
话不多说,今天给大家梳理下国内3D视觉科研级以及产品级模组,为大家模组选型时做一个参考。
主要分为如下板块:

讯享网


物品 数量 备注 相机 2 海康 镜头 2 8mm/12mm/16mm DLP 投影仪 1 型号:3010 连接板 1 用于固定相机和投影仪 数据连接线和触发线 若干
三脚架 1
配套标定板 1
三脚架 1
配套标定板 1
推荐理由:
1、提供界面算法源码,为一般初学者可以节约至少1~2年的开发时间成本
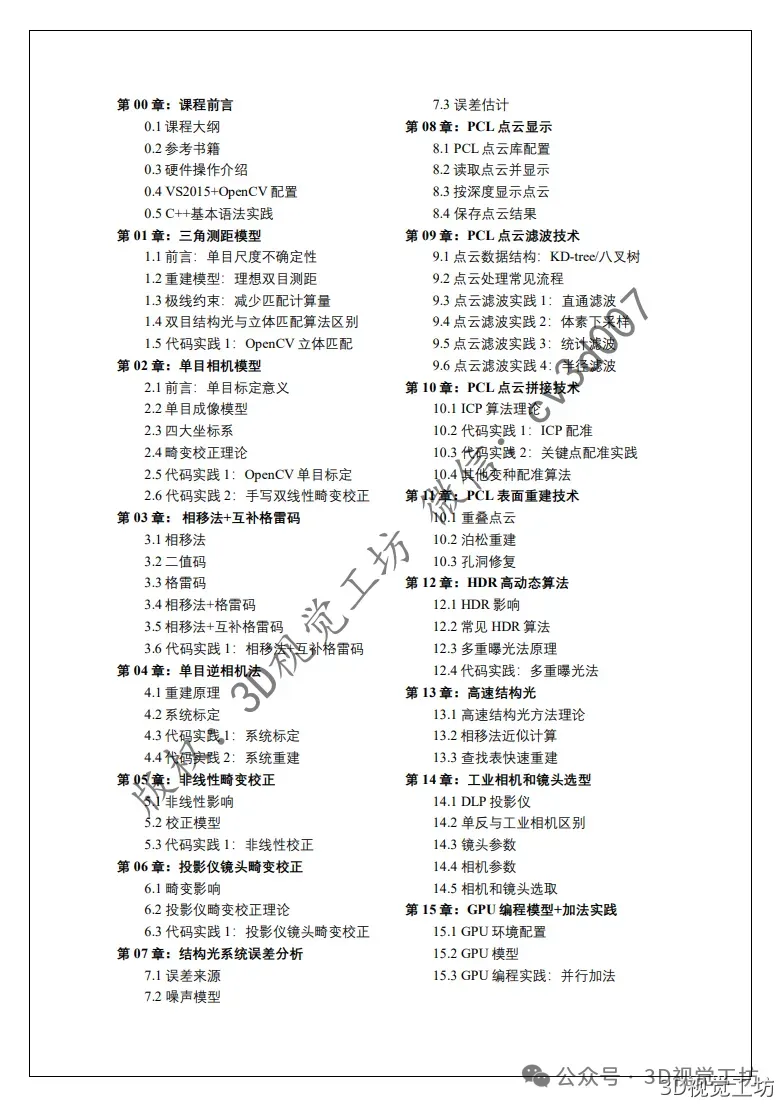
整套结构光技术相关算法
- 相移条纹:相移法+互补格雷码的条纹生成、解码程序
- 单目重建:标定、重建、畸变校正、点云显示
- 双目重建:标定、重建、畸变校正、点云显示
- Gamma: Gamma校正程序,有效地降低非线性误差
- HDR算法:多重曝光HDR算法,有效应对高反光重建场景
2、附赠结构光三维重建高阶班专属视频课程+课件,全网独家。
3、贴心答疑服务
一年答疑服务。每个购买本产品的客户,我们将会拉一个微信答疑群,有问题可以随时群里交流。问题可以涵盖本套硬件和代码方方面面的问题。

