
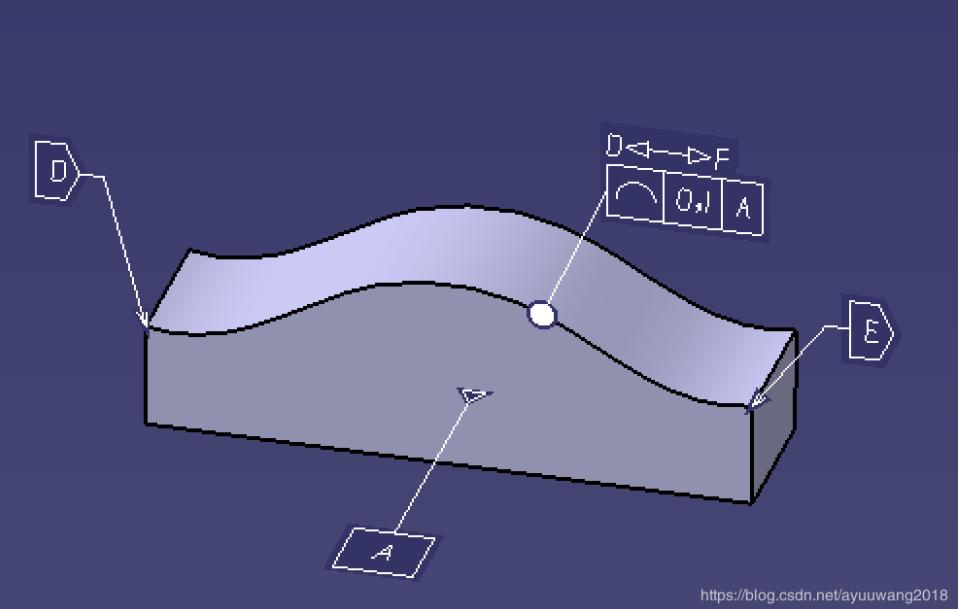
如图1所示,D到E的曲面相对于A进行线轮廓度约束。这个设计没有定义还不够充分,0.1线轮廓度的公差带大小虽然确定,但没有明确约束方向,相对于A基准有两个方向,如图2和图3。
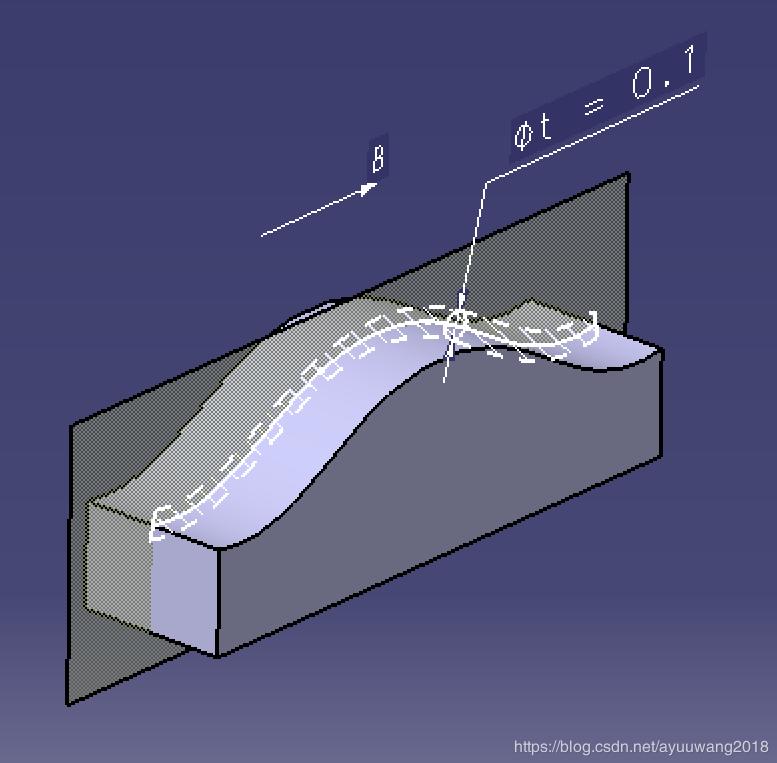
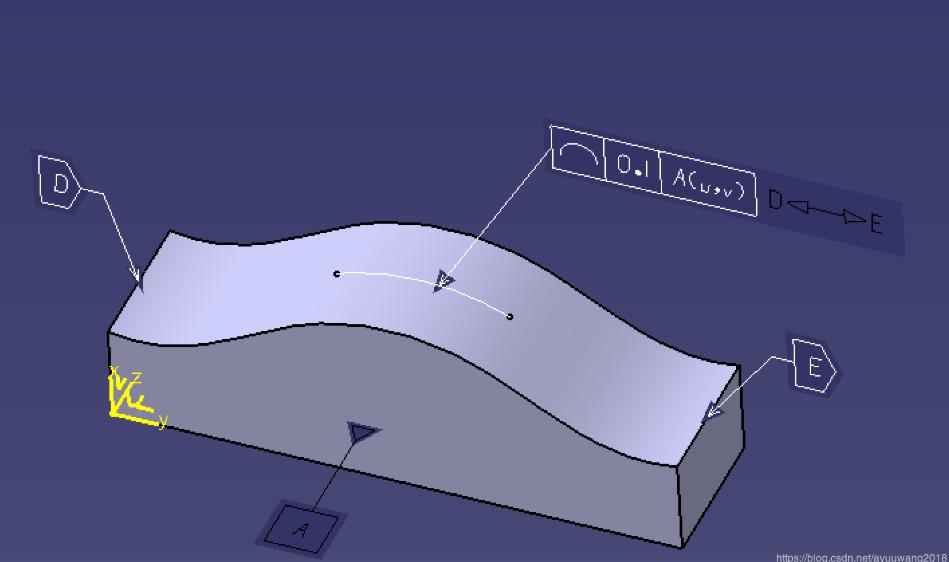
图2. 一种视图方向的可能,平行于A基准任意相交面,公差带为宽度为t=0.1mm等距线
