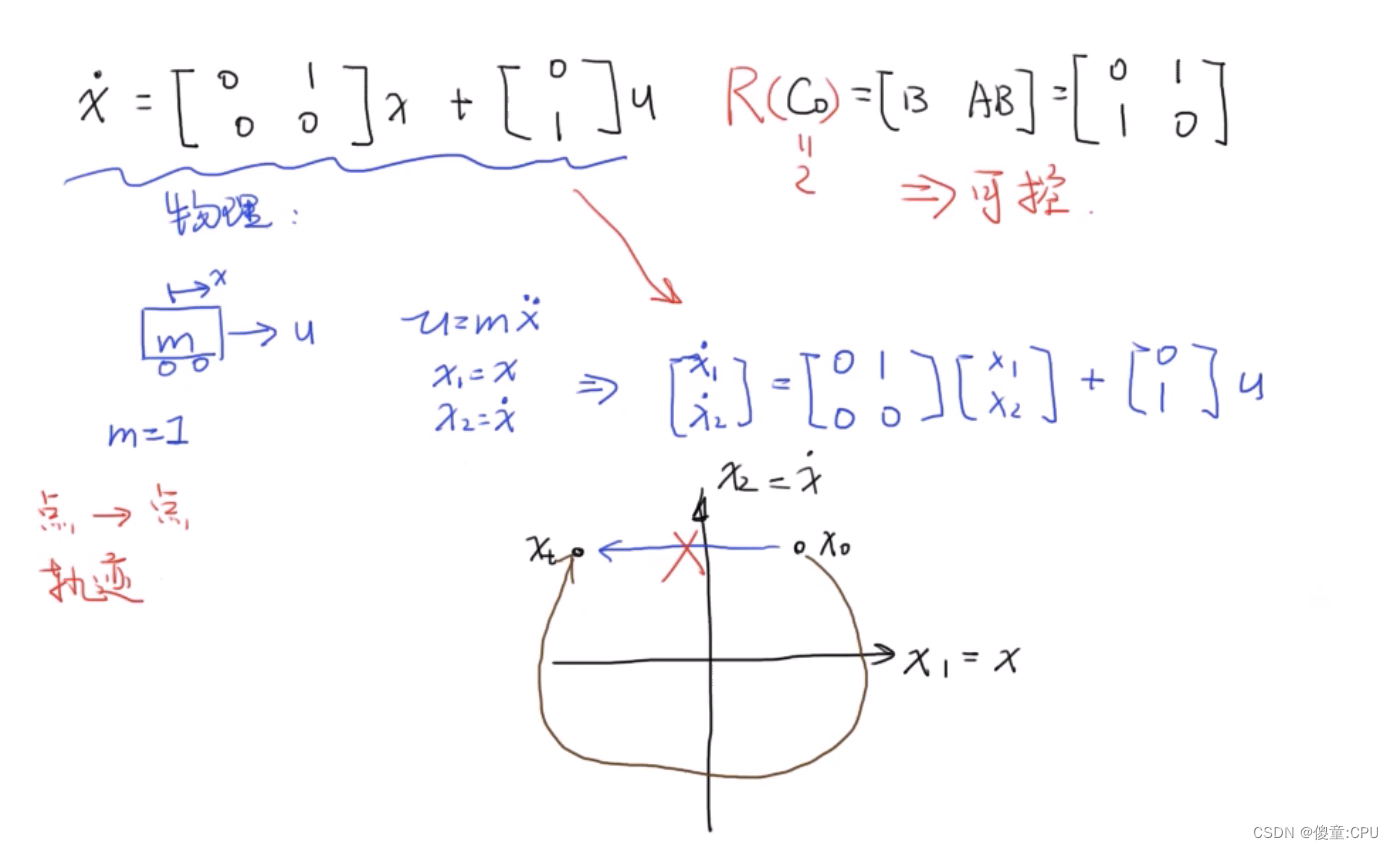
例子
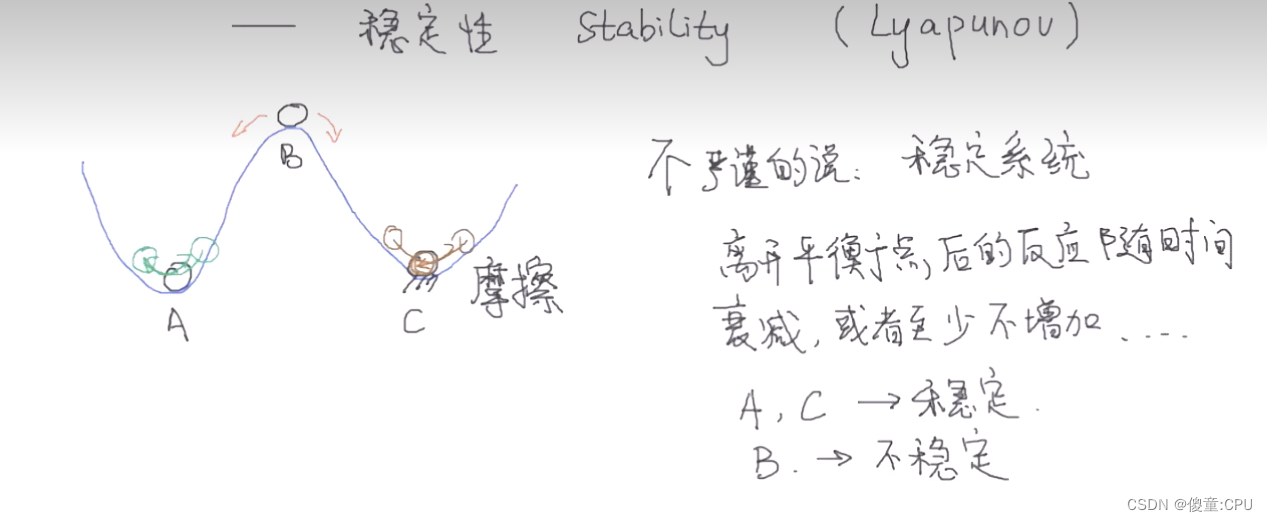
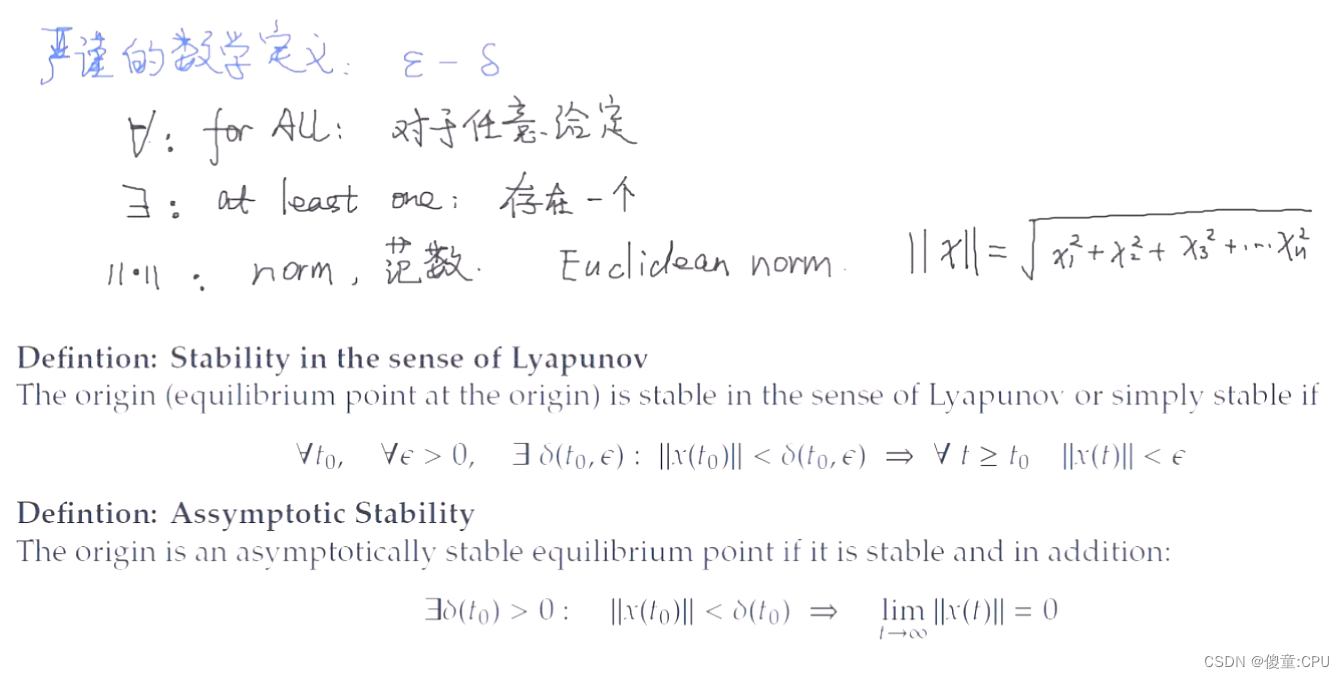
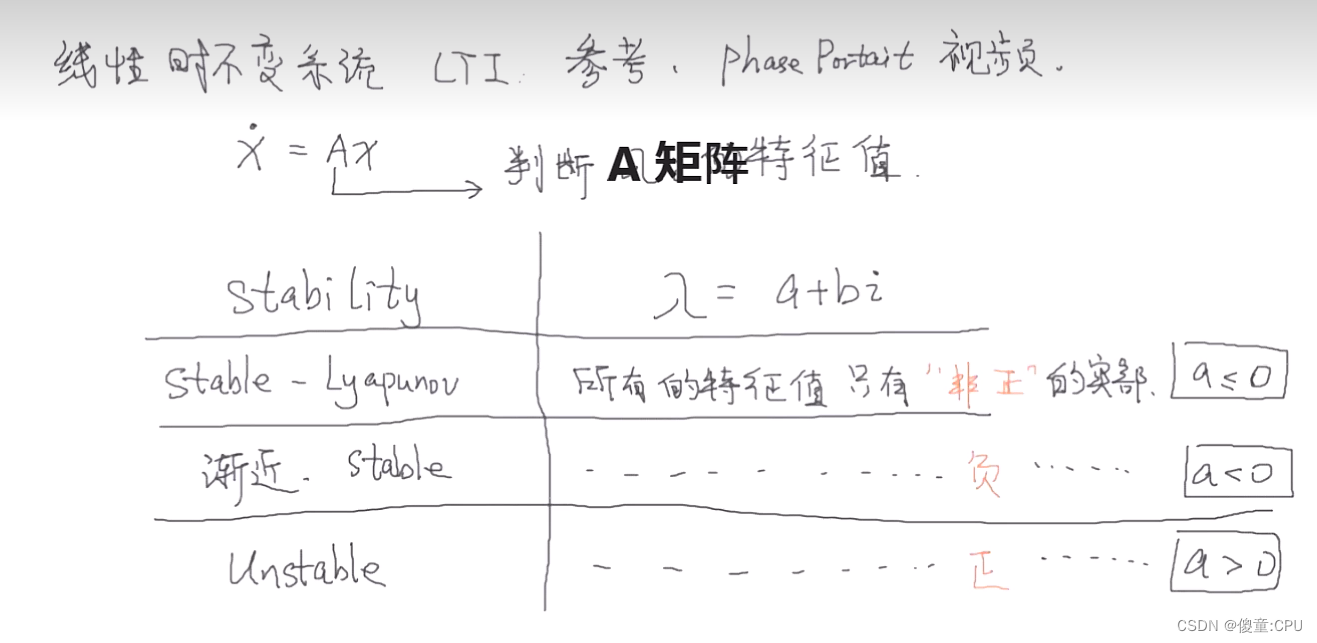