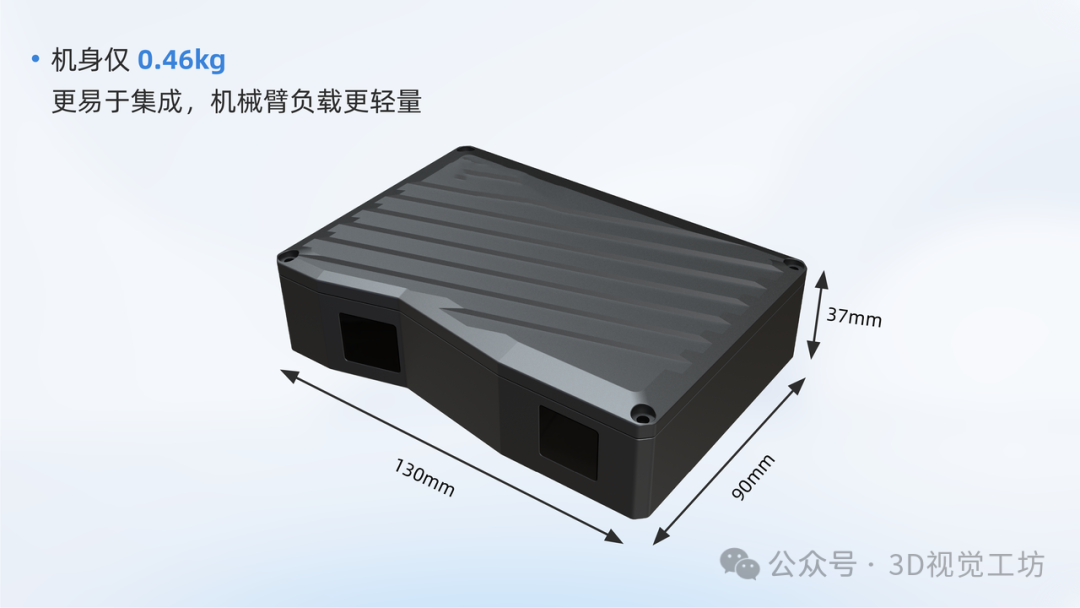
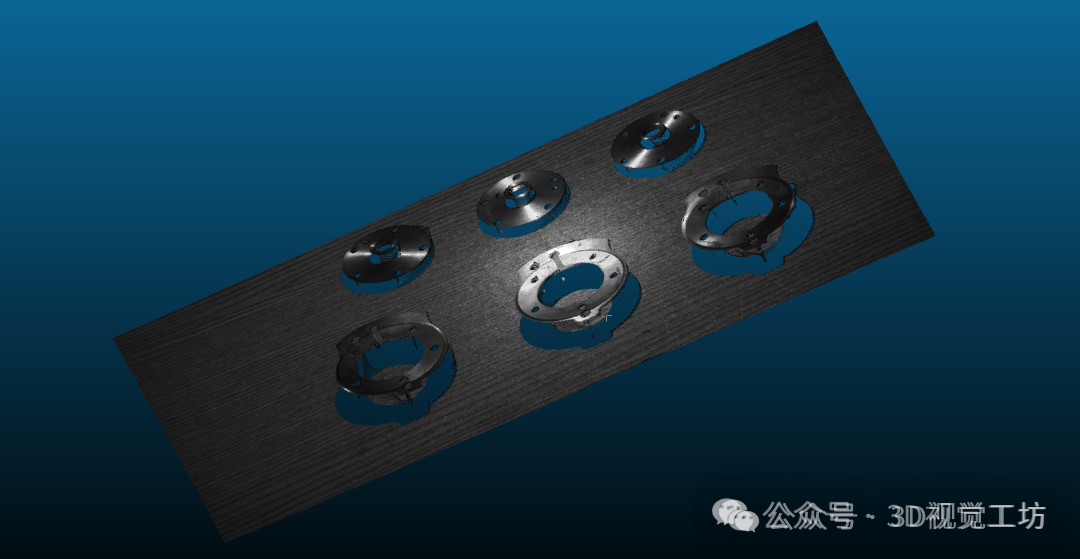
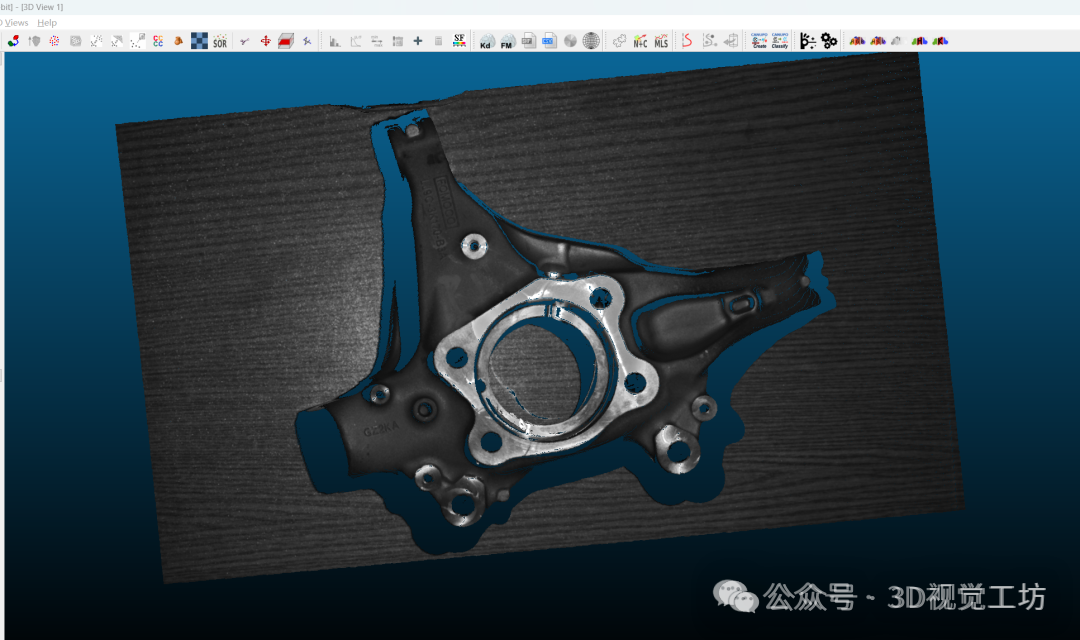
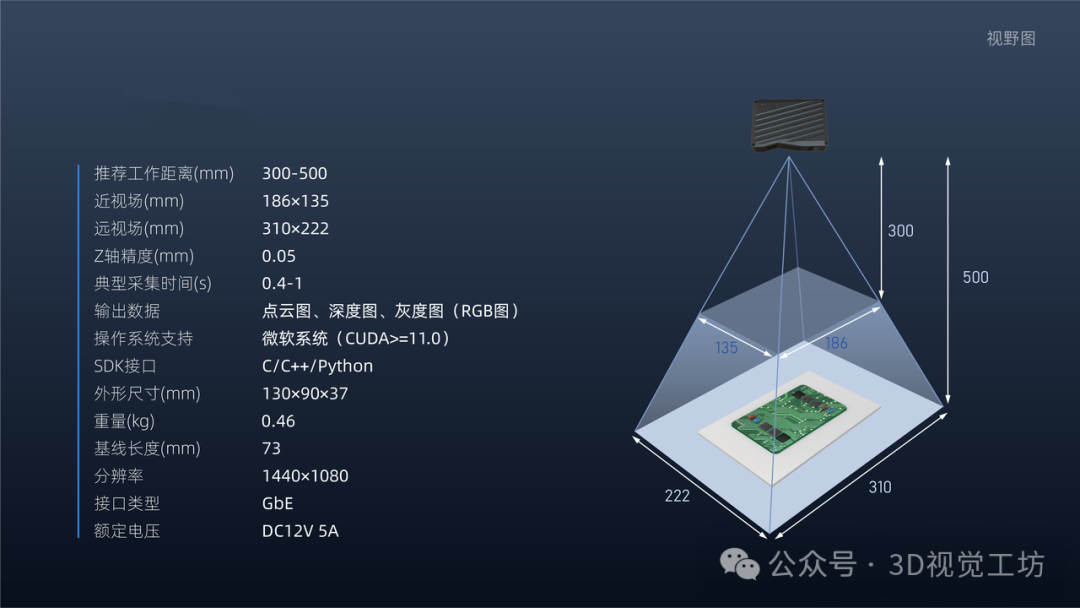
KW-MINI是一款轻量化DLP单目结构光3D相机,该相机采用主动结构光三维重建技术,具有超高精度、成像更快更精细、方案成熟稳定、出色的抗环境光等性能,并以其0.46kg的超轻重量非常适合现代工业对柔性化精确作业的需求。




