
做机器人底层程序的时候,经常用到航迹推演(Odometry),无论是定位导航还是普通的方向控制。航迹推演中除了对机器人位姿进行估计,另一个很重要的关系是移动机器人前进速度
讯享网、转向角速度与左轮速度、右轮速度之间的转换。
在机器人局部路径规划算法DWA解析一文中,是在假设已知机器人前进线速度和角速度的情况下,对机器人航迹推演的位姿进行推导了,然而缺少如何通过左右轮速度得到、,因此本文将补上这个空缺。
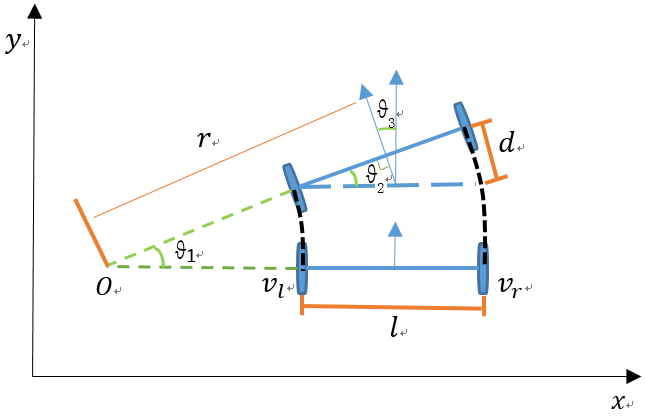
下图是移动机器人在两个相邻时刻的位姿,其中是两相邻时刻移动机器人绕圆弧运动的角度,是两相邻时刻移动机器航向角(朝向角head)的变化量。是左右轮之间的间距,是右轮比左轮多走的距离。是移动机器人圆弧运动的半径。
移动机器人前进速度等于左右轮速度的平均,这个好理解。
(1)
现在来推导机器人航向角如何计算,以及如何计算角速度。如图所示,把两个时刻的机器人位置叠加在一起,可以清楚的看到移动机器人航向角变化量是。从图中的几何关系可以得到:
也就是说移动机器人航向角变化了多少角度,它就绕其运动轨迹的圆心旋转了多少角度。这句话很好验证,我们让机器人做圆周运动,从起点出发绕圆心一圈回到起点处,在这过程中机器人累计的航向角为360度,同时它也确实绕轨迹圆心运动了360度,说明机器人航向角变化多少度,就绕圆心旋转了多少度。而这三个角度中,很容易计算出来,由于相邻时刻时间很短,角度变化量很小,有下面的近似公式:
所以可以得到机器人绕圆心运动的角速度,它也是机器人航向角变化的速度:
(2)
线速度、角速度都有了,因此可以推出移动机器人圆弧运动的半径:
(3)
从公式(3)可以发现当左轮速度等于右轮速度时,半径无穷大,即直线运动。最后将三个公式综合起来,可以得到左右轮速度和线速度角速度之间的关系如下,:

(转载请注明作者和出处:http://blog.csdn.net/heyijia0327 未经允许请勿用于商业用途)
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容,请联系我们,一经查实,本站将立刻删除。
如需转载请保留出处:https://51itzy.com/kjqy/118180.html