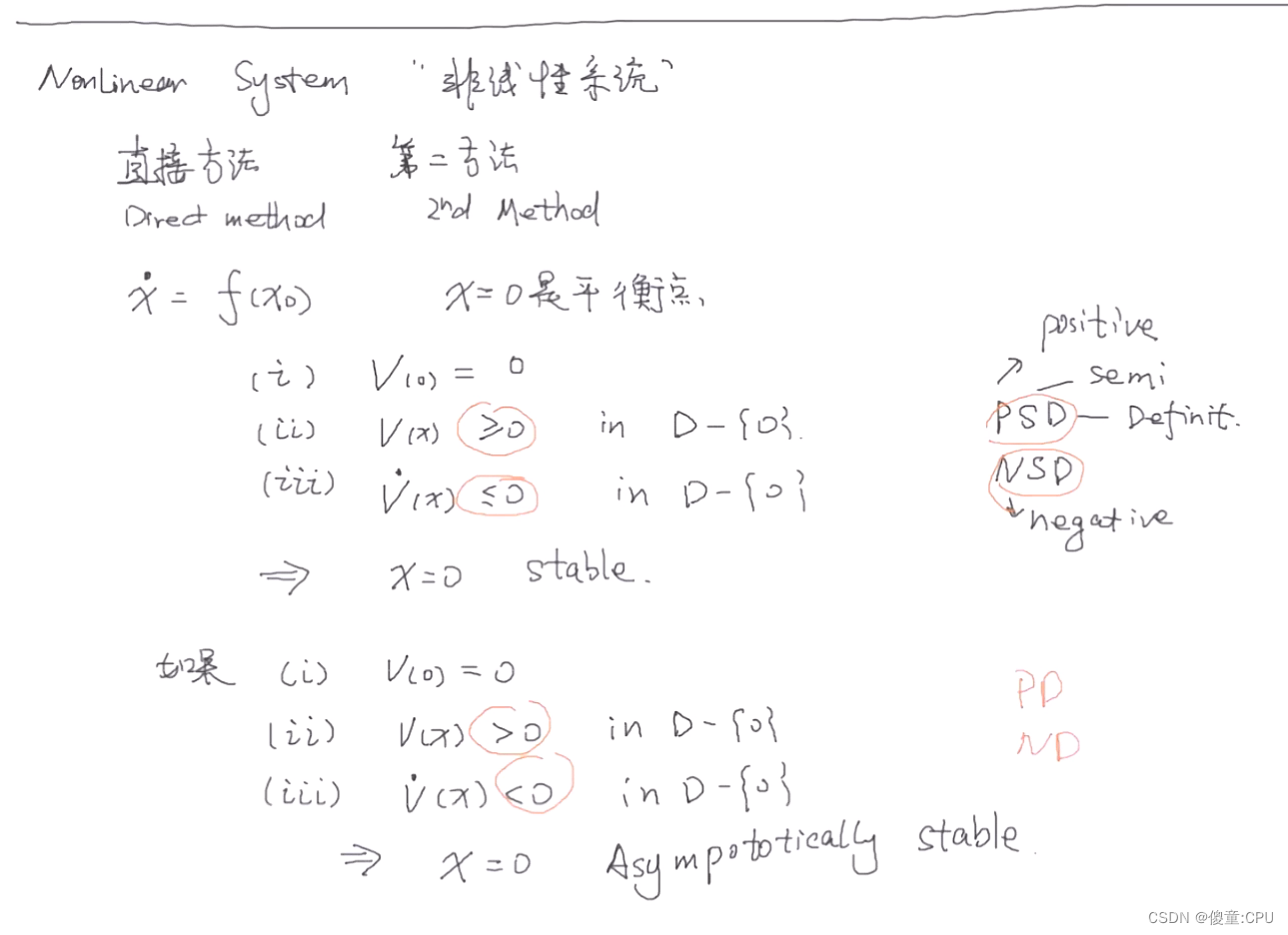
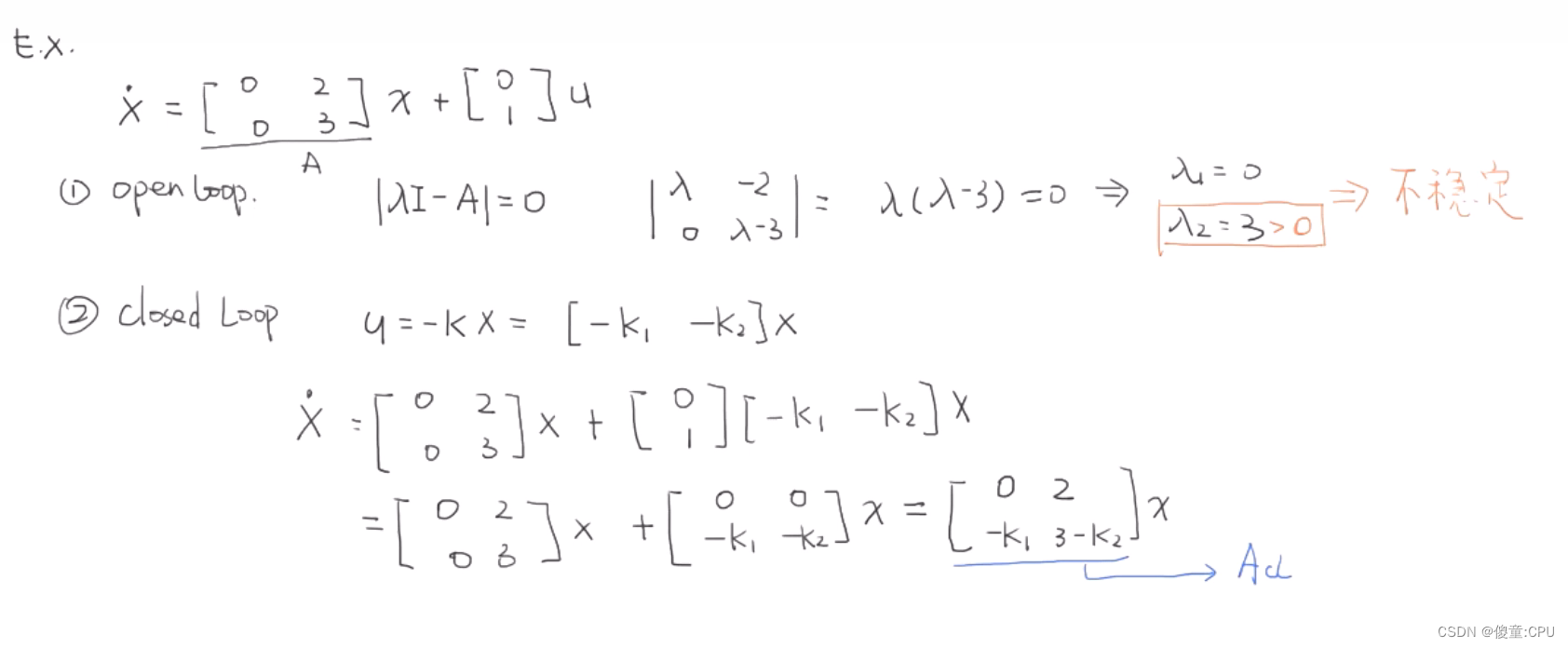
稳定性

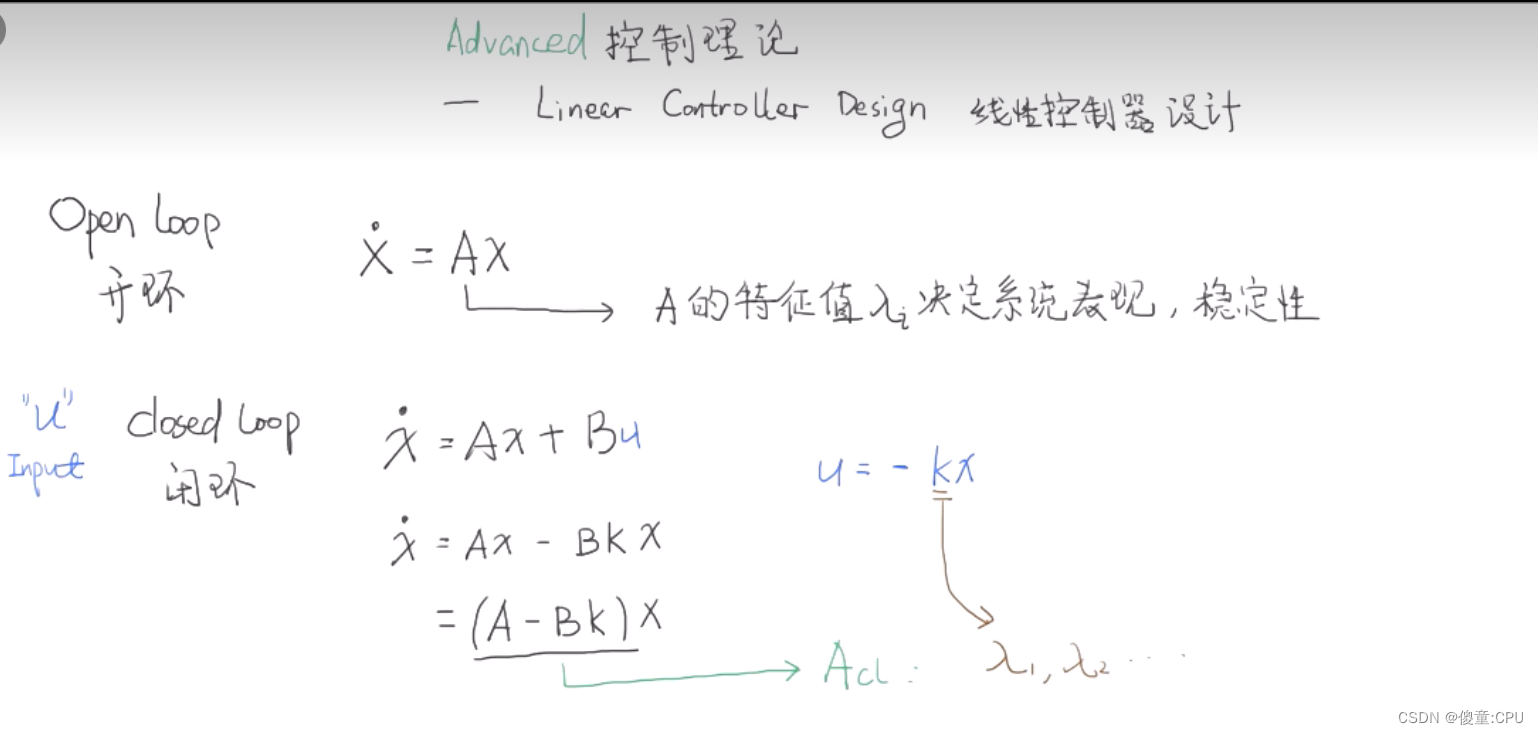
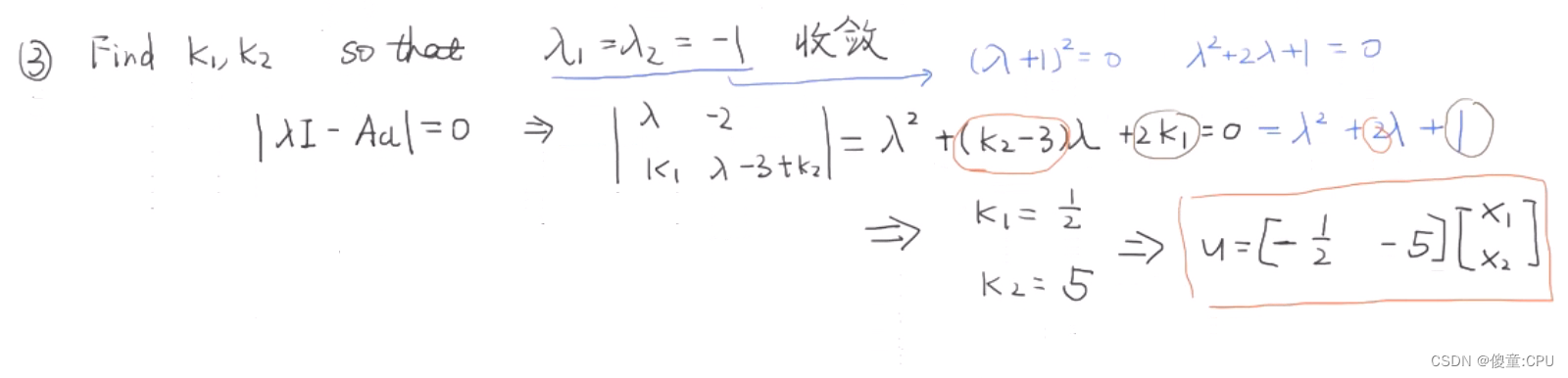