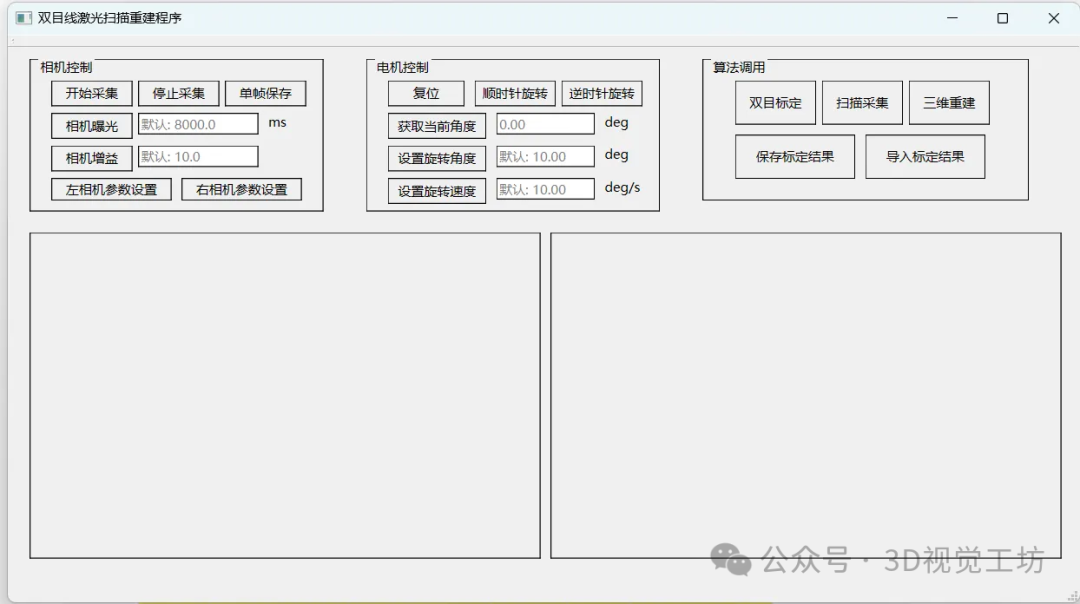
深迅V1(C++ QT界面代码)
深讯v1线结构光三维扫描仪硬件提供的源码,包含的功能如下:
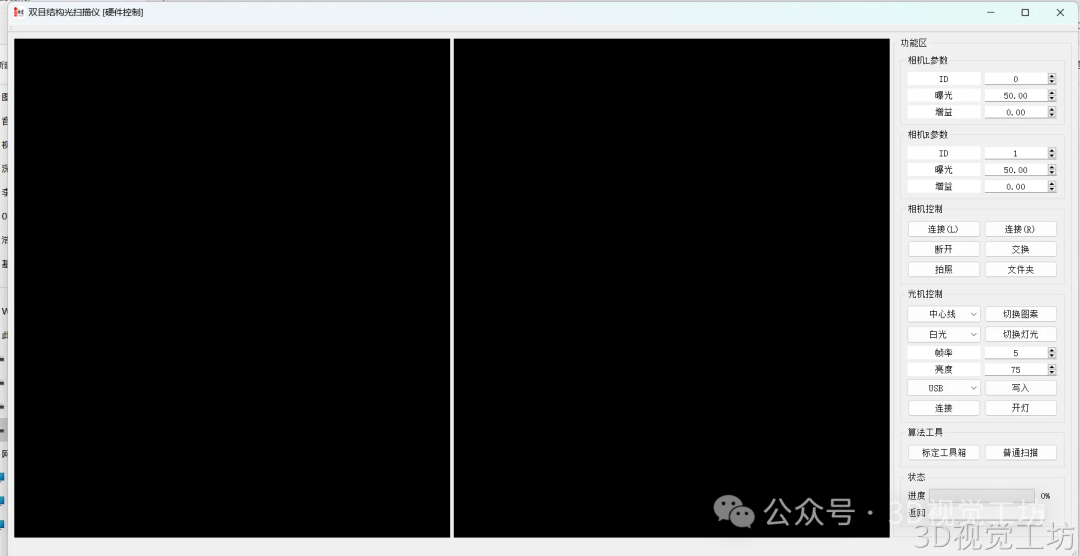
硬件控制
- 相机控制,如调整增益、曝光时间、拍照等
- 电机控制,如 旋转角度(双向)控制、旋转速度控制、触发相机拍照、输出转台角度等