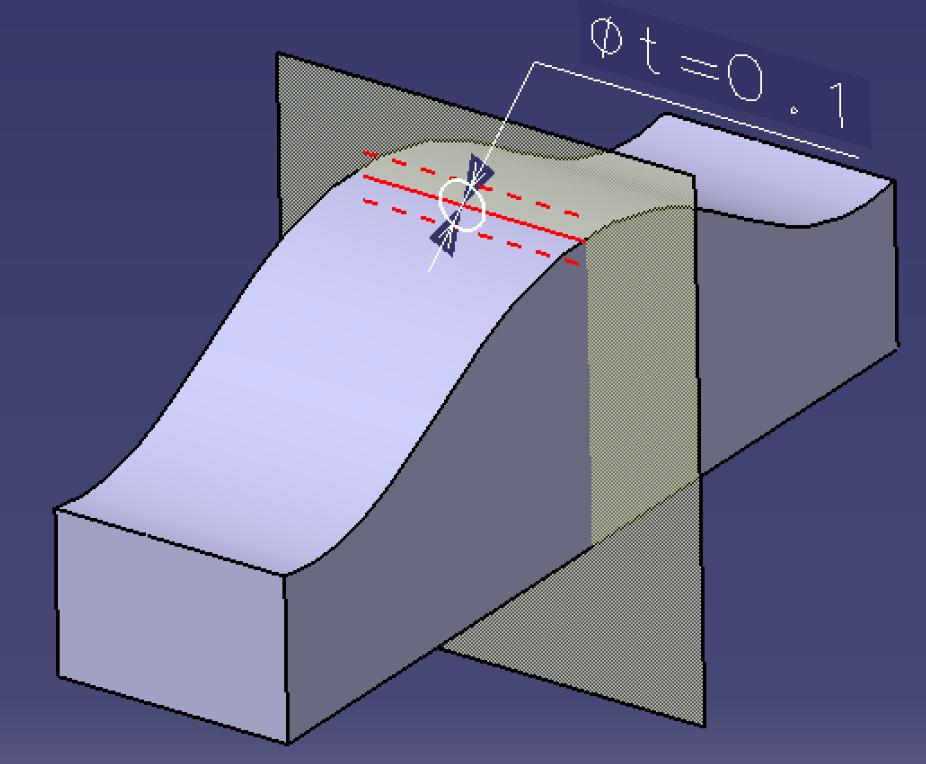
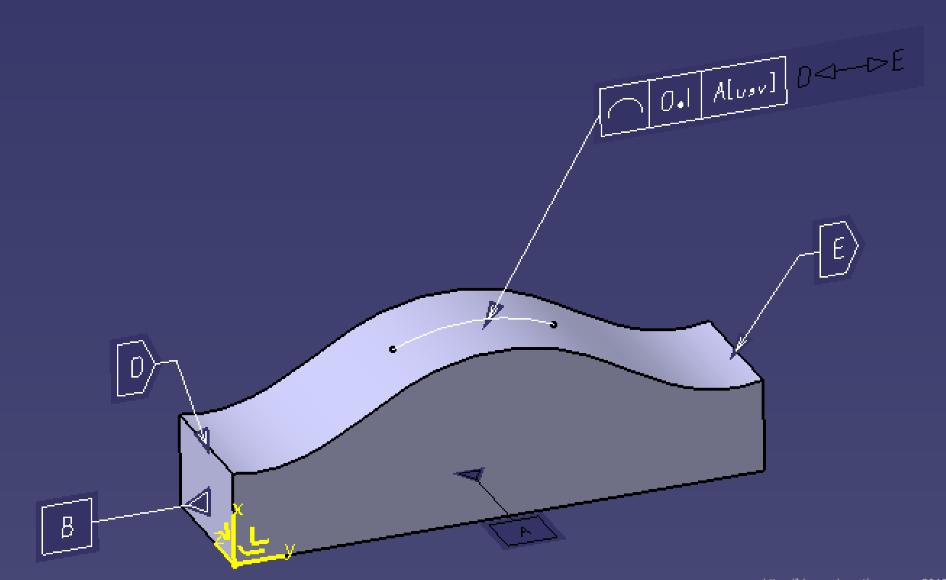
图3. 另一种可能定义的方向,垂直于A基准的任意相交面
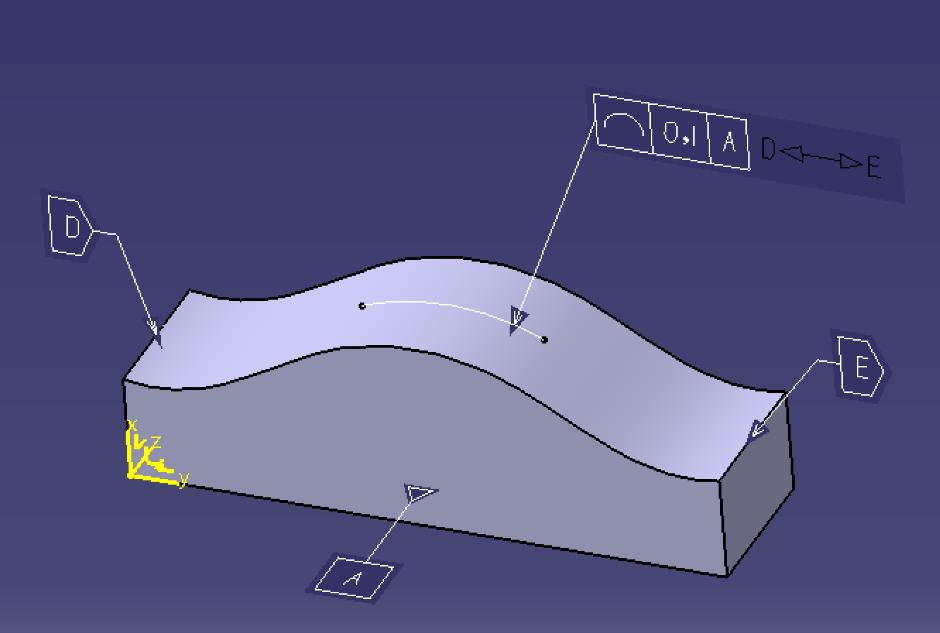
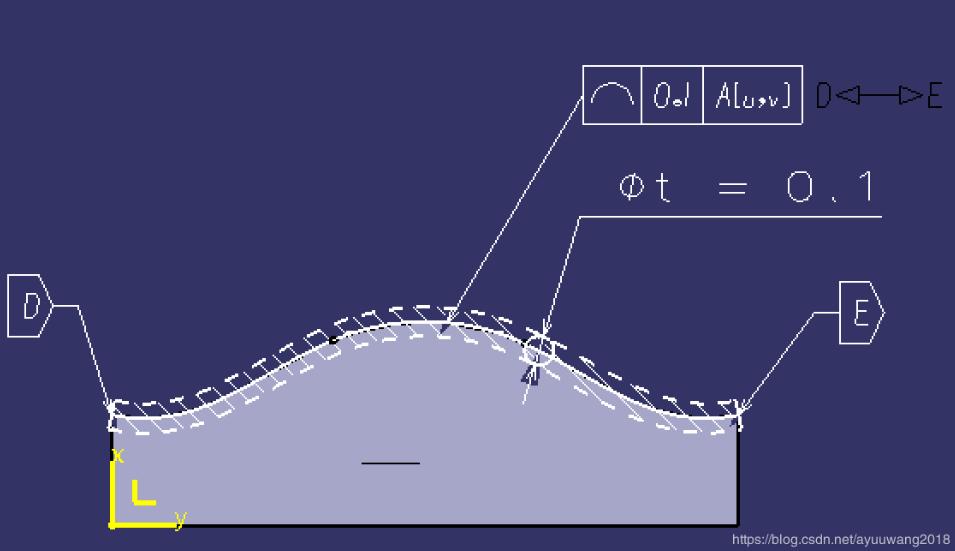