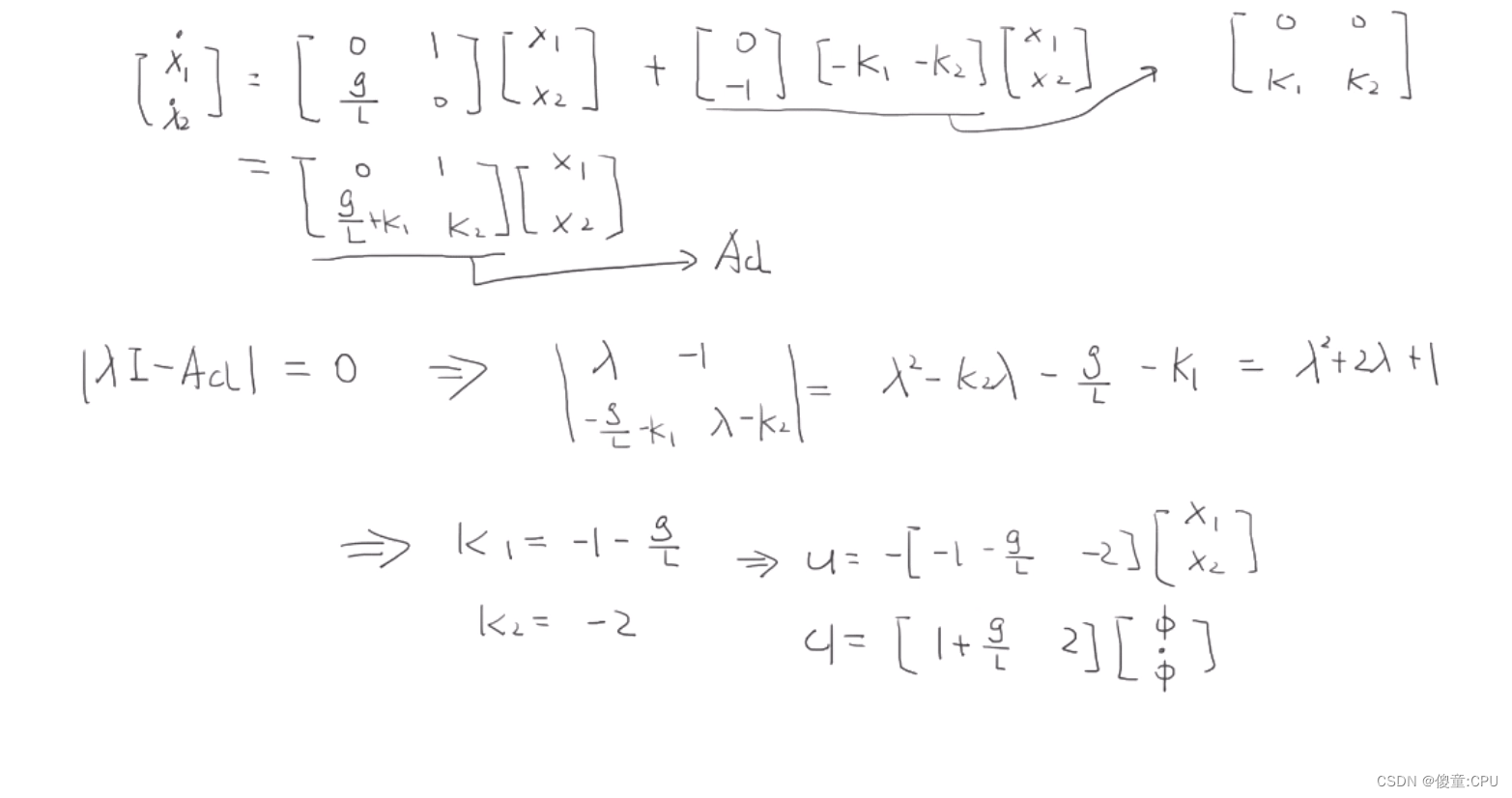
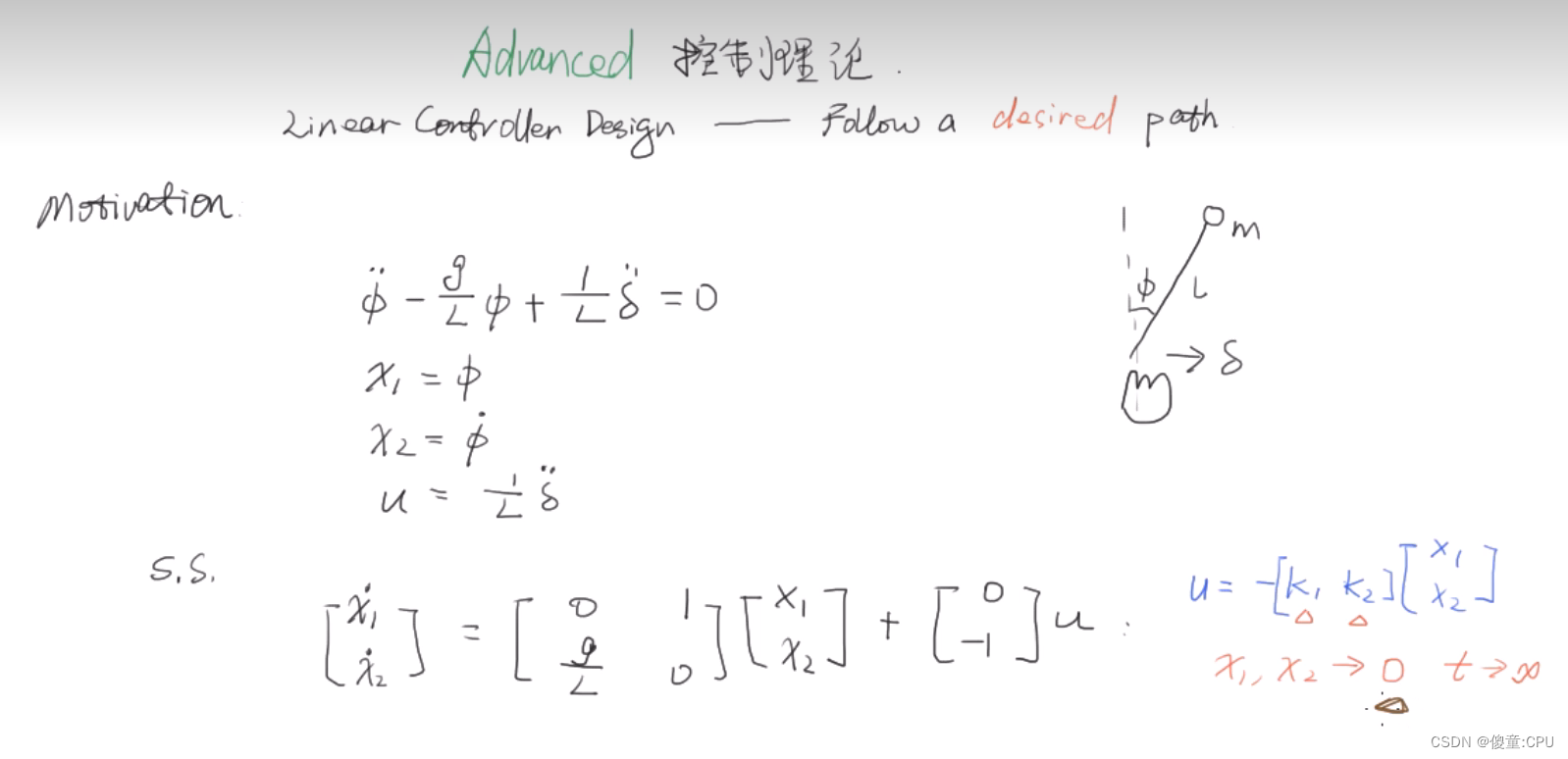
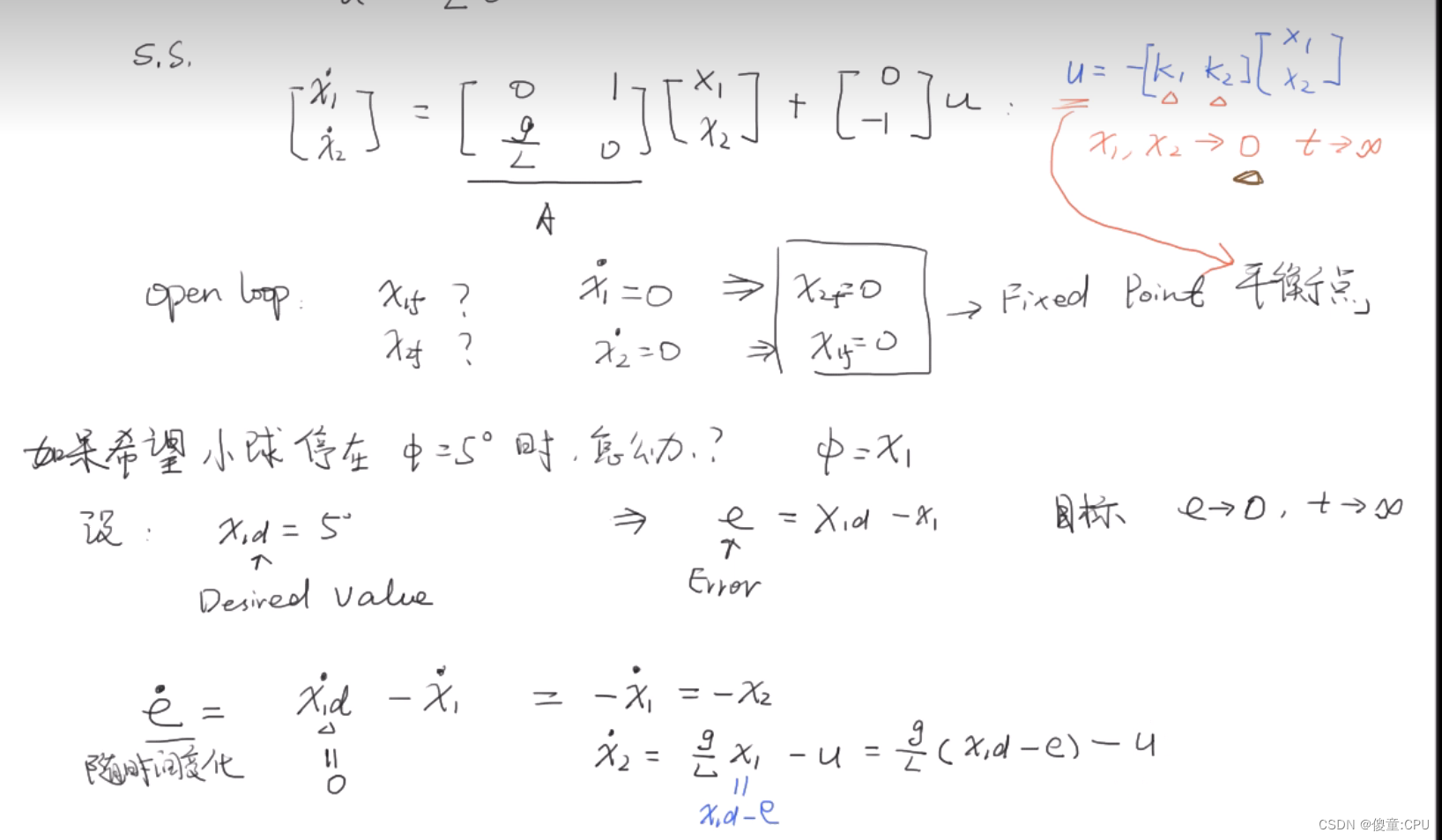
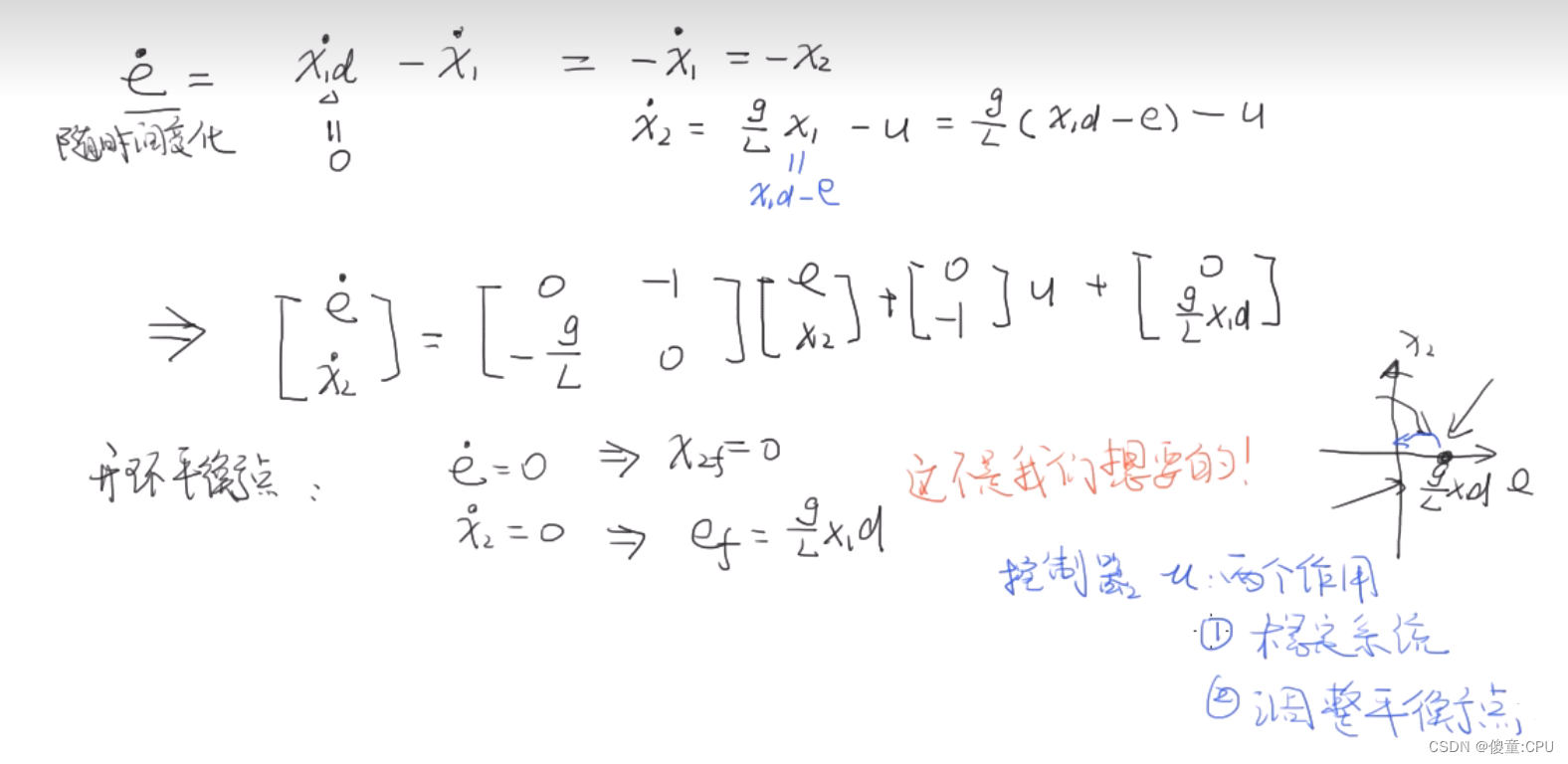
