
1、无感控制
电机有感和无感的区别就是有无位置传感器;有感驱动有位置传感器,能够检测转子位置,启动平稳,支持0速度启动;但是接线较多(电机UVW3根,位置传感器3根和电源和地线),受环境干扰较大;无感驱动则没有位置传感器,只需要UVW3根引脚线,寿命更长;但是启动不流畅,因低速或转子静止时,反电动势过小,检测不到过零点,这是所有反电动势法的共同缺点;
有感驱动:是通过霍尔信号进行组合,进而判断转子的当前位置;
无感驱动:则是通过零信号的组合判断转子的当前位置;
2、零点
说到这里肯定很多人还不知道过零信号是什么,想要知道过零信号就要先了解一下反电动势是什么了?反电动势通俗讲就是指由反抗电流发生改变的趋势而产生的电动势; 如下图,左图磁铁下移,磁通量变大,为阻止它变大,就需要有一个向上的力产生,根据右手定则,电流方向如图左下方所示;磁铁上移分析方法相同;
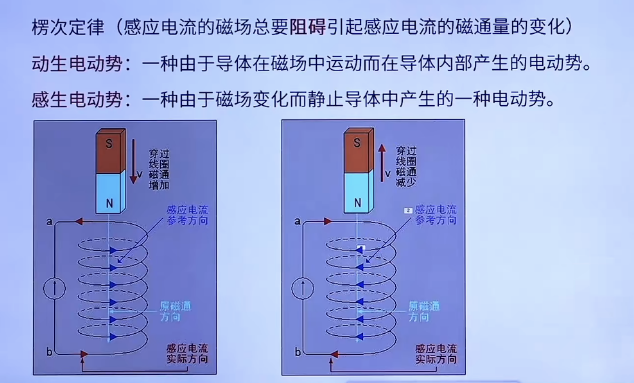
那么我们的无刷电机是哪一种呢?电子是静止的,转子(永磁体)是变化的,所以是感生电动势; 过零点示意图;
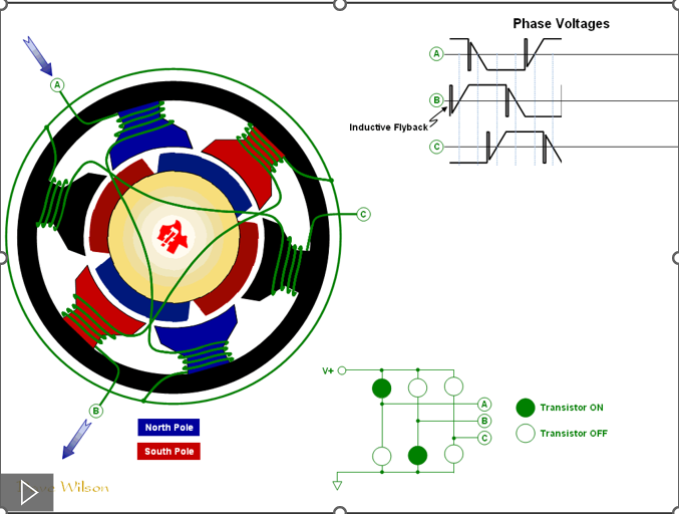
过零点:反电点势从正变化为负或者从负变化为正的点
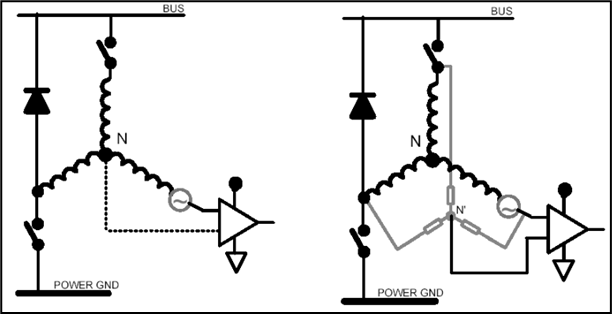
反电动势过零点都发生在不通电的那一相
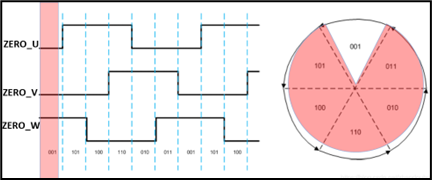
电机旋转一个电周期中电流和反电动势的波形,其中实线代表电流,虚线代表反电动势
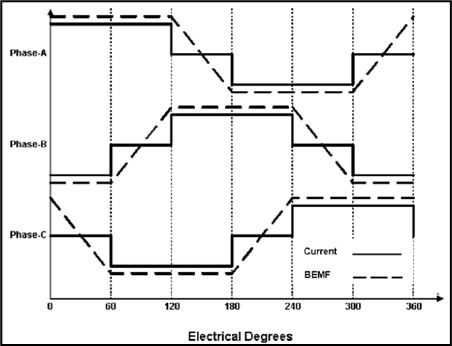
第一个60°内,A相电流为正,B相电流为负,C相电流为零,这说明电机AB相通电,电流从A相流入B相,C相为开路,反电动势的过零点正好出现在C相,因此只要在每个60°内检测不通电那一相的电压,即可检测反电动势过零点。
准确检测出反电动势的过零点,将其延迟 30°,即为需要换相的时刻
注意:1、过零信号的组合确定转子位置 2、过零点发生在换相提前30°的时刻
3. 过零信号组合对应的绕组导通情况
(正点原子)
| ZERO W |
ZERO V |
ZERO U |
U+ |
U- |
V+ |
V- |
W+ |
W- |
通电情况 |
过零值 |
|
| 正转 |
0 |
0 |
1 |
打开 |
关闭 |
关闭 |
打开 |
关闭 |
关闭 |
UH_VL |
1 |