- 激光器控制,如激光开关、激光强度调整等
- 支持调节相机基线距、相机安装角和扫描高度调节
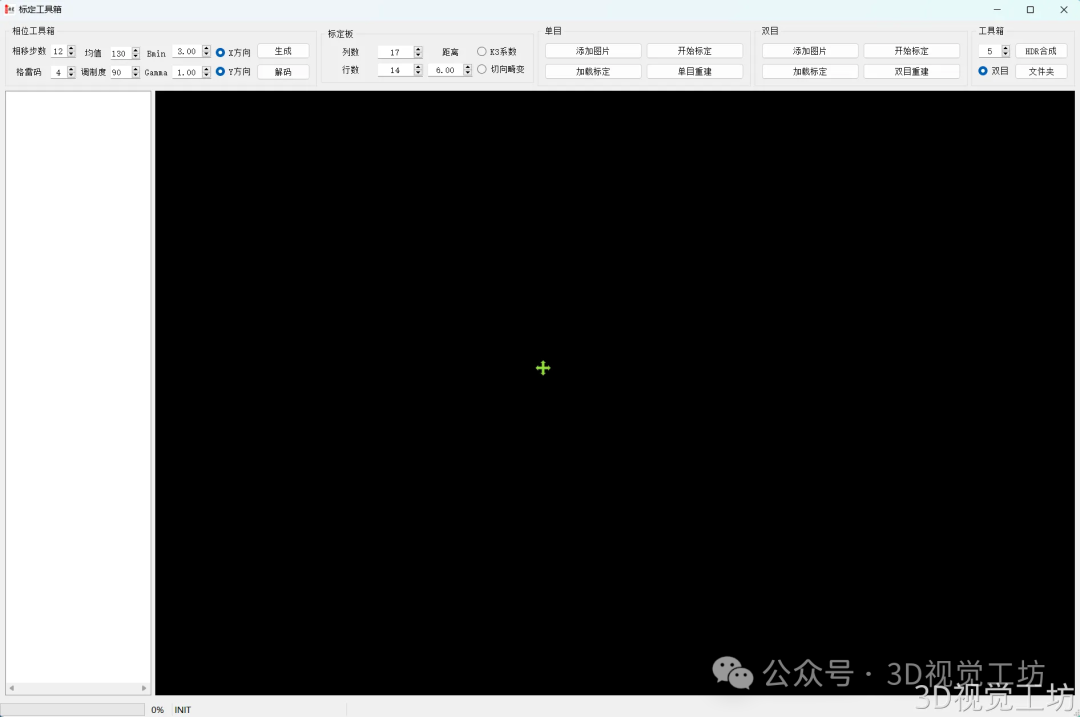
算法模块
- 标定算法
- 双目线激光扫描
- 三维重建
- 扫描参数设置
- 扫描过程控制
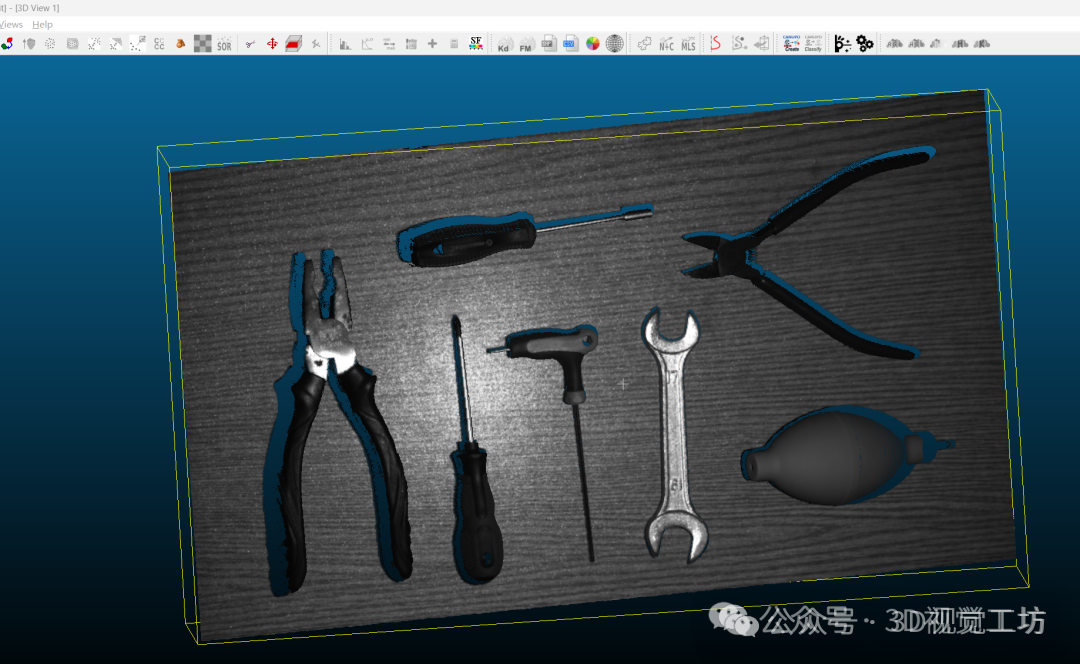