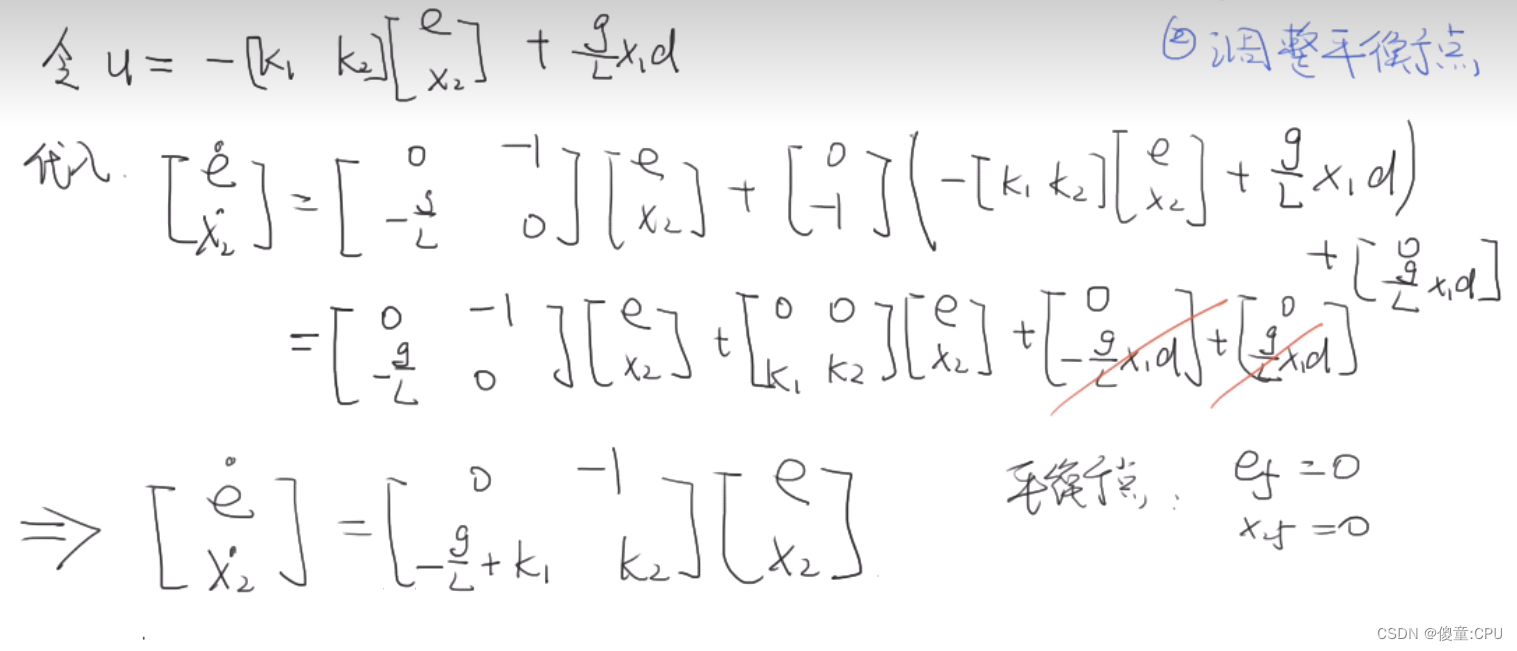
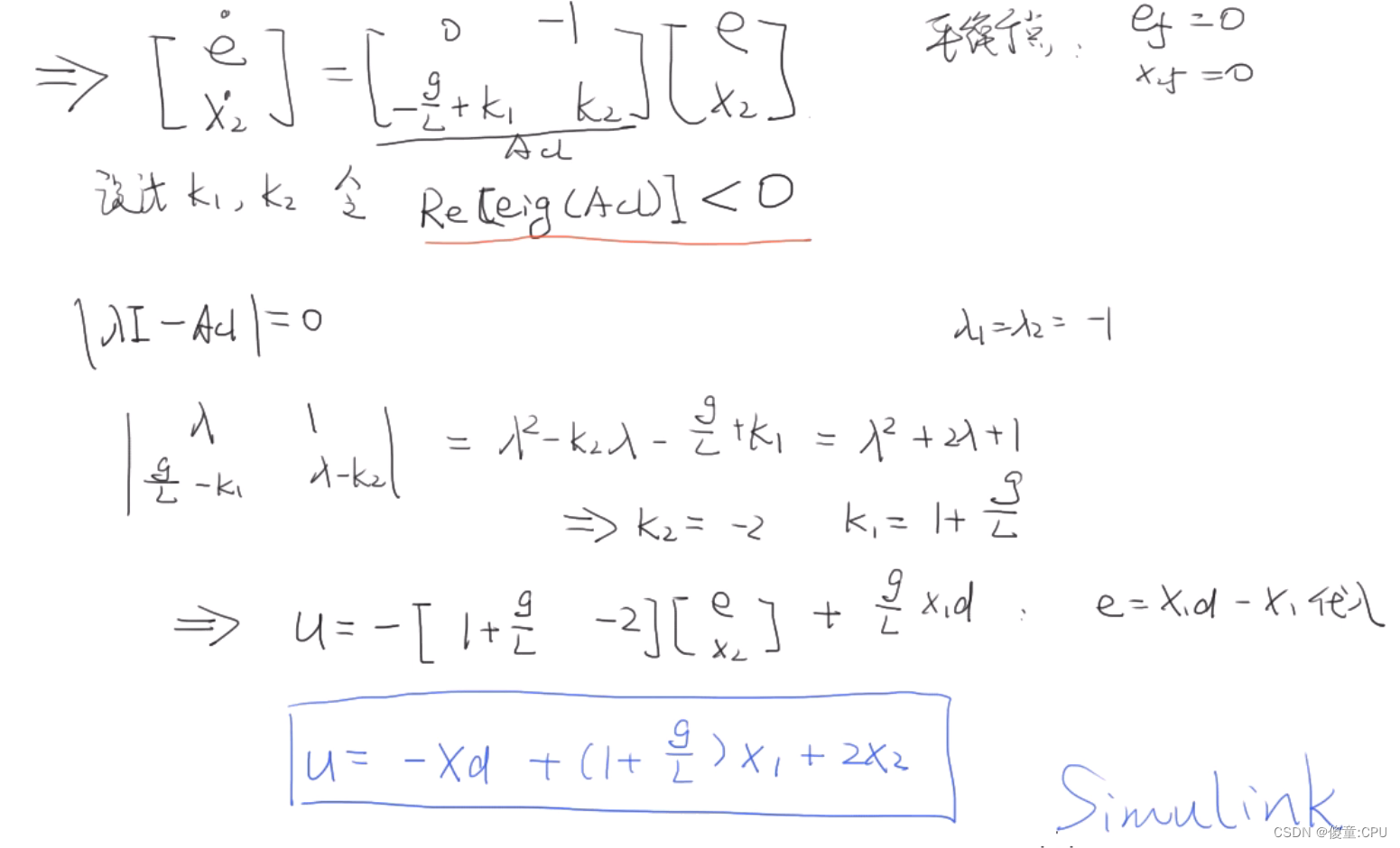
线性控制器
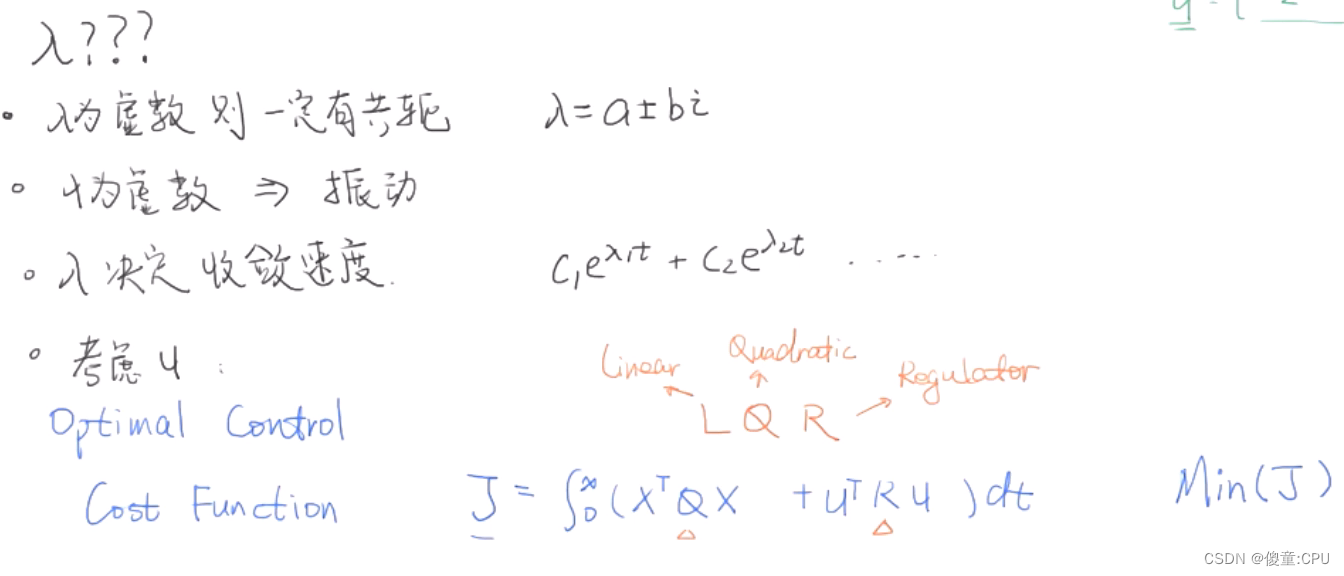