| 0 |
1 |
1 |
打开 |
关闭 |
关闭 |
关闭 |
关闭 |
打开 |
UH_WL |
3 |
|
| 0 |
1 |
0 |
关闭 |
关闭 |
打开 |
关闭 |
关闭 |
打开 |
VH_WL |
2 |
|
| 1 |
1 |
0 |
关闭 |
打开 |
打开 |
关闭 |
关闭 |
关闭 |
VH_UL |
6 |
|
| 1 |
0 |
0 |
关闭 |
打开 |
关闭 |
关闭 |
打开 |
关闭 |
WH_UL |
4 |
|
| 1
|
0 |
1 |
关闭 |
关闭 |
关闭 |
打开 |
打开 |
关闭 |
WH_VL |
5 |
|
| 反转 |
0 |
1 |
0 |
关闭 |
打开 |
打开 |
关闭 |
关闭 |
关闭 |
VH_UL |
2 |
| 1 |
1 |
0 |
关闭 |
打开 |
关闭 |
关闭 |
打开 |
关闭 |
WH_UL |
6 |
|
| 1 |
0 |
0 |
关闭 |
关闭 |
关闭 |
打开 |
打开 |
关闭 |
WH_VL |
4 |
|
| 1 |
0 |
1 |
打开 |
关闭 |
关闭 |
打开 |
关闭 |
关闭 |
UH_VL |
5 |
|
| 0 |
0 |
1 |
打开 |
关闭 |
关闭 |
关闭 |
关闭 |
打开 |
UH_WL |
1 |
|
| 0 |
1 |
1 |
关闭 |
关闭 |
打开 |
关闭 |
关闭 |
打开 |
VH_WL |
3 |
4、无感驱动整体框图
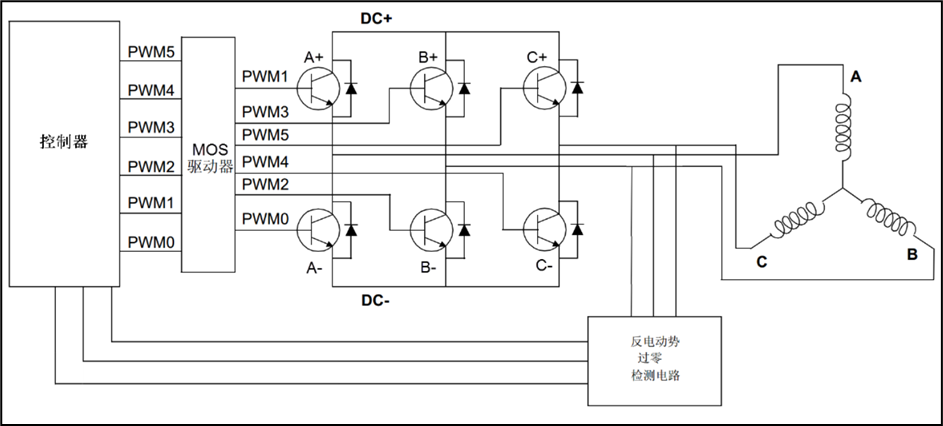 通过过零信号的组合判断转子当前位置,控制逆变器功率器件的开/关实现绕组的换相;
通过过零信号的组合判断转子当前位置,控制逆变器功率器件的开/关实现绕组的换相;
5、过零电路
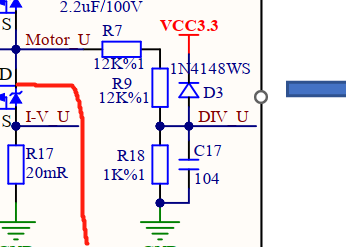
1、由于相电压过大,需电阻分压网络,进行分压
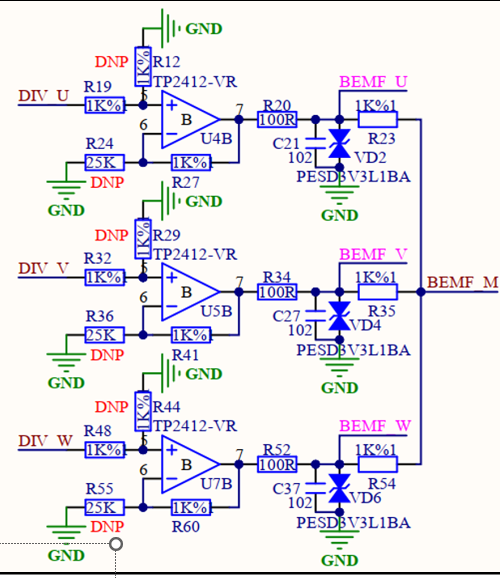
2、迟滞比较器,将输出信号和输入信号进行隔离,同时增强了信号的驱动能力
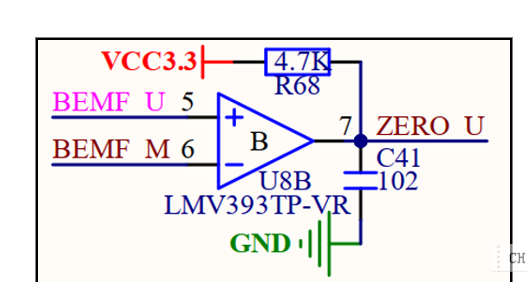
3、7 脚输出加了 RC 低通滤波,主要以去除信号线上的高频毛刺干扰
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/127401.html