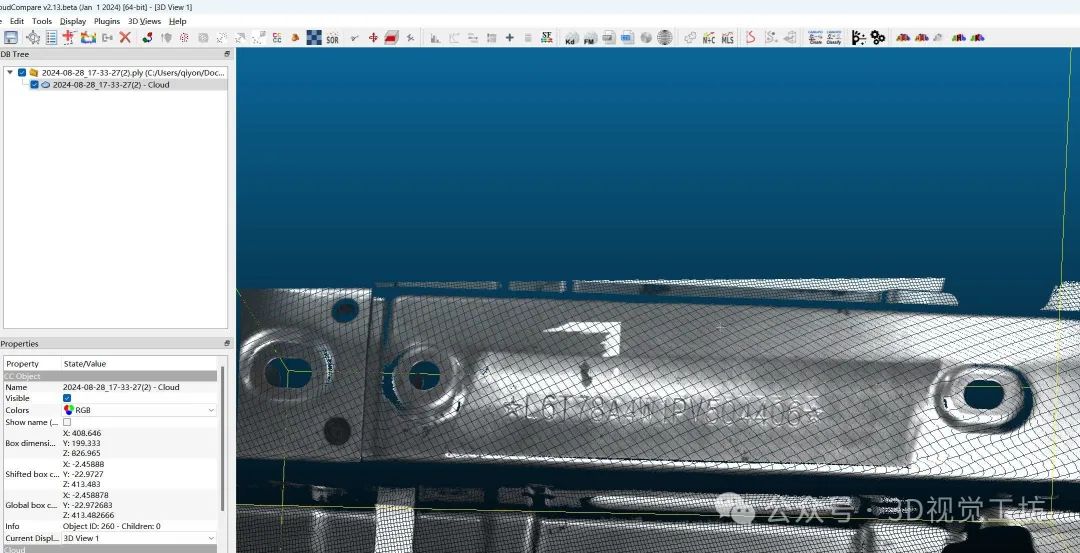
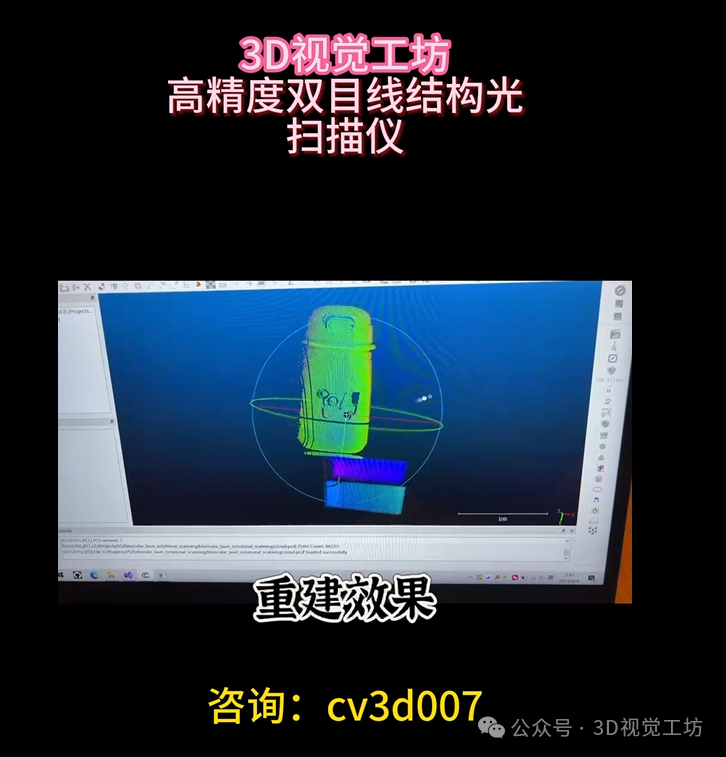
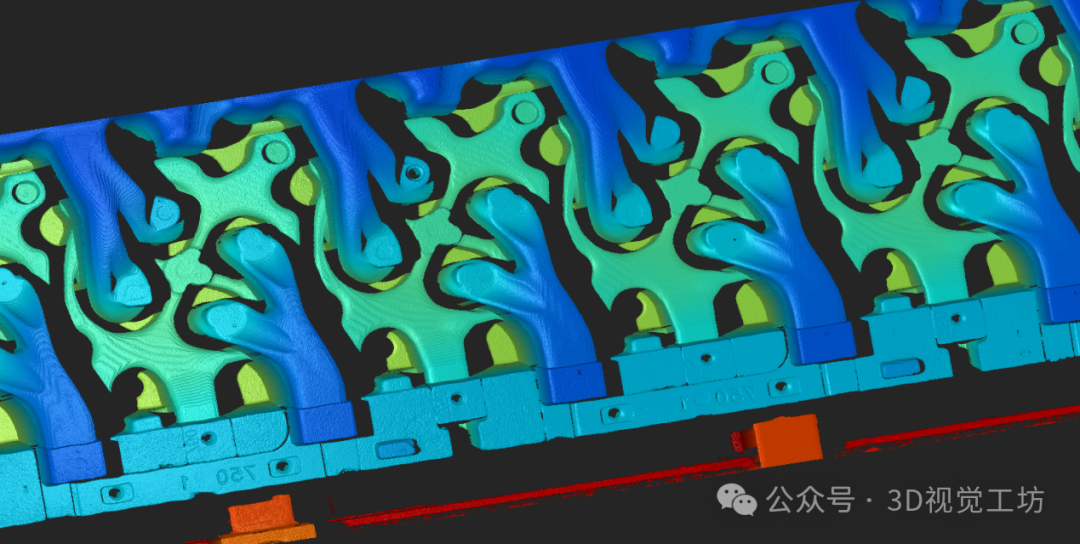
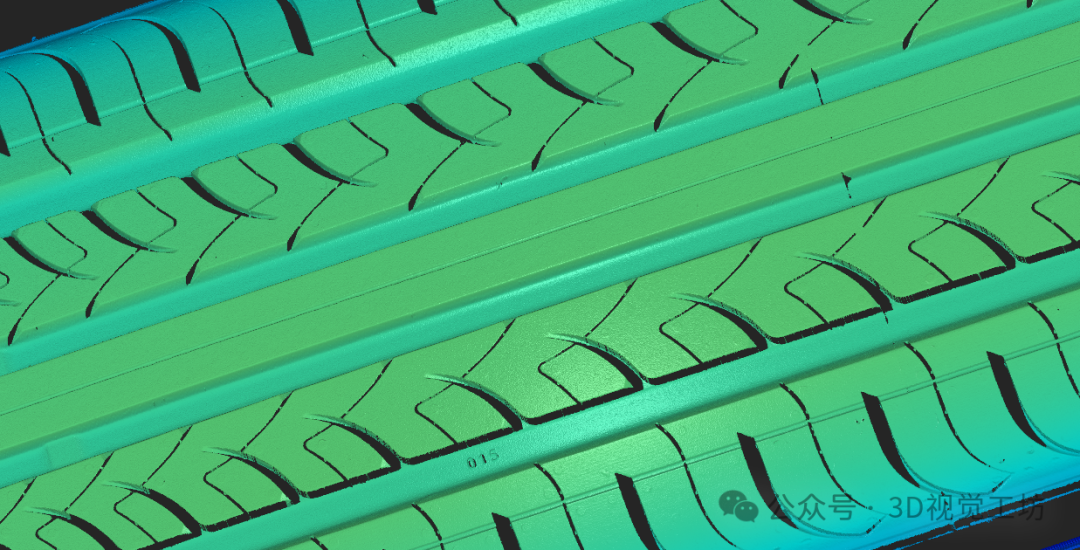
扫描效果展示
产品采购渠道