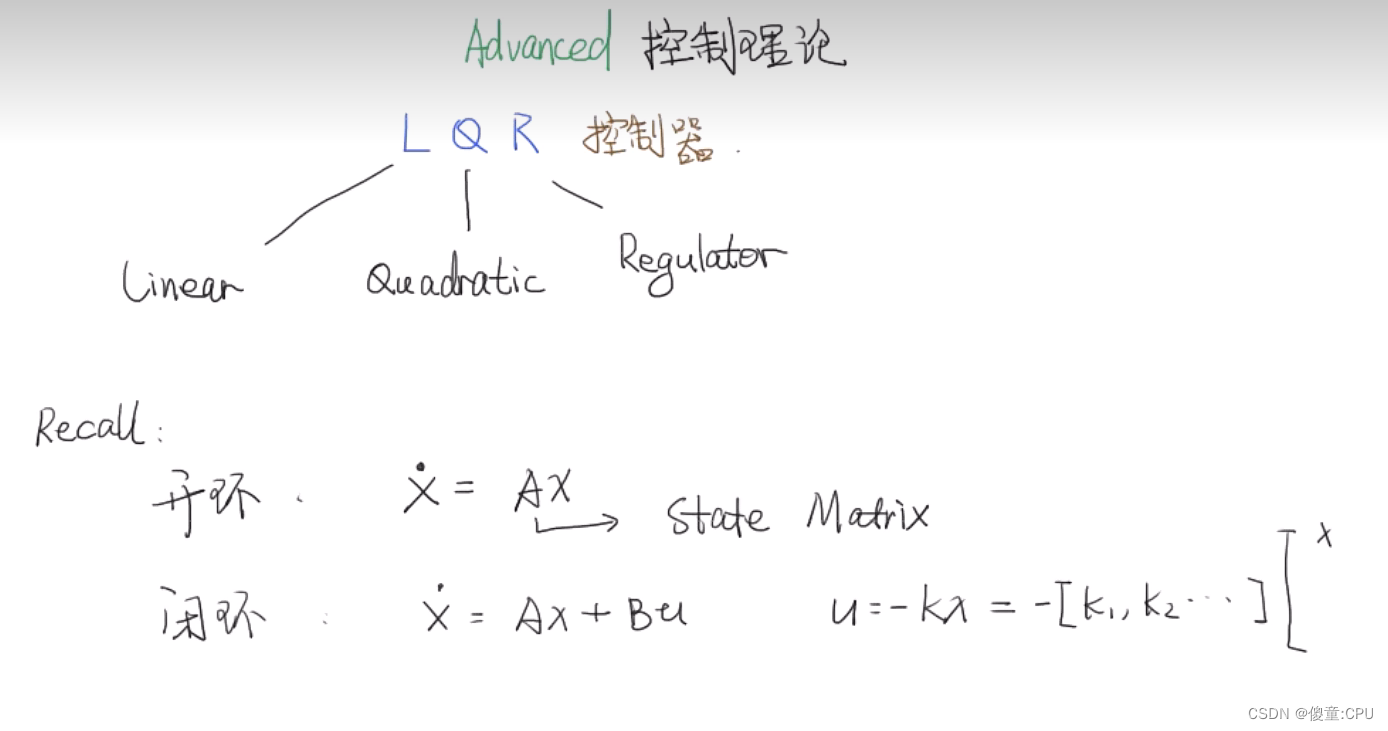
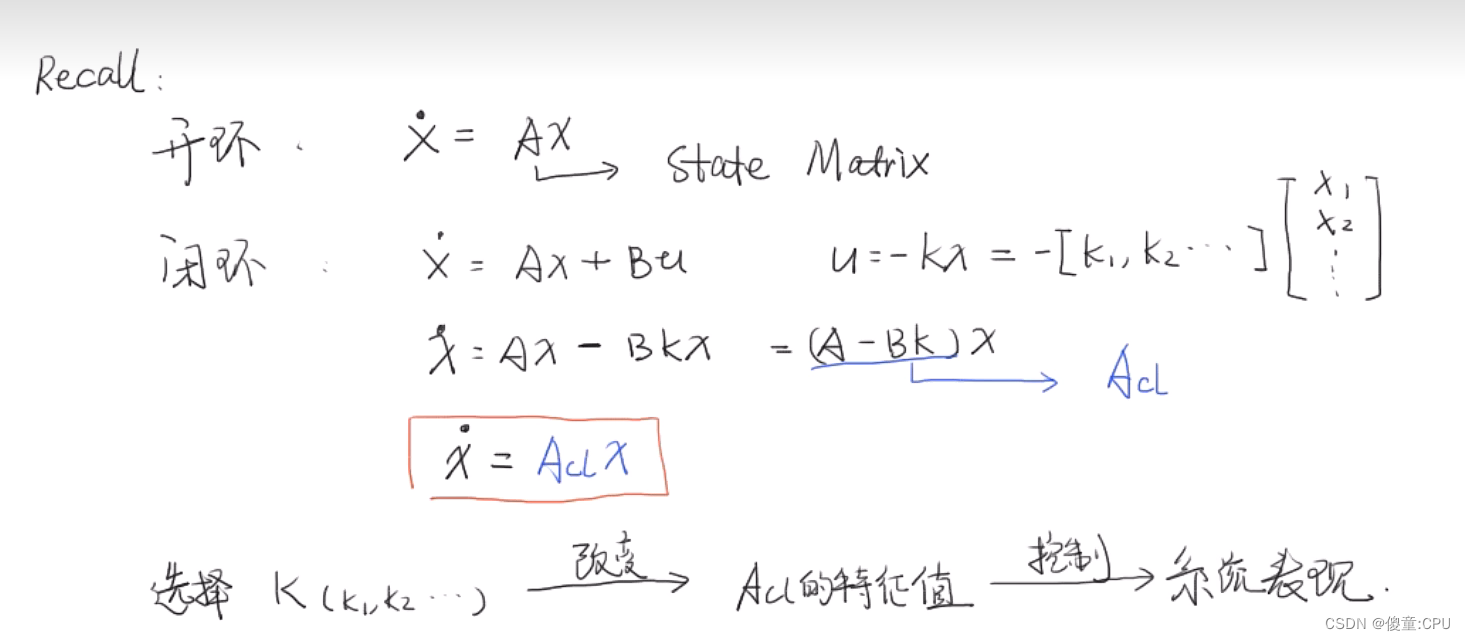
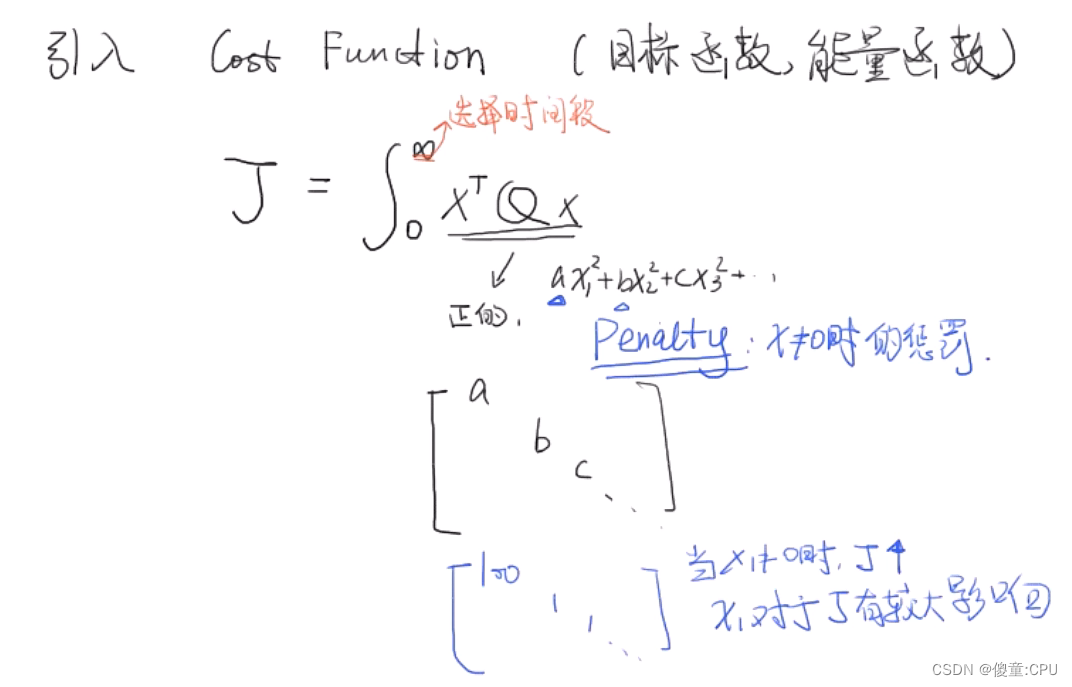
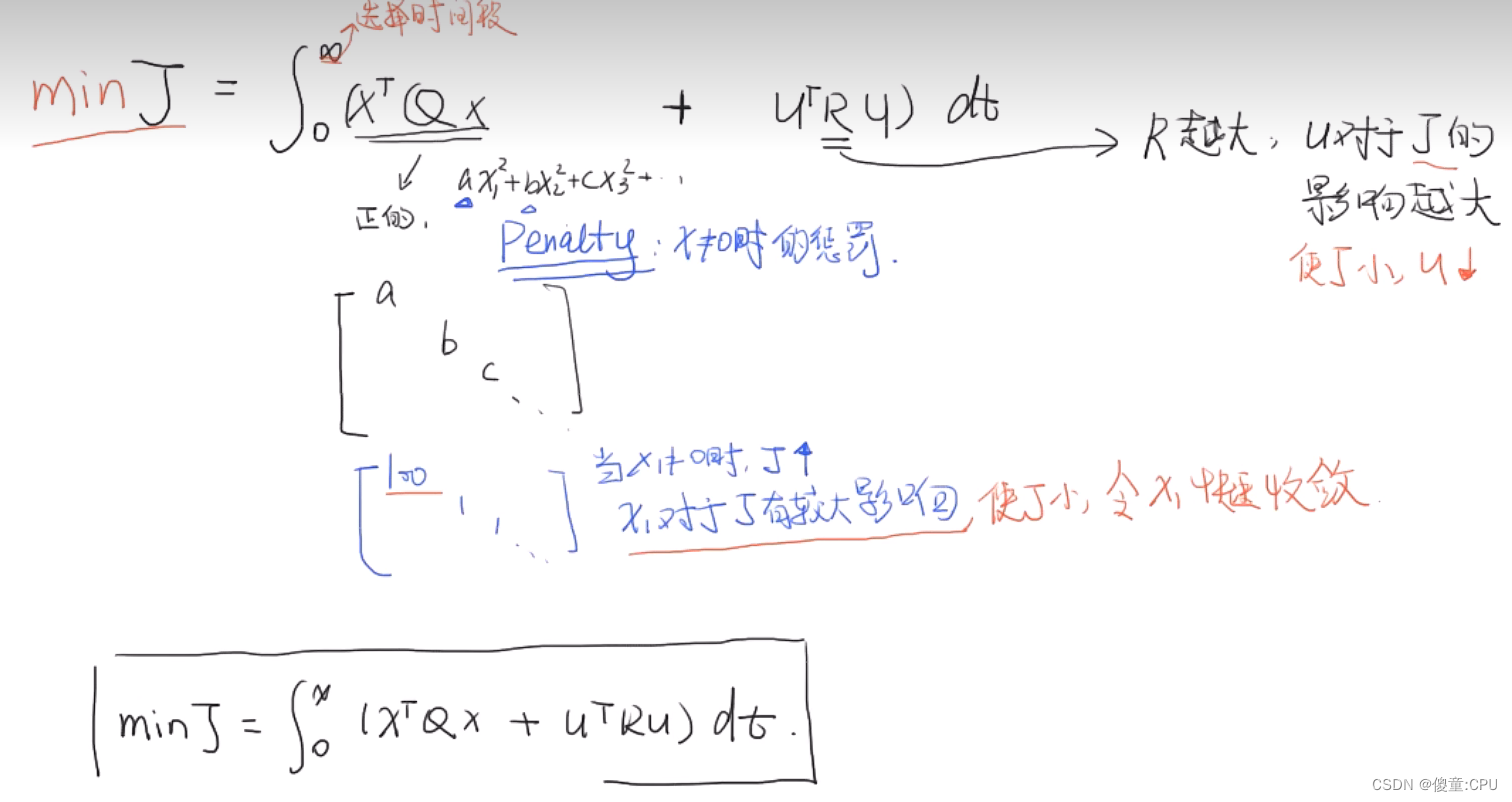
