
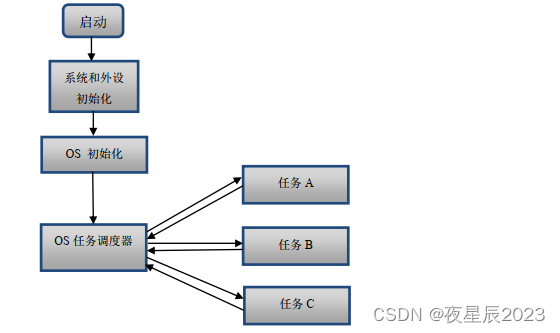
在实时嵌入式系统开发中,ThreadX作为一种可靠、高效的实时操作系统(RTOS),其任务管理功能备受开发者青睐。本篇博客将深入解析ThreadX任务管理,并重点介绍几个关键函数的使用方法和作用。
- tx_thread_create()
tx_thread_create()函数用于创建ThreadX任务。通过指定任务的入口函数、堆栈大小、优先级等参数,该函数将为任务分配必要的资源并将其加入到任务列表中。示例代码如下:
TX_THREAD my_thread; UCHAR my_thread_stack[STACK_SIZE]; VOID my_task_entry(ULONG param) {
// 任务代码逻辑 } VOID main() {
// 创建线程 tx_thread_create(&my_thread, "My Thread", my_task_entry, 0, my_thread_stack, STACK_SIZE, THREAD_PRIORITY, THREAD_PRIORITY, TICKS, TX_AUTO_START); // 启动调度器 tx_kernel_enter(); } 讯享网
- tx_thread_suspend() 和 tx_thread_resume()
tx_thread_suspend()函数可将任务挂起,使其处于暂停状态,不再参与调度。相应地,tx_thread_resume()函数可恢复被挂起的任务,使其重新参与调度。这对于特定场景下的任务控制非常有用,示例代码如下:
讯享网TX_THREAD my_thread; VOID main() {
// 创建线程 tx_thread_create(&my_thread, "My Thread", my_task_entry, 0, my_thread_stack, STACK_SIZE, THREAD_PRIORITY, THREAD_PRIORITY, TICKS, TX_AUTO_START); // 挂起线程 tx_thread_suspend(&my_thread); // 恢复线程 tx_thread_resume(&my_thread); // 启动调度器 tx_kernel_enter(); }
- tx_thread_terminate()
tx_thread_terminate()函数用于终止指定的ThreadX任务。任务终止后,所占用的资源将被释放,并且不再参与调度。示例代码如下:
TX_THREAD my_thread; VOID my_task_entry(ULONG param) {
// 任务代码逻辑 // ... // 终止任务 tx_thread_terminate(&my_thread); } VOID main() {
// 创建线程 tx_thread_create(&my_thread, "My Thread", my_task_entry, 0, my_thread_stack, STACK_SIZE, THREAD_PRIORITY, THREAD_PRIORITY, TICKS, TX_AUTO_START); // 启动调度器 tx_kernel_enter(); } - tx_thread_sleep()
tx_thread_sleep()函数可使任务进入睡眠状态,并在指定的时间间隔后自动唤醒。睡眠状态下的任务会释放CPU资源,以便其他任务能够执行。示例代码如下:
讯享网VOID my_task_entry(ULONG param) {
while (1) {
// 进行任务逻辑处理 // ... // 睡眠500个时钟节拍 tx_thread_sleep(500); } }
通过合理使用上述ThreadX任务管理函数,开发者可以实现任务的创建、调度、挂起、终止和睡眠等操作。这些函数为嵌入式系统的任务管理提供了便捷而强大的工具。
当然,ThreadX还有更多功能丰富的任务管理函数,如互斥锁、定时器等,可以根据具体需求进行使用。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/18080.html