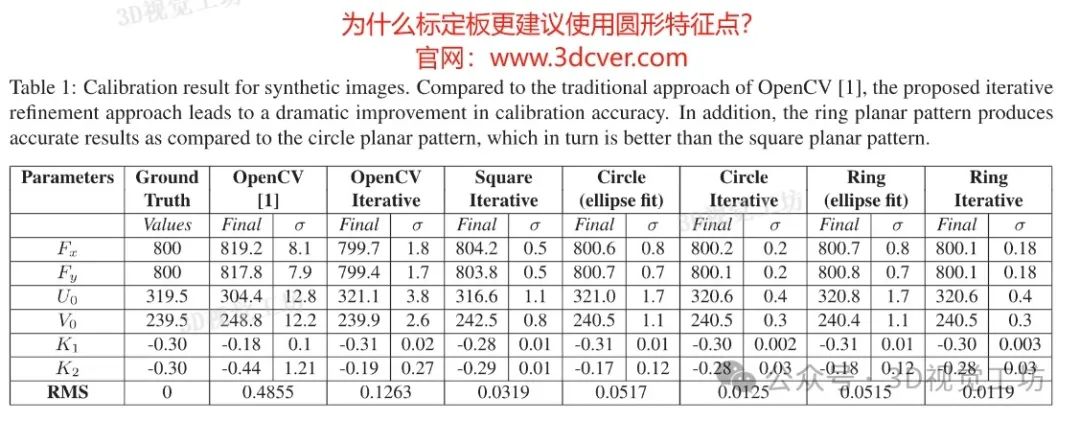

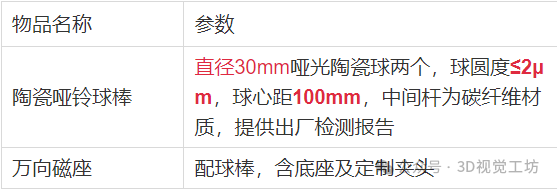
主要用于3D相机等高精度测量设备做精度实验验证用的。


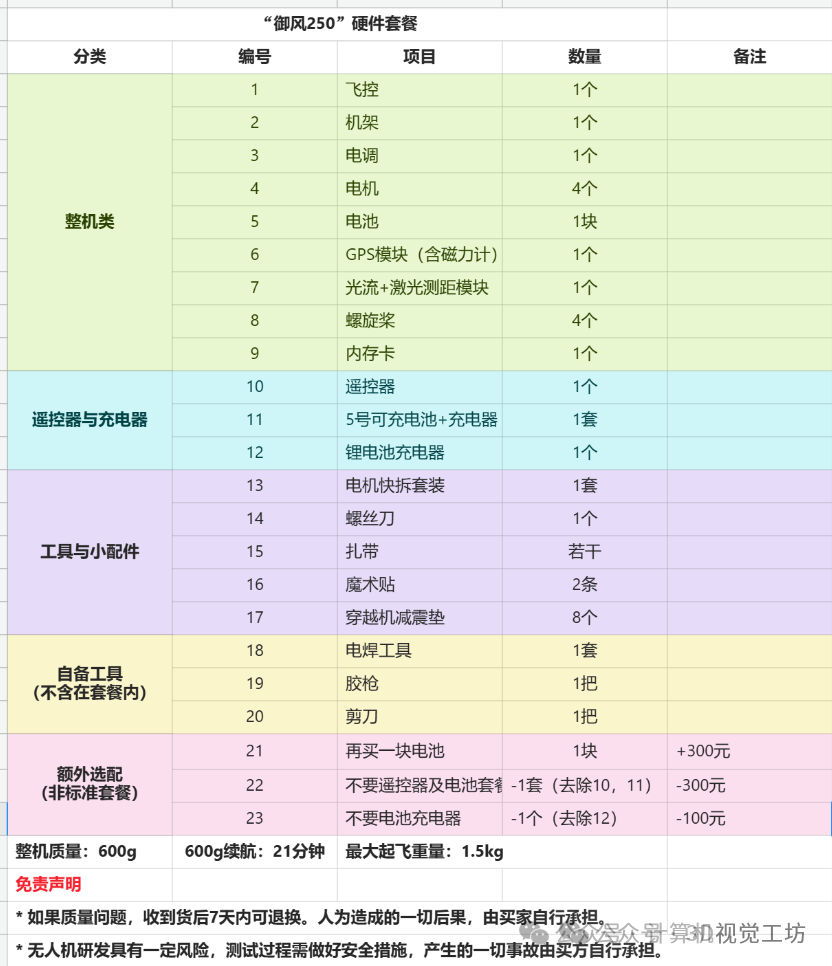




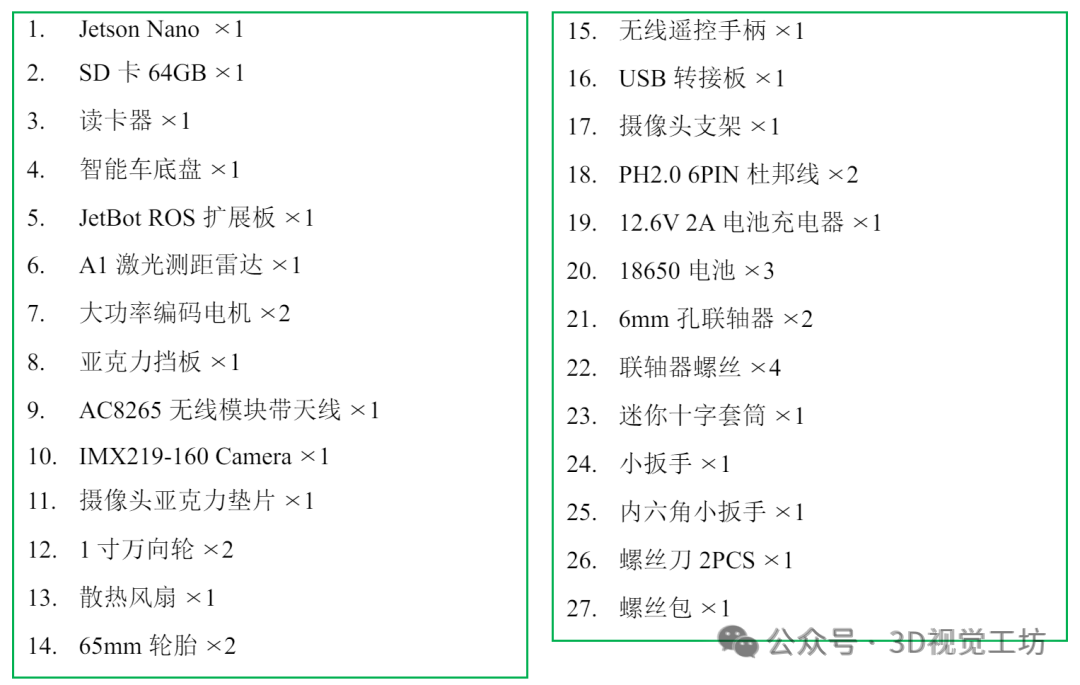
硬件配套课程,学完该课程,可以掌握哪些技能?
- 掌握ROS1基础的、核心的知识
- 看懂ROS1代码,会用C++编写ROS节点
- 掌握2D激光SLAM基础的、核心的知识
- 会用C++实现SLAM核心算法
- 会使用gazebo、rviz进行2d激光slam仿真
- 会使用C++编写一个2d激光slam简易仿真
- 对智能小车硬件和系统组成有直观认识和理解
- 在智能小车上修改和部署自己的算法和功能