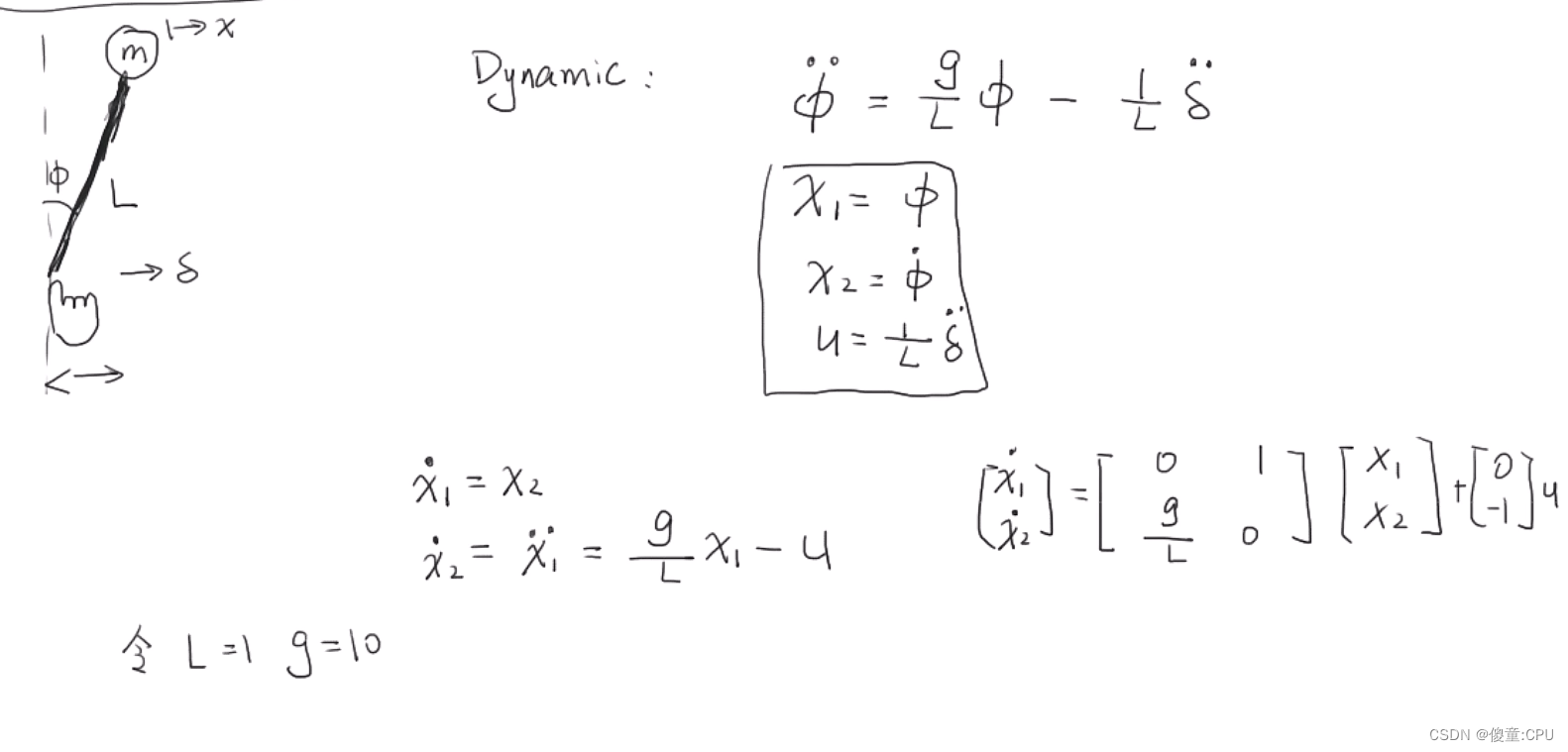
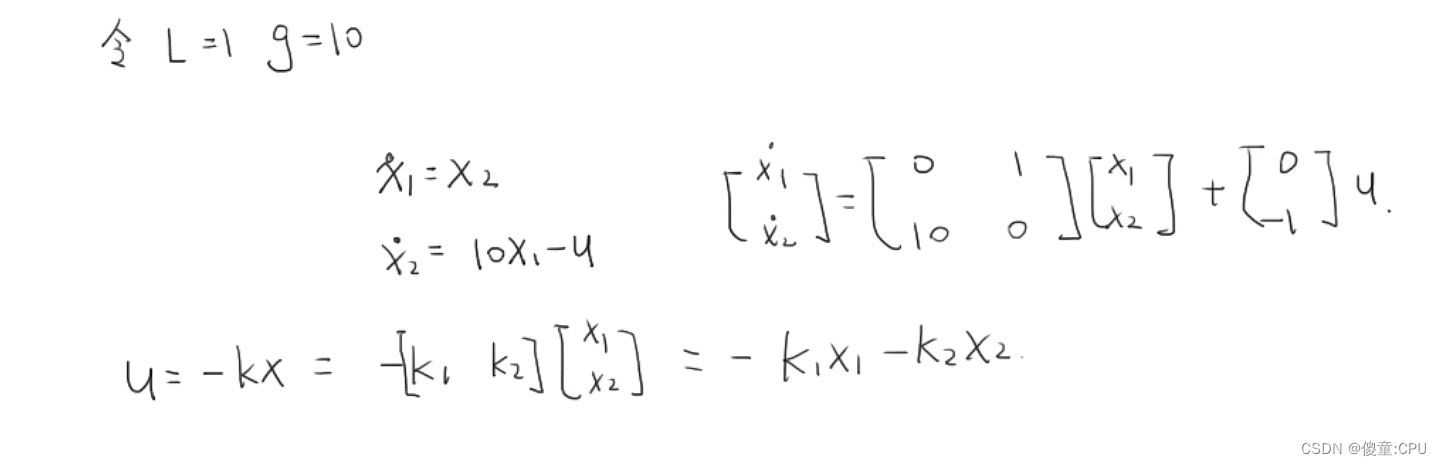
LQR控制器
轨迹跟踪
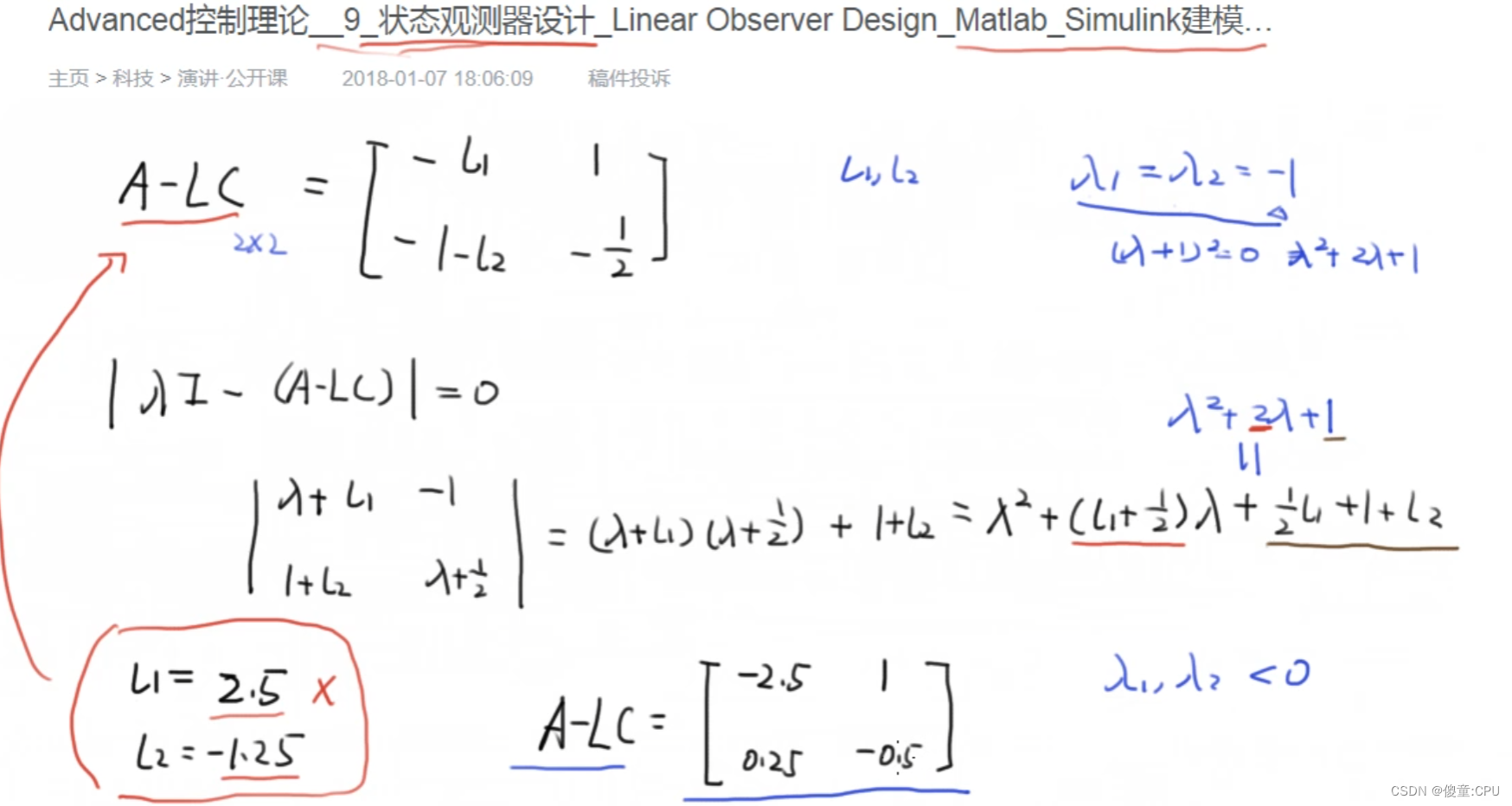
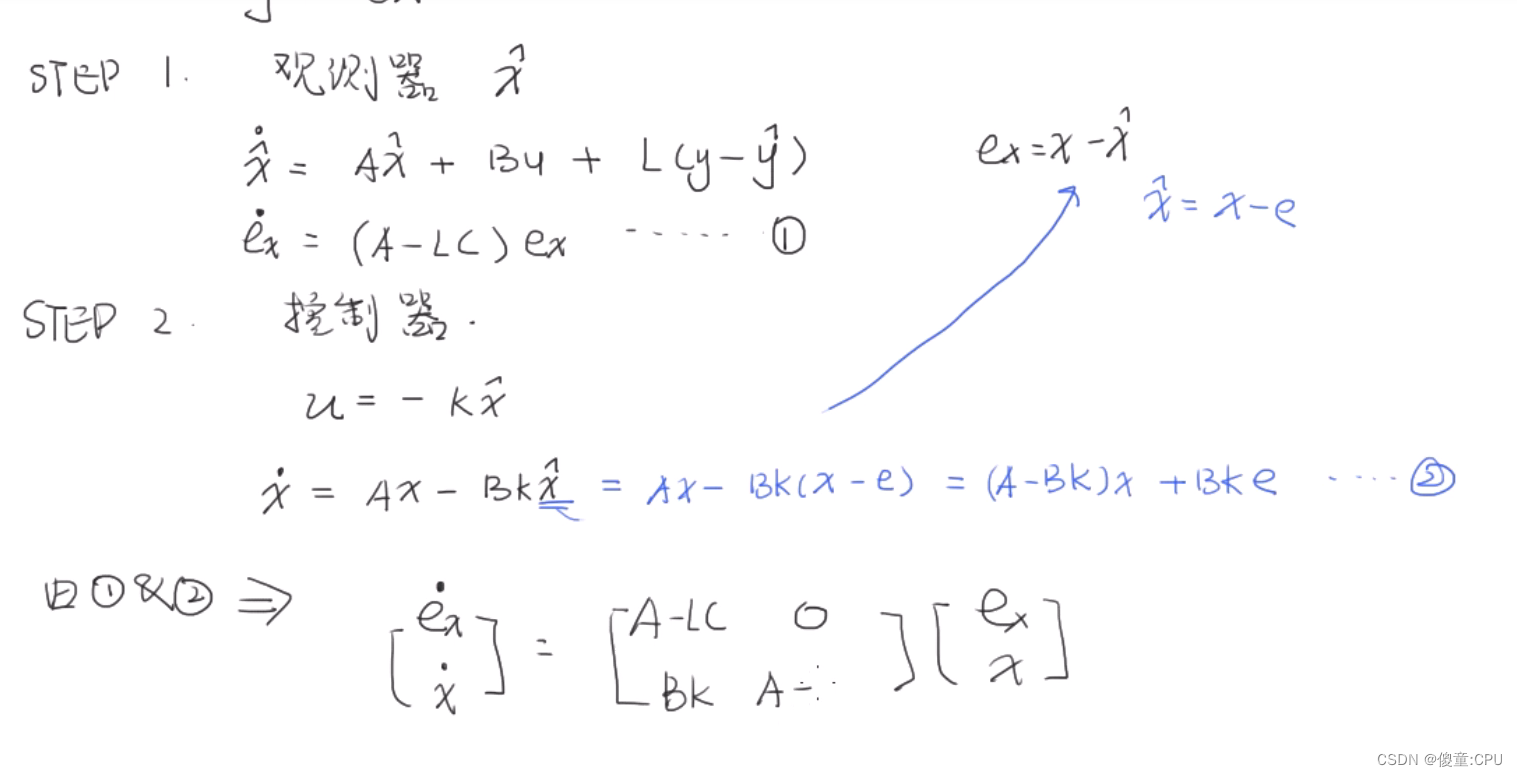
