
1. V2X、OBU、RSU、V2V 名词术语解释
OBU: On Board Unit 车载单元
RSU: Road Side Unit 路侧单元
V2V: Vehicle to Vehicle 车与车通信
V2X: Vehicle to Everything 车辆到一切通信
2. V2X、OBU、RSU、V2V之间的协作关系
假设有两辆智能驾驶汽车A和B
A车具备:自动驾驶计算平台mdc、V2X设备OBUB车具备:自动驾驶计算平台mdc、V2X设备OBU
智能驾驶道路路侧安装有: 路测单元RSU(RSU用来发送交通灯、交通标志、和道路上障碍物的数据给OBU)
路测单元RSU 和 V2X设备OBU也是通过 无线电波 进行通信
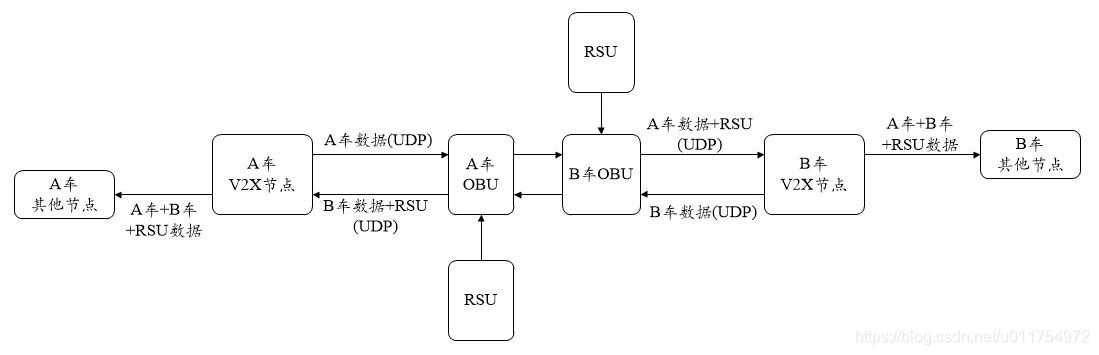
3. 以A车和B车的车路协同、车车协同 为例:
A车mdc中有自动驾驶的各个节点,包括转发obu设备发来的数据的v2x节点。
- (1)
A车mdc上的v2x节点收到A车Obu通过UDP协议发来的 {1.RSU数据 + 2.B车辆信息},然后A车mdc上的v2x节点将OBU消息解析后打包成Autosar的AP消息发送出去供A车mdc自动驾驶的其他节点订阅。
数据类型:1.RSU数据+2.B车底盘、定位信息;
数据流向:A车obu-->A车mdc的v2x节点 - (2) A车
mdc上的v2x节点订阅本车的底盘信息和定位信息等,把这些AP消息打包成proto格式,然后封装到udp数据包中,通过UDP协议发送给A车OBU.
数据类型:底盘、定位等信息;
数据流向:A车mdc的v2x节点–>A车obu - (3) A车OBU 将A车底盘、定位等信息 通过无线电波发送给 B车OBU,实现A车B车车辆底盘、定位信息共享。 (
V2V)
数据类型:底盘、定位等信息;
数据流向:双向A车obu<–>B车obu

车车通讯无RSU:

车车-车路通讯有RSU:
4. 每辆车的OBU的输入与输出
4.1 每辆车的OBU接收三部分的输入:
- (1) 路侧单元
RSU数据:
接收路侧单元RSU的 交通灯、交通标志、障碍物数据 (无线电波通信) - (2) 其他车
obu发来的其他车数据:
接收其他车obu数据,获取其他车的车辆底盘、定位灯信息 (无线电波通信) - (3) 本车mdc的
v2x节点发来的本车数据:
接收本车mdc的v2x节点转发的本车底盘和定位信息(udp)
4.2 每辆车的OBU会有两路输出:
- (1) 整合前面第一部分输入(
RSU数据) 和 第二部分输入(其他车obu发来的其他车数据),通过udp发送给本车mdc的v2x节点; - (2) 将前面第三部分输入(
本车mdc的v2x发来的本车数据),通过本车和其他车的obu之间的通信,发给其他车obu;
【注意】:目前obu上的开发,是我们公司其他部门的obu开发人员根据我们的需求进行开发,我目前没有代码工程开发权限,后面会有。我目前拥有的权限是mdc的v2x开发权限。
其中,本车obu 发给 本车v2x节点的 (1.RSU数据) 和 (2.其他车底盘定位信息),会被本车v2x解析为autosar消息后,转发给本车其他节点。
本车v2x节点 会把 本车定位底盘信息 通过UDP转发给 本车OBU。
obu 发给自车mdc的v2x节点的UDP数据包,通过包头类似 0x88,0x89标识来确认是否使我们想要的数据
mdc 发给自车obu 的UDP数据包,通过包头类似 "obuxxx"等做标识来确认是否使我们想要的数据
5. mdc的v2x节点的 输入 与 输出:
5.1 mdc的v2x节点的输入:
mdc的v2x节点有很多输入,包括车辆底盘、定位、odometry、调度、本车obu等。- 其中,本车
obu接收到其他车的obu数据后,直接和RSU过来的数据一起打包后透传给mdc的v2x节点。
5.2 mdc的v2x节点的输出:
- (1) 将本车
obu发来的数据解析后,封装成Autosar消息,转发给mdc各节点进行订阅; - (2) 通过
udp将本车信息发送给本车obu。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/123408.html