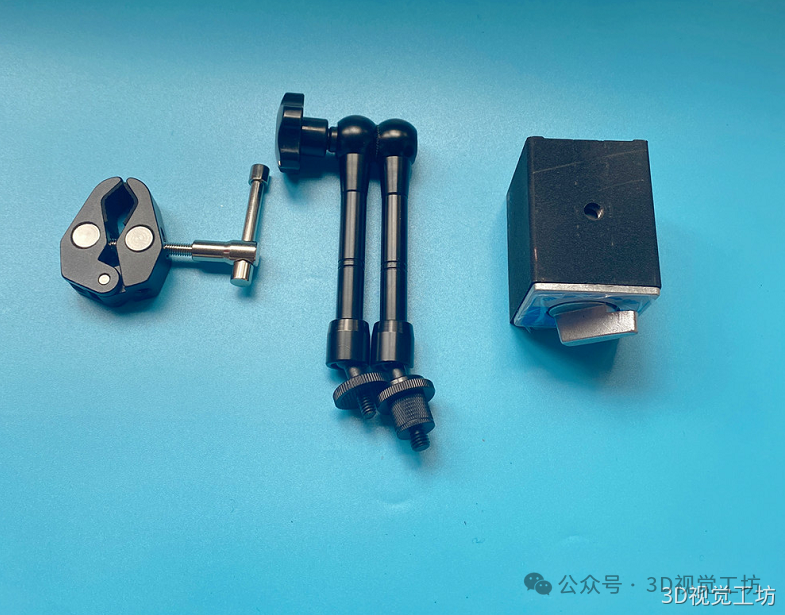
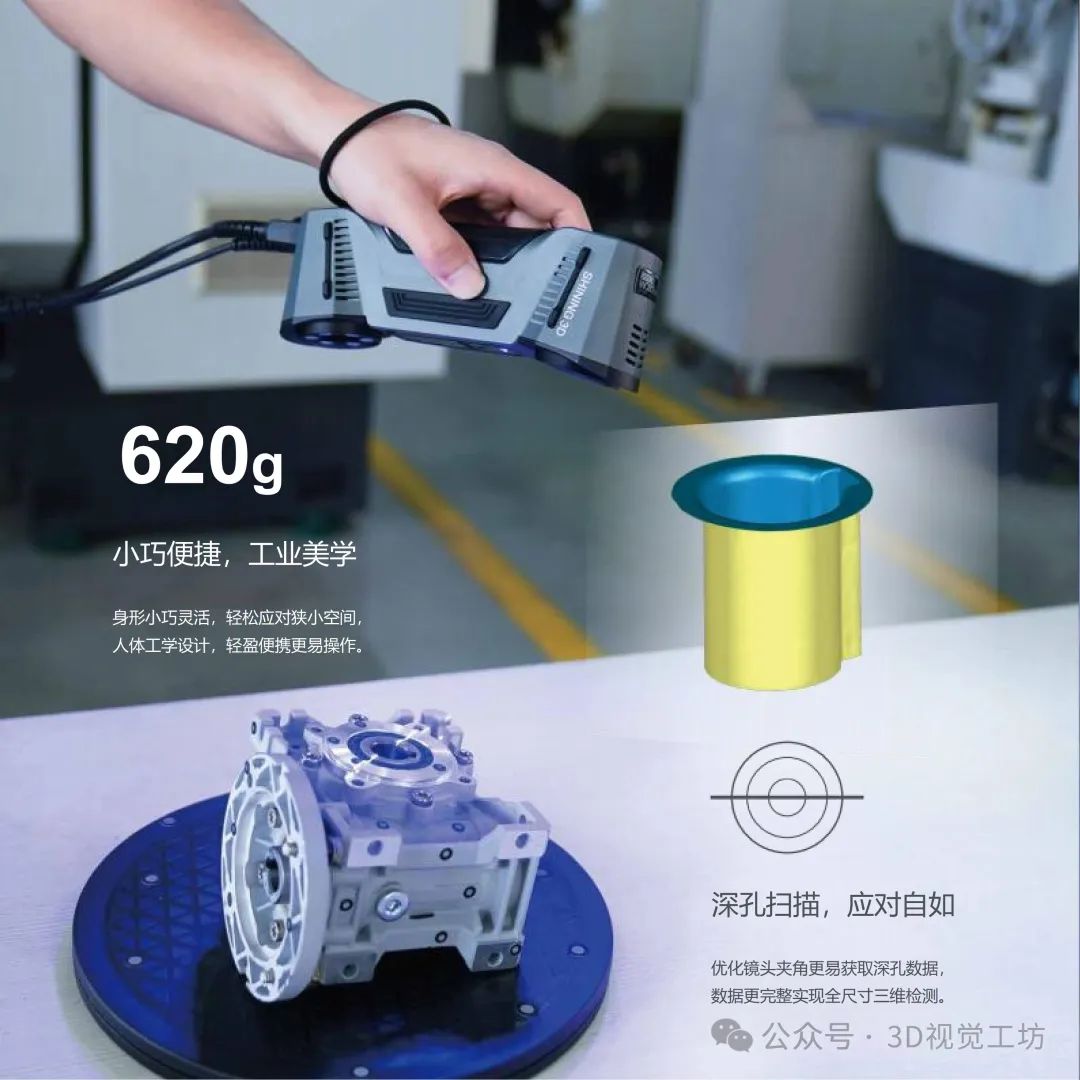
产品外观