状态观测器设计
根据系统的外部变量(输入变量和输出变量)的实测值得出状态变量估计值的一类动态系统,也称为状态重构器。








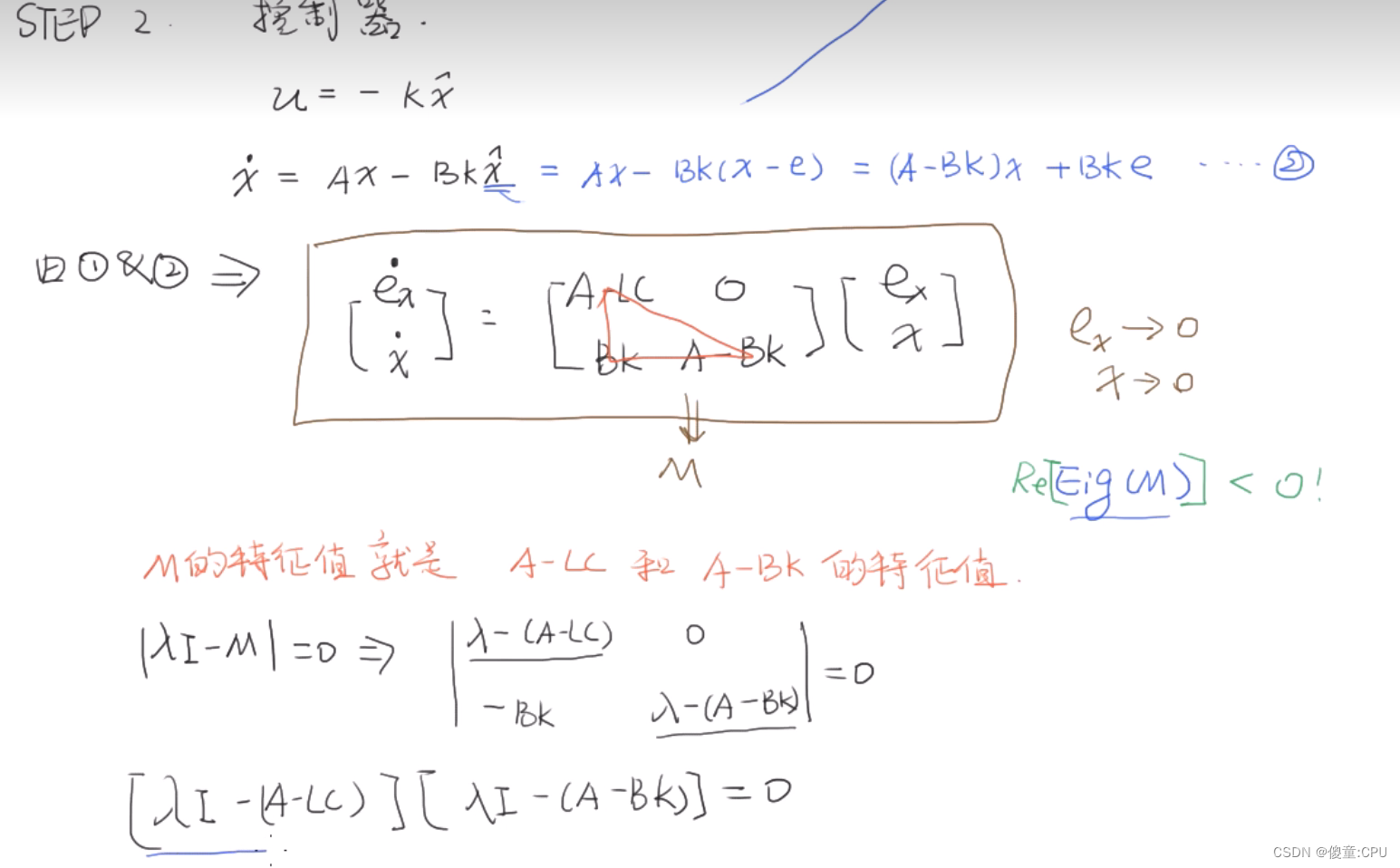
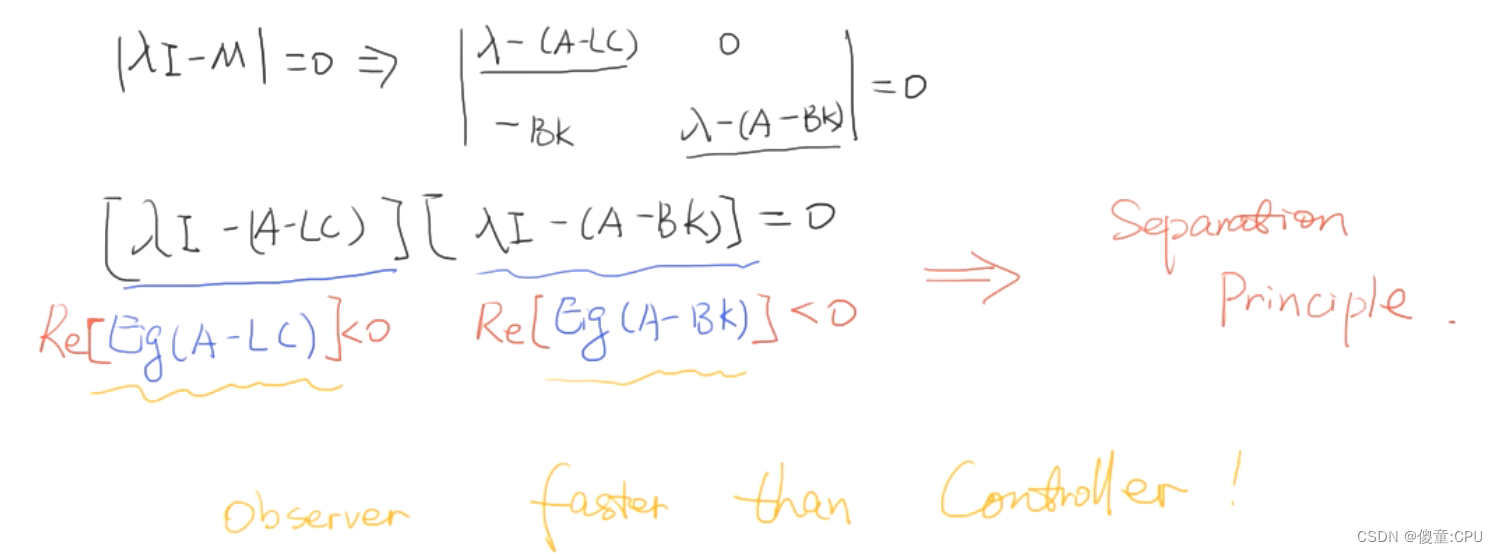
矩阵特征值的一个性质