图4. ASME的充分定义方法,完成了如图5的公差带方向定义,为了充分定义图5要求的设计公差带,A基准允许自定义信息,增加u,v约束符号,约束了线轮廓度公差带在x轴和y轴方向上不能旋转,表示线轮廓度公差带平行于A基准,即平行于左下角坐标系定义的XY面定义。充分定义要求了三个必要要素,
明确的坐标系参考、
数模上要求参考线标识公差带方向,
公差控制框中的基准需要有自定义的约束信息。
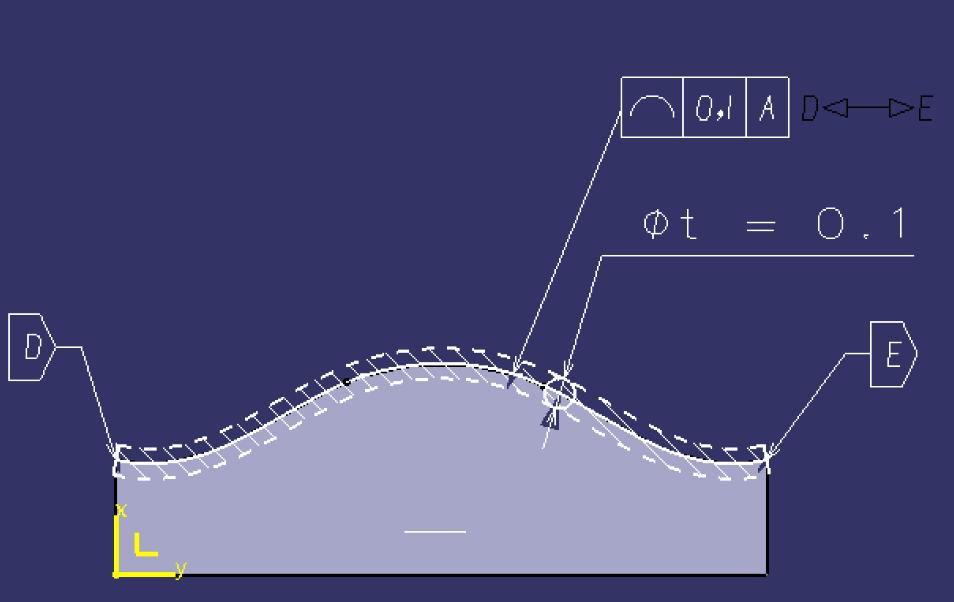

图5. 公差带的图解
思考
图6增加了基准B(w),如何解释这个设计的公差带?
————————————————
版权声明:本文为CSDN博主「GDT王廷强」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
#转载请注明出处 www.skcircle.com 《少有人走的路》勇哥的工业自动化技术网站。如果需要本贴图片源码等资源,请向勇哥索取。
收藏 | 0点赞 | 0打赏作者
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/18502.html