测量效果
产品参数

应用场景
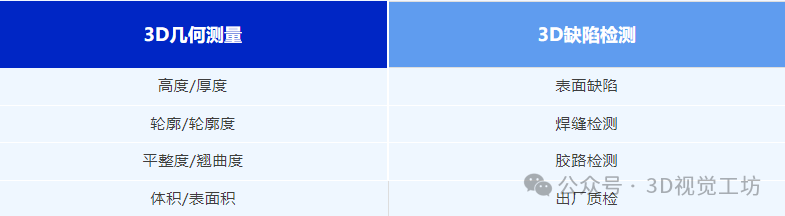
应用行业

采购请联系

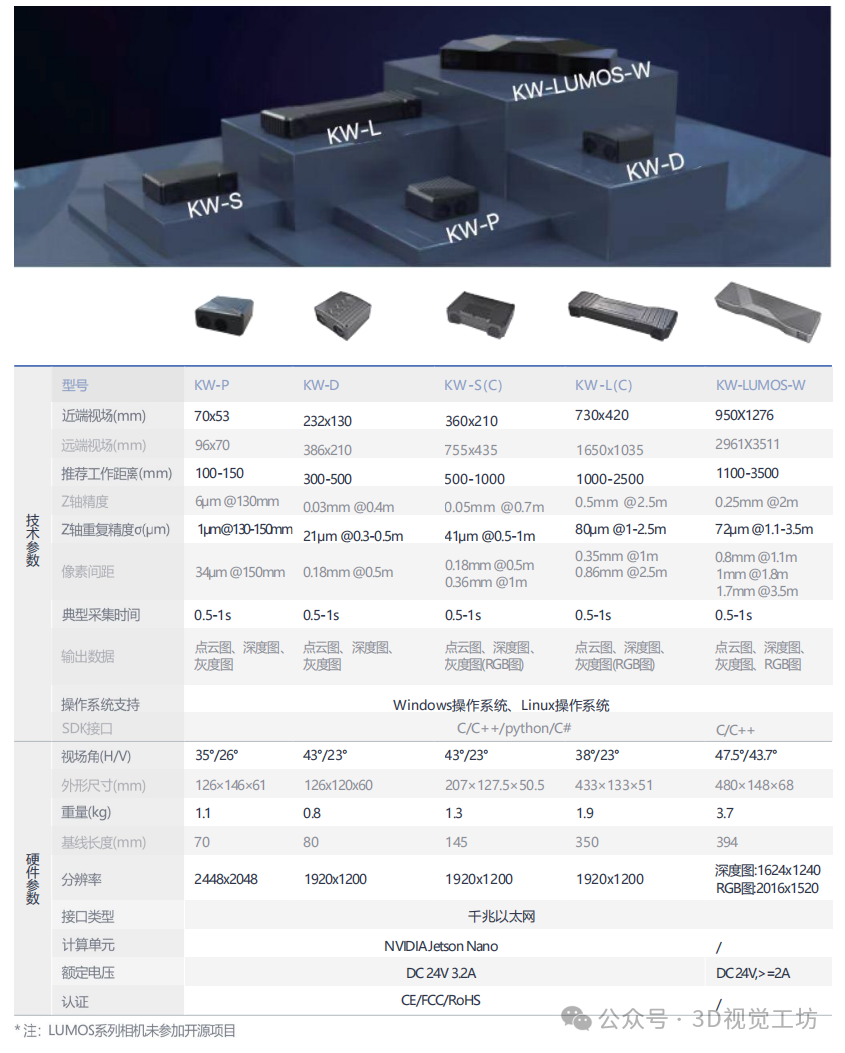
双目散斑结构光3D相机,高精度、抗高反、测距远等

技术参数
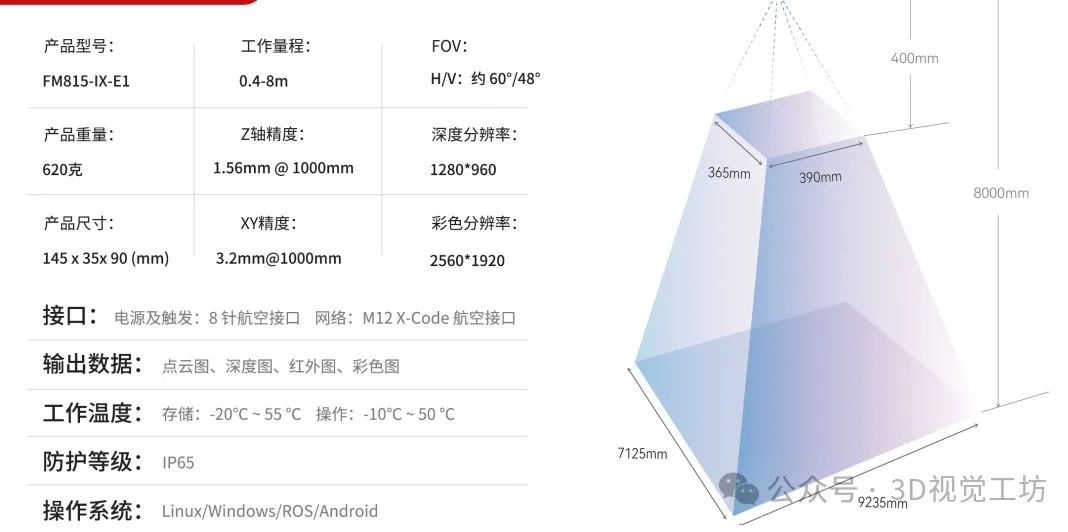
硬件规格

采购商品








采购请联系

第十一部分:ToF模组









最后
以上整理的仅仅是冰山一角,国内优秀厂家的传感器是非常多的,像奥比中光的Gemini系列双目散斑模组、迈尔威视的ToF也是非常优秀的。
希望以上整理的内容,能对您学习3D视觉或者硬件选型带来一些参考,如果您有知道其他优秀的3D视觉模组,欢迎底部留言。

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/184672.html