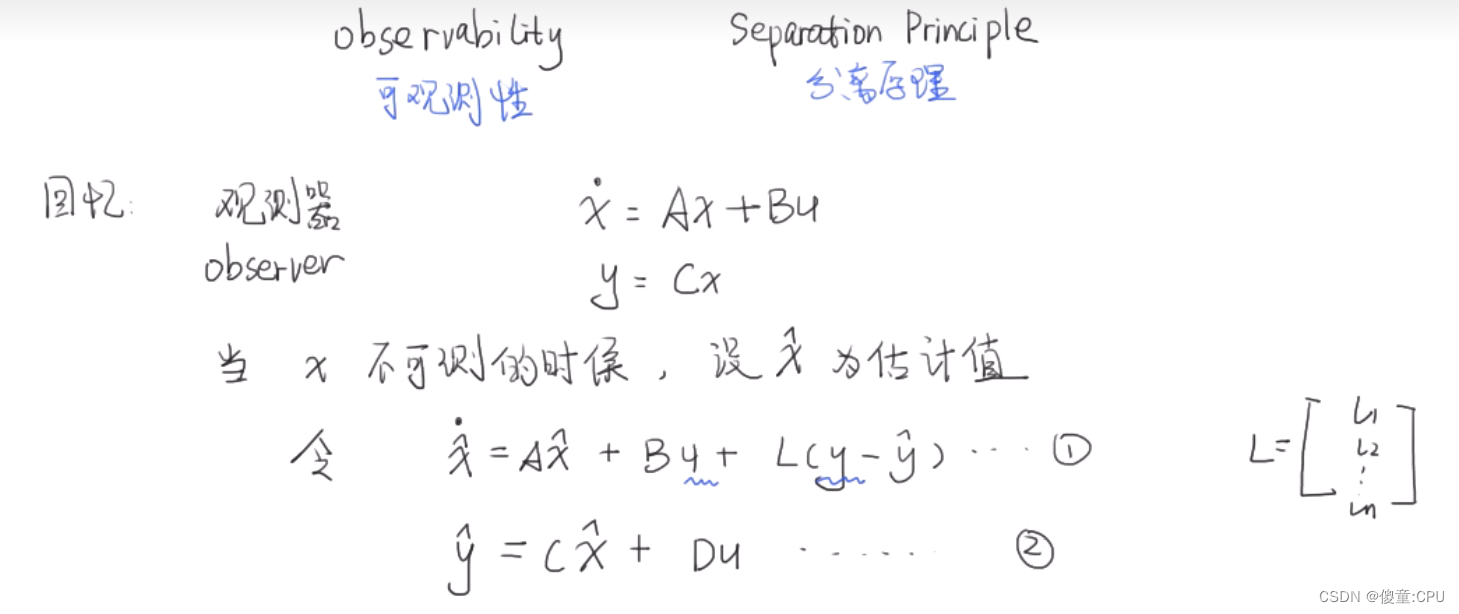
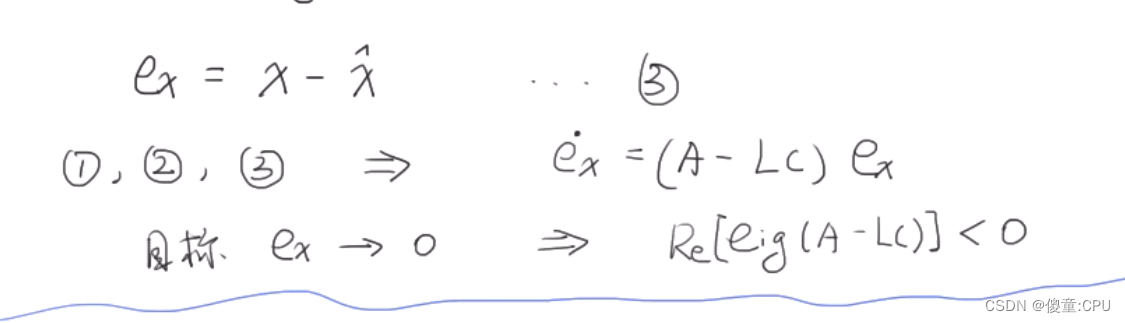
可观测性、分离原理

